
鉄道模型実験室 測定ユニットの作り直し
■ はじめに
電気機関車を対象に動力車の測定を実施した。 しかし、いろいろな不具合点が発生したため、測定ユニットの作り直しなどの対策を実施したが、すんなりとは行かなかった。 今回も、取りあえずその内容を記録しておくことにする。
.
■ 乾電池の早期消耗対策 ・・・・・ 測定ユニットの作り直し
まず最初に、乾電池の早期消耗は対策として、測定ユニットの作り直しを実施した。
今回の実験において、不安材料として感じた赤外線LEDの出力不足も心配している。 このために電流アップも対策しようとしているので、なおさら消費電流の検討が必要となった。 とはいっても、必要な電力は供給しなければならないので、充電式の乾電池で、こまめに充電しながら使用することにした。 そして、充電式乾電池を購入すべくホームセンターに出向いたが、充電式乾電池を手に取ってみて、手が止まってしまった。
電圧が “ 1.2 V ” と書いてあるではないか! 2個使いでは2.4 ボルトである。
これは知らなかった。 3ボルトでもぎりぎりかなと思っていたので心配になったが、何とかなるであろうと判断して購入してきた。 そして、各要素での作動電圧のチェックを始めた。
無線モジュールXBeeZBは、2.1V なのでOKである。 反射式フォトマイクロセンサ(回転センサ)は、順電圧が 1.2V、IF = 30mA であり、OKである。 オペアンプは 3V 〜 32VでNGである。 タイマーICは1.5Vまで動作保証と書いてあるのでOKなり。 赤外線LEDは、順電圧が 1.2V、IF = 30mA と書いてあるのでOKだろう。 即ち、オペアンプだけが問題となるようである。
しかし、オペアンプはモータ端子電圧の差圧を測定するために使用しているが、当初予定していたレール電圧の測定を中止しているので、マイナス端子をGNDとして各要素と共通使用すれば、オペアンプを使う必要は無くなってしまう。抵抗による分圧回路を構成すれば、オペアンプを使用する必要はないのである。
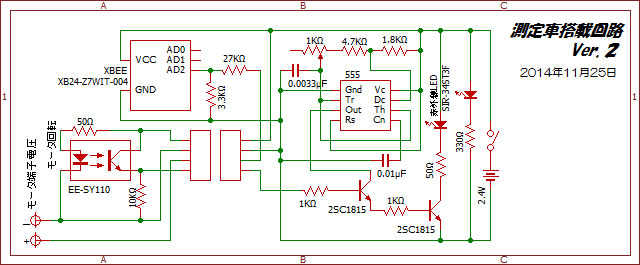
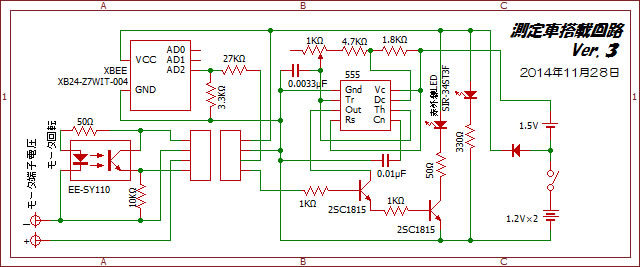
新たな回路の回路図を右上に示す。 電圧測定回路は、差圧を減圧するオペアンプを取り去り、27KΩと3.3KΩの分圧回路でXBee のアナログ端子に接続する。 そして、動力車と測定車をつなぐ配線は、回転センサと電圧のマイナス端子を共通化して本数を5本から4本に減らし、4ピンのコネクタを使って接続するようにした。
さらに、赤外線LEDの出力アップのために、100Ωの抵抗を50Ωに変更している。 また、電源用LEDの順電圧が2.4ボルト近辺のLEDを探し、バッテリの電圧チェック用として機能しないか検討してみた。 すると、3mm電球色LED (OSM54K3131A)が丁度2.4ボルトから光りだし事が分かったので、このLEDと330Ωの抵抗で、バッテリチェックとする事にした。 仕様書では、順電圧は、Vf = 3.1V となっているが、実物は 2.4V であった。
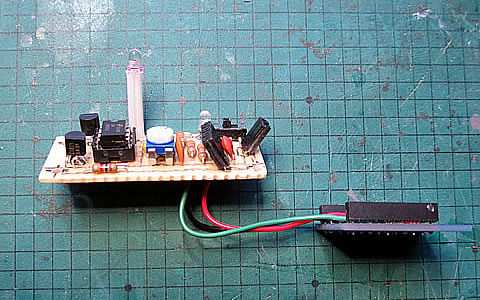
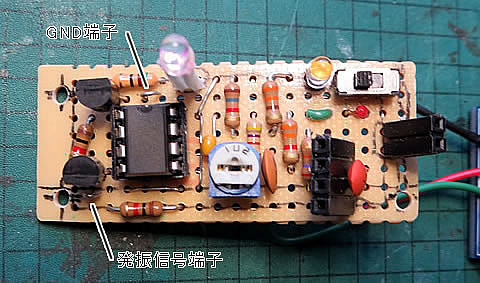
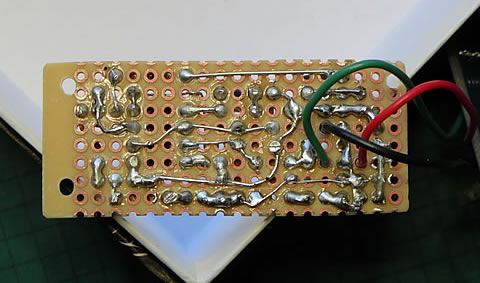
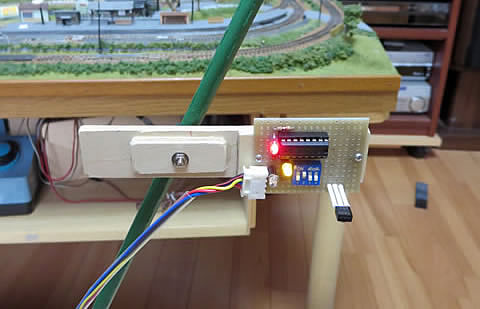
ハンダ付けは相変わらず下手くそであるが、今回は少し余裕のある部品配置である。 また、発振周波数を測定出来るようように、測定子が接続できるダミーの端子も設けている。 左下の写真の発振信号端子とGND端子である。
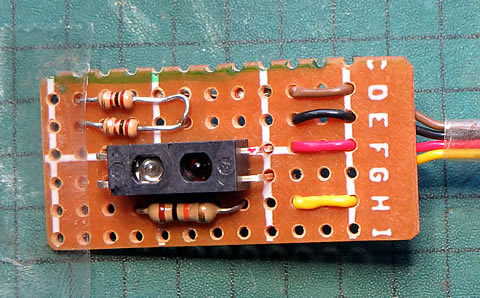
回転センサ部分は、 100Ω抵抗を50Ωに変更する時、抵抗を取り外すのが面倒であったので、100Ωを並列に入れて誤魔化した。 さらに、モータ端子電圧測定線もまとめてコネクタにて接続するようにした。
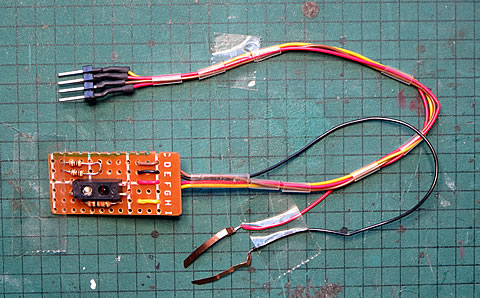
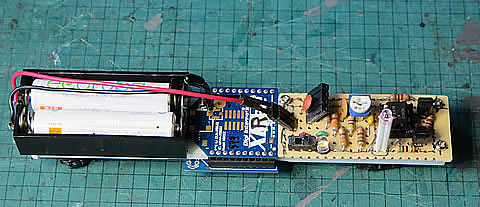
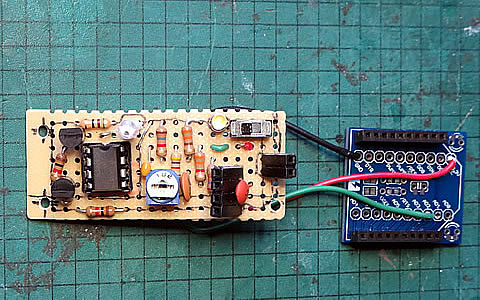
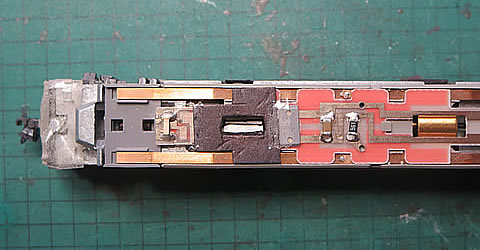
測定車として組付けた状態を上に示す。
■ 乾電池の電圧
問題となっている乾電池について、使用していた乾電池の電圧を2個のセットで測定してみると下記の様であった。
| 種類 | 状態 | 電圧 |
|---|---|---|
| アルカリ乾電池 | 使用済み1 | 2.77 Volt |
| 使用済み2 | 2.80 Volt | |
| 新品 | 2.98Volt | |
| ニッケル水素電池 | 充電済み | 2.66 Volt |
意外にも新品でも3ボルトを切っていた。 新品といえどもストック品のため電圧低下をきたしていたようである。 通常は3.2ボルト程度はあると思っていた。 さすがに使っていた乾電池は、2.8 ボルトを切っていたが、2日後に測定してみると 0.2 ボルトほど回復していた。
また、ニッケル水素電池でも 2.66 もあり、充電具合によっては、大きく変化しそうであるので、仕様通りに 2.4 ボルトを標準としておかなければならないだろう。
要するに、乾電池はかなり電圧の変化がある事を覚悟しておく必要がありそうだ。
■ 発振周波数の調整・・・・・・・・発振しない!
測定ユニットを新しく作ったので、赤外線通信用のキャリヤ波の周波数を調整することにし、下左の写真の様な配線を実施して、発振周波数を測定しようとした。 ところがシリアルモニタに表示されたデータは、無情にもゼロの羅列であった。 発振していないのである。
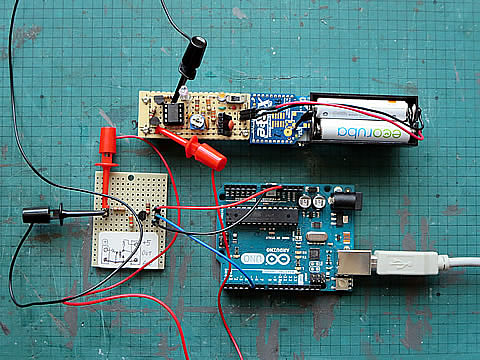
半信半疑で、今まで使用していた乾電池に変えてみた。 すると見事に発振している。 なんで? 上記の乾電池の電圧測定結果を知っているので、電圧の違いとは思えないが、試しに、ブレッドボードに同じ回路を組み立てて、電圧の違いによる発振状態を調べてみることにした。 上記の消費電流の調査の時に周波数測定を実施しておればもっと早く気が付いたかも知れないが、抵抗値やコンデンサ容量の違いによって、作動する電圧も異なって来るだろうと予想して、ブレッドボードにて実験する事にした。
| 抵抗A | 抵抗B | コンデンサ | 作動最低電圧 | 計算周波数 |
|---|---|---|---|---|
| 507Ω | 5.05KΩ | 3.39 nF | 2.70 Volt | 40.1 KHz |
| 325Ω | 5.03KΩ | 3.39 nF | 2.70 Volt | 40.4 KHz |
| 988Ω | 4.78KΩ | 3.39 nF | 2.70 Volt | 41.0 KHz |
| 99Ω | 220Ω | 68 nF | 2.70 Volt | 39.4 KHz |
まず、電圧を4ボルト程度に設定し、抵抗 A と抵抗 B 、およびコンデンサを取り換えながら半固定抵抗の値を調整し、発振周波数を 38±1 KHz に設定する。
そして、電圧を少しずつ下げていき、発振の限界電圧を見ていった。 その結果を左の表に示す。 電圧の設定は、0.1 Volt 単位であるが、見事に 2.70 Volt が限界であった。 2.8 Volt にすると少しずつ周波数が下がって来て、2.69 Volt にすると止まってしまうのである。 抵抗値などの組合せを変えても結果は同じであった。 また、実測した抵抗値やコンデンサ容量をもとに周波数を計算した値を表示しておいたが、周波数は間違いと判断出来る。
LMC555 の仕様書によると、1.5V 動作電源電圧の保証と書いてあるが、今回のような無安定動作の場合は、当てはまらないのだろうか? ともかくも、丁度限界点を挟んで僅かの違いで NG になってしまったようである。 もしこれがぎりぎりで OK であった場合はには、逆に悲劇となってしまったかも知れない。
電池が元気なうちは OK であったかも知れないが、少しくたばって来たら発振が停止してしまい、、1.5V 保証を信じきっているので、 なんで? とばかりにウロウロしたかも知れないのである。 ともかくラッキーであったと判断して、前向きに考えることにしよう!
さて、対策をどうするか?
2.7ボルト以下でも 38KHz で発振する回路を探し出すか? ネットで四苦八苦しながらアイディアを探した。
- 38KHzで振動する水晶振動子を使う。 ⇒ 周辺回路が難しそうで自信がない。
- トランジスタを2ヶ使って発振させる。 ⇒ 作動が不安定との事らしい。
- マイコンのロジックを使って発振させる。 ⇒ マイコンの勉強が必要となり、マイコンが低電圧で作動するかどうか不明。
- NAND を4ヶ使って発振させる。 ⇒ ICの作動が保証されるのか? また騙されそうである。
この他にも色々な方法があると思われるが、これらの回路もまた手探りの状態で始めなければならないので、諦める事にした。 素人には荷が重いのである。
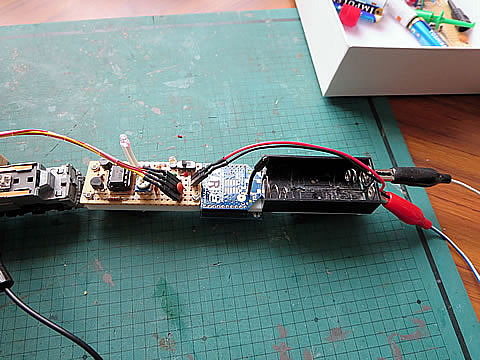
姑息な手段として、右の様な回路を考えてみた。 タイマ回路だけ、もう一つの乾電池を付加して、2階建てにするのである。 メインの回路には逆流防止のダイオードを入れておけば問題無いような気がするが、本当に大丈夫だろうか不安である。
乾電池を3個使う場合には、ツェナーダイオードを使う手もあることに気が付いたので検討してみよう。 3.6Volt 以上になって XBee の制限電圧を超えるので、3.3Volt のツェナーダイオードで電圧制限しようとする方法である。
と言うわけで、当面はアルカリ乾電池を取り換えながら様子を見ていくことにする。 単4アルカリ乾電池の容量は、900mAh あると言う。 90mA で使うと 10時間も持つではないか! 特価品で無く、信用のある電池を使ってみることにしよう。
こうして、従来どうりのアルカリ乾電池を使って、赤外線通信用の発振周波数を 38KHz に調整して測定ユニットを完成とさせた。
■ 電気機関車 EF64-1032号機の測定準備
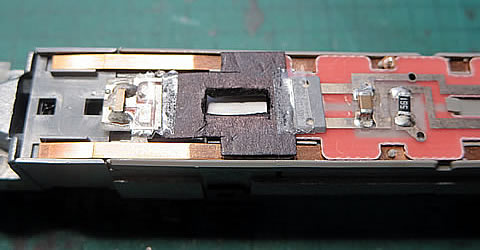
先回の実験の続きとして、KATO製の電気機関車 EF64-1032号機を使用して、測定の準備をすすめた。 最初に回転センサの改善として、測定窓を作ることにした。 これは赤外線の乱反射(?)防止をねらい、フライホイールに塗った白黒のペンキ(アクリル絵具)だけが見えるように厚紙で窓を作り、マジックで黒く塗りつぶして貼りつけたものである。 下の写真。
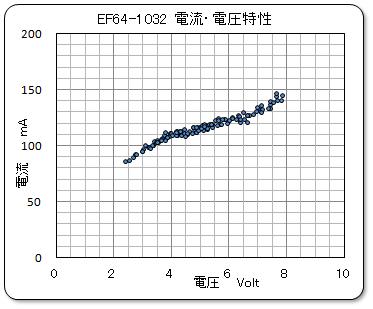
■ 消費電流の測定
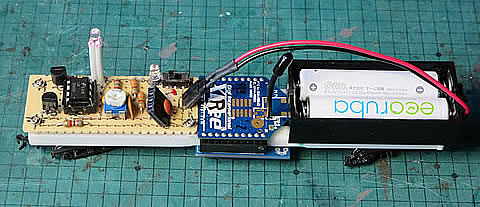
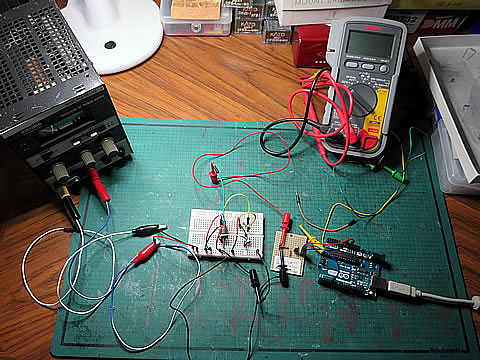
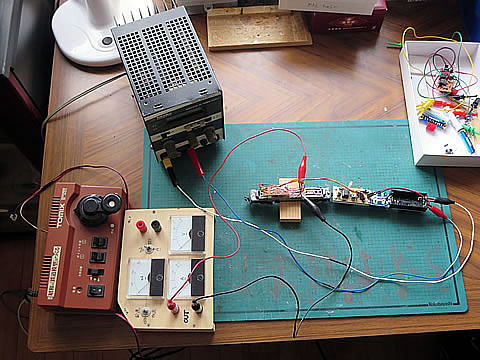
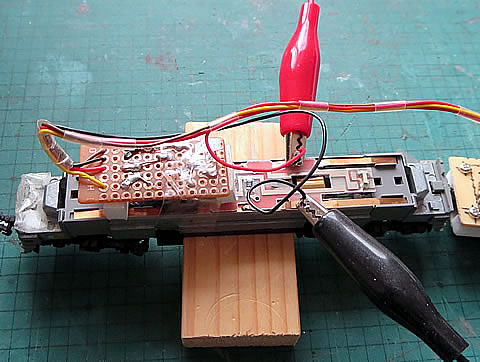
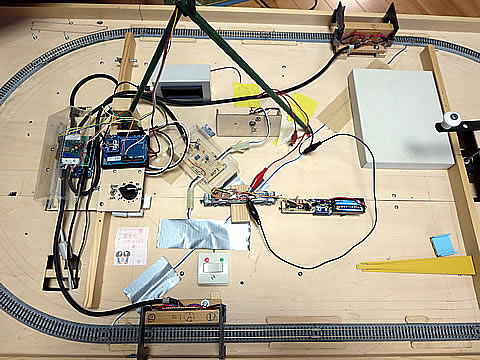
次に新しく作り直した測定ユニットの消費電流を測定した。 測定方法は下の写真に示すように、安定化電源を使って測定ユニットに電力を供給し、その電圧と電流を測定するのである。 電圧と電流は安定化電源のモニタの値を読み取っている。 また、測定ユニットの各要素が作動している状態にするため、TOMIXのパワーユニットによってモータを動かした状態で測定している。 モータは4ボルト程度の低速で回転させている。
 .
.
今回作ったユニットをモデル2とし、最初のユニットをモデル1として、両方のユニットを同じ状態で測定した。
ユニットの消費電流を測定した結果を下のグラフに示す。
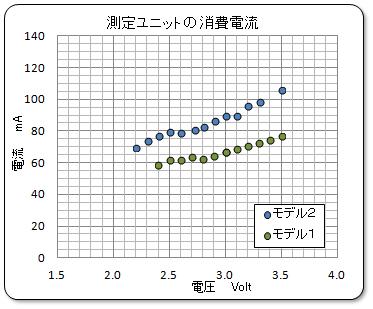
乾電池の早期消耗対策として測定ユニットを作り直したのに、消費電流がおよそ 20mA もアップしていて矛盾するが、 20mA のアップに押さえられた事を良しとしよう。2.7ボルト近辺で、特性が折れ曲がっているようであるが、これもタイマーICの発振状態が影響しているのだろうか。
■ モータ端子電圧の校正
次に、動力車を固定した状態でモータ端子電圧の校正と、新しく作って測定ユニットの機能チェックを実施した。 方法は、先回と同様に、動力車を線路から外して木片の上に置き、モータを空転させる。 今回はウォームギヤも取り外した状態で実施したので、モータは空転状態である。 また、モータへの電力は、線路に供給される配線の途中に接続して供給する。 すると電圧の測定部とモータ端子部の電圧降下量は殆どゼロのはずである。 そして、同じ測定プログラム(スケッチとEXCELの処理プログラム)を同じ様に走らせるために、ダミーの車両を走らせた。 低い電圧での測定のために、KATO のC57 を走らせた。 回転数やモータ端子電圧の測定データは、赤外線と無線で送信させるので、これらの機能チェックともなっている。
 .
.
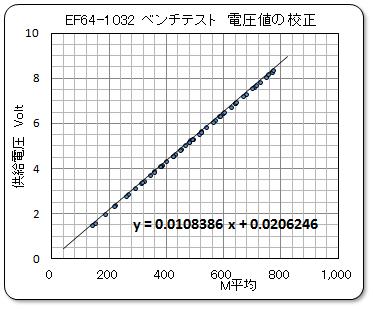
測定は問題無くスムースに実施出来た。 送信されたモータ端子電圧のデジタル値の平均と供給電圧の値をグラフ化したのが、上のグラフである。 このデータより、電圧への換算式を得る事が出来る。
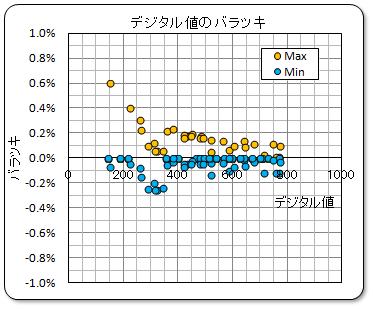
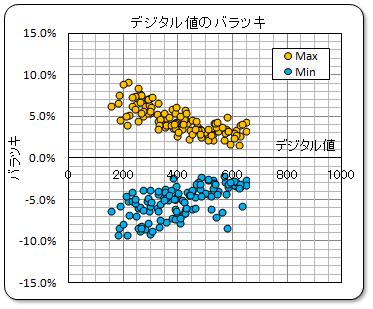
また、この時の電圧デジタル値は、10 個のデータが送信されているが、その値のバラツキを%で示すと左のグラフとなる。 平均値から最も大きい値をMax 値とし、もっとも小さい値をMin 値として計算したが、コンマ何%のオーダーであり、デジタル値で言えば±1の範囲となる。
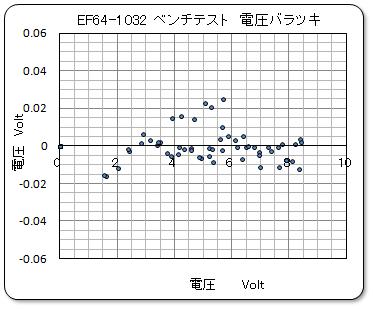
さらに上記の換算式を使用した場合の電圧値としてのバラツキは右のグラフのようになり、電圧測定が信頼できる事を示していると考えている。
■ 電気機関車 EF64-1032号機の測定
準備が整ったので、実際にEF64-1032 号機を走らせて動力特性を測定した。 測定前のレールのクリーニングは、クリーニング液の使用を中止し、GSIクレオス製のMr.砥ぎ出しクロス 3000番(アイボリー色)を使って磨くことにした。
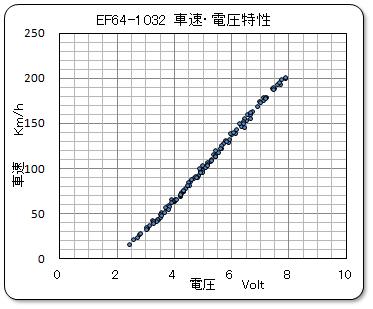
◆ 速度特性の測定
まず、速度特性を測定したので、そのデータを右に示す。 測定データは、見違えるほど安定してきた。 これならば信頼出来そうである。
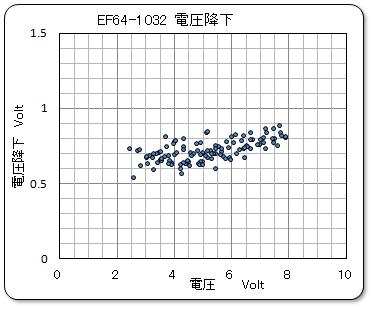
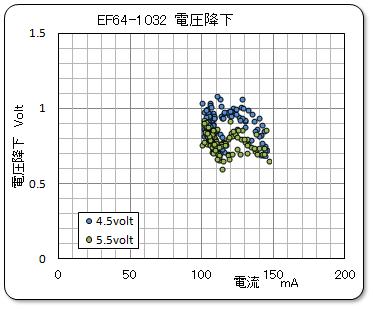
電圧降下量についても、左側のグラフに示す。 値としては予想している範疇であるが、前記のベンチテスト場合よりはバラツキが大きくなっている。
A/D変換された10個のデジタル値対象に、バラツキ具合を前期と同様な方法でグラフ化したが(右側のグラフ)、値としては10倍以上になっている。
これは、レールと車輪、車軸と集電子(ピポット軸受部)などの不安定な接触部分があるので、電気抵抗が不安定になるものと想定され、電圧降下量のバラツキは仕方が無い事なのかも知れない。
この電圧降下値とバラツキを観察することで、そのモデルの集電性能を見る事が出来そうである。
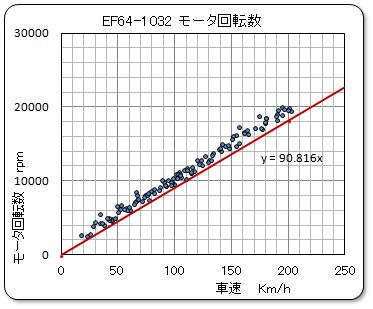
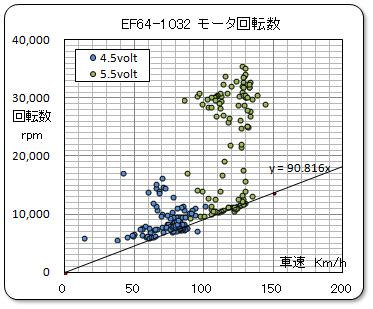
次に、モータ回転数を見てみよう。 測定データを左に示す。
まず、モータ回転数と車速を示す左のグラフにて、スリップ率がゼロの場合を赤線で示したが、全体的に 200rpm 程度速くなっている。
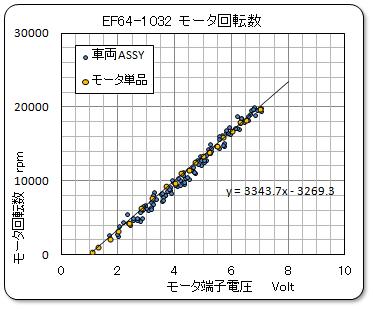
また、測定したモータ端子電圧を横軸にとってみると、モータ単品状態の場合と殆一致する。 ただ、データのバラツキ具合が、車速・電圧特性の場合よりも大きくなっているのが気になっている。
もし、モータ回転数が端子電圧との関係でバラツクのであれば、その結果として生じる「車速」でも、もっとバラツイテもよさそうであるのだが・・・・・・。
「原因」と「結果」の関係が矛盾しているような気がする。 これは、回転数かあるいは端子電圧の計測方法がバラツクと考えるべきなのだろうか?
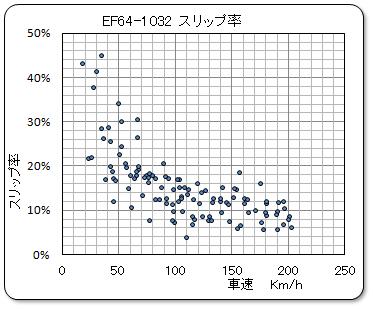
このモータ回転数のデータを使ってスリップ率を計算したグラフを右に示す。 スリップ率が10%前後なので、少しは納得できるが、バラツキが大きい事は相変わらずである。
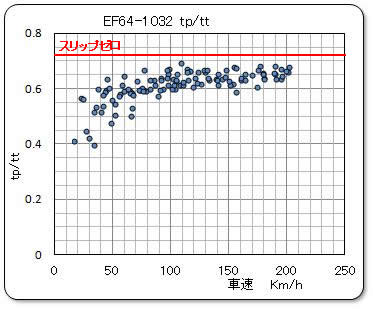
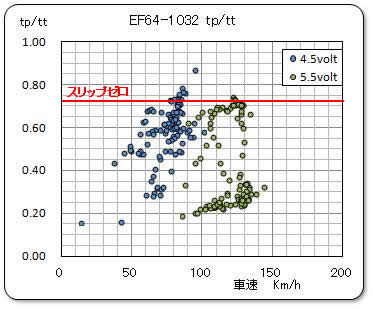
また、速度測定ゲートの通過時間である tt (sec) とモータ回転数のカウント完了時間 tp (sec) の関係をグラフ化したものをその右に示す。 カウント完了は128 回に設定して測定してる。
「動力車のモータ端子電圧と回転数の測定方法を模索」で検討したように、計測時間は、車両が通過する時の速度には関係しない事が分かっているので、スリップ率ゼロの時のtp/tt の値を赤線で示している。
低速では、測定時間が長くなるものの、カウントする数値は同じなので誤差が増えるのは納得出来ないのである。 また、tp/tt の値が小さくなると言う事は、カウント完了の時間が早くなっているという事であるが、何故なのだろうか? 車輪がスリップしているだけとは言えない気がする・・・・・・・・。
◆ 牽引力特性の測定
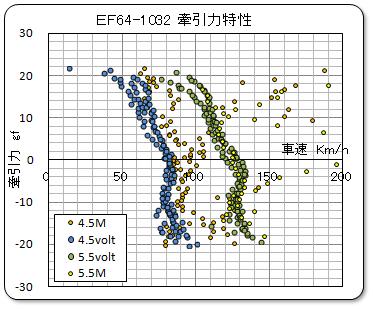
次に、いつもの方法で、牽引力特性を測定した。
4.0Volt では 60Km/h 程度の速度しか出ないので、0.5Volt アップして測定している。 また、モータ回転数から換算したスリップ率ゼロの場合の速度も「4.5M 」としてプロットしている。
速度特性の場合のように綺麗なデータとなっていなし、スリップ率ゼロのデータがやはりおかしい気がする。 制動領域でのデータに注目したいのに、駆動領域でのデータも変なのである。
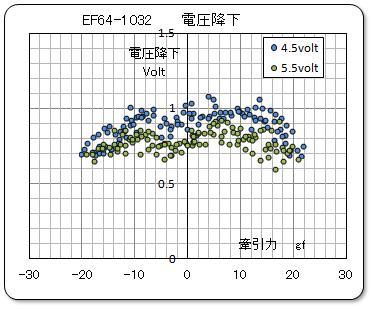
電圧降下量を見てみると、速度特性の時よりも少し増加しているが、傘形のパターンはここでも見る事が出来る。
やはり、牽引力によって接触抵抗値は変化していると考えるべきであろう。
次にモータの回転数を見てみよう。
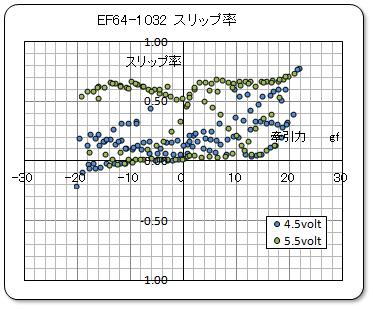
モータ回転数と車速の関係、および、スリップ率と牽引力の関係を右のグラフに示す。
やはり腑に落ちない!
モータの回転が2倍以上に跳ね上がっているとは到底思えないし、スリップ率のデータがこれだけバラツクのは、車輪とレールの関係の物理現象と考えるのは間違いであると断定出来るであろう。
しからば、測定方法が拙いということになる。
測定方法のどこかがおかしい!
あやしいのは、モータ回転数の計測値と睨んでいる。 速度特性と同様に tp/tt のグラフを取ってみても、 カウント完了の時間が早くなっているのではないかと思われるが、カウント中に点灯するサテライト・ユニットの赤色LEDや、カウント終了時に点灯するだいだい色LEDは、早くなったり遅くなったしているようには思えない。 速度は早ければ早く作動し、速度が遅くなるとそれに応じて作動している事が観察される。
すると、このサテライト・ユニット部分からArduino の間が怪しい? ノイズが乗って早期完了と誤動作している?
そう言えば、面倒なのでシールド線を使用していなかったし、パスコンなども挿入していなかった・・・・・・・・・・・。 もし、ノイズによるカウント終了の誤動作と考えるとつじつまが合って来る。
このノイズによる誤動作と想定した場合に、考えれれる対策として、
- シールド線を使用する。
- 0.1μFのパスコンを挿入する。
- ロジックについて、一回の信号でカウント終了と判断するのではなく、2回、3回と確認の上でカウント終了の判断を下す。
- カウント完了の信号を、ノイズが乗っても影響に少ないと思われる負論理とするために、プルアップ出力に変更する。
などが考え付くので、これらの対策を取ってみることにする。 その検討は次回に報告しよう。