
HOME >> 鉄道模型実験室 > 小型DCモータの調査 測定範囲の拡大
鉄道模型実験室 No.270 小型DCモータの調査 測定範囲の拡大
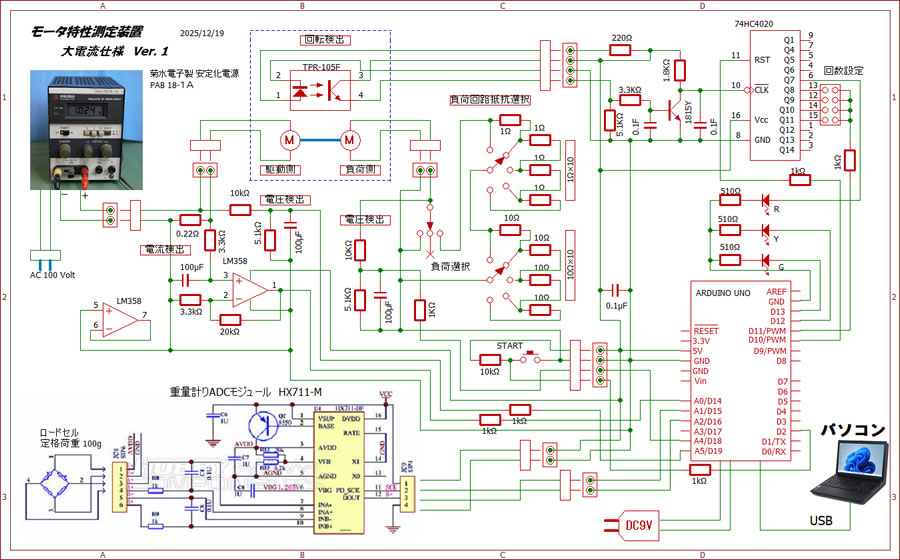
手持ちの小型DCモータについて、以前実施したようにモータ特性を測定することにした。しかし、測定範囲が広くなったので装置の改良から実施する必要があった。今回は測定範囲の拡大のために電子回路を見直し、大電流測定用のシールドを新規製作した。
■ 測定範囲の拡大
今までの電流測定の回路では、0.22Ωのシャント抵抗を使い、その電圧降下量をオペアンプで増幅して、Arduino のアナログ入力にインプットしていた。この構成では測定できる限界は約 300mA までであり、今回の小型DCモータの測定には対応することができない。そこで、オペアンプの回路を見直した。
この測定回路は、以前からいろいろ改良して来ました。最近の物では、R1 = 510Ω、R2 = 27kΩで、増幅率 = (R1+R2)/R1= 53.9 倍としていました。また、オペアンプの回路構成はいろいろあったが、自分はもっとも単純な回路にしているため、出力は 3.7volt で頭打ちとなります。 今回も同じ回路とし、R1 = 3.3KΩ、R2 = 20kΩとし、増幅率 = 7.06 倍とし、2.38Aまで測定できるように変更することにした。
今回の回路構成を下に示します。
現在のシールドの抵抗を取り去って新しい抵抗に取り換える作業は意外と難しいので、新規に制作することにしました。
■ シールドの新規製作
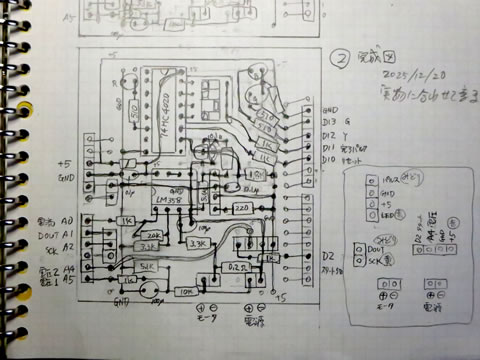
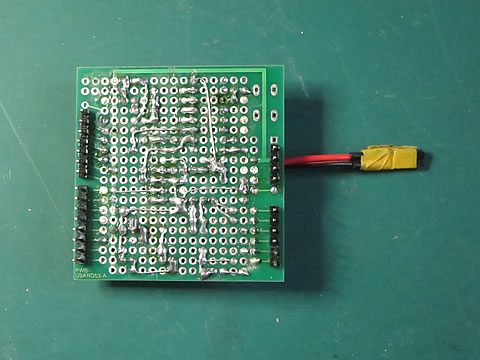
回路図が出来上がると、いつものように実体配線図を描きます。5mm 升目の用紙を使って書き込んで行きます。下左の写真。今回使用したボードは、以前何かに使っていた物で、これを再利用しました。スルーホールの両面基盤です。どこかのメーカ品です。
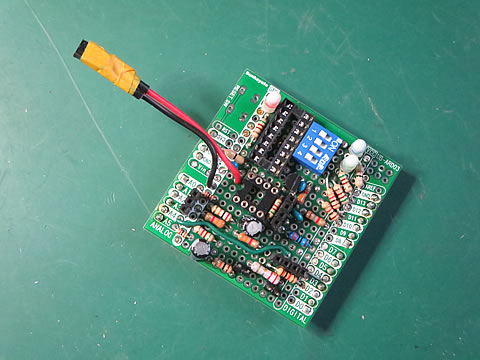
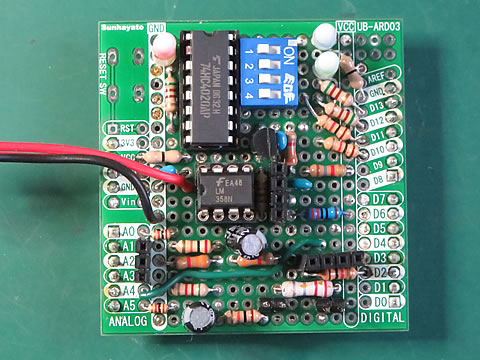
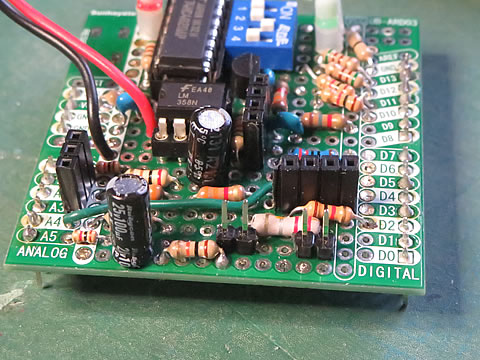
完成したシールドの表と裏側です。限られたスペースにびっしりと詰め込んでいます。赤黒のリード線が一本飛び出していますが、これはうっかり忘れていたロードセル用の電源回路の配線で、追加で工作したものです。
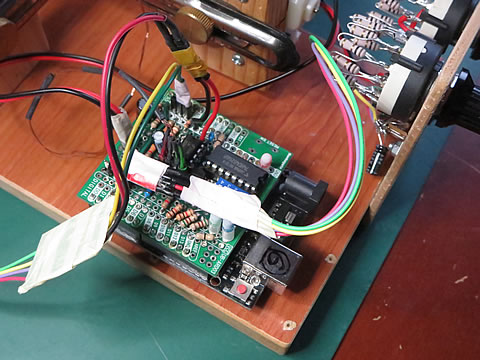
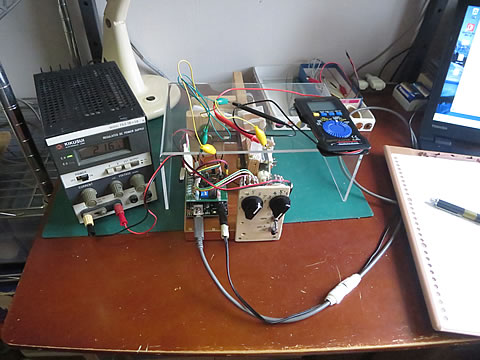
このシールドを測定台に固定しているArduino UNO の上に被せた状態を下に示します。
 .
.
■ 電圧1測定部と電流測定部の較正
シールドが完成したので、Arduino に取り付け、変更したI/Oポートの番号などを修正したスケッチを書込みました。そして、まずは機能テストを兼ねて駆動側回路の電圧と電流の較正を実施することにした。
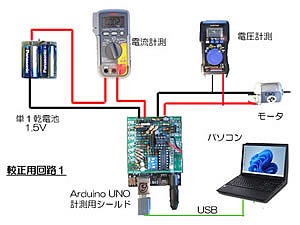
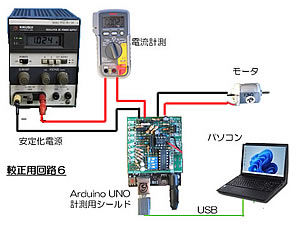
何時も使用している安定化電源は、max 1A までの電流しか流せないので、単一乾電池を使って電源とした。右のイラストに示すように、負荷としてはモータを使用し、電流と電圧を同時に測定できるようにした。Arduino からのデータはExcel に自動的に取り込むとともに、テスターの読みも手書きで書き込むようにした。
でも、この回路では較正作業が出来ないことがすぐに判明した。それは、乾電池の端子では 1.5volt もある電圧がモータ端子では 0.3〜0.4volt しか出ていないのである。その原因は、回路途中のの電圧降下量が大きくて、充分な範囲での較正作業が出来ないと判断したのである。
電流測定用に使用したテスタの大電流用レンジでの電圧降下が大きいこと、そして、モータの内部抵抗が小さいのに、シャント抵抗の値が大きすぎる事などが考えられた。
 .
.
■ 電圧1測定部の較正
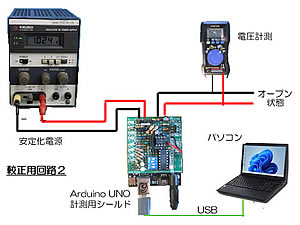
電流を流すので電圧降下が生じるのだ。そこで、負荷をオープン状態にして測定すれば、電流ゼロなので電圧降下はゼロとなります。
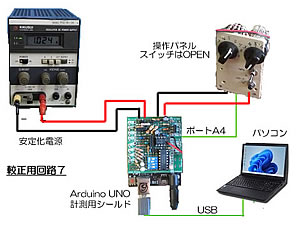
すると、広範囲な電圧の較正が可能と判断して、必要な電圧範囲が充分に取れる安定化電源を使用して、駆動部の電圧1の較正を実施した。
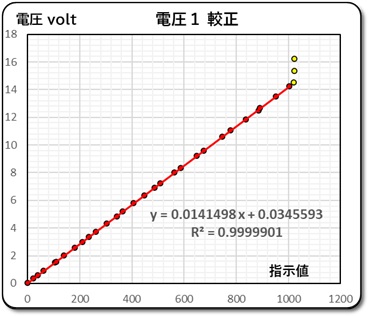
また、パソコン側の処理は、電圧値だけを送信するようにし、そのデータをシリアルモニタにて表示させるように簡素化しました。電源のメータの読み、テスタの読み、モニタの読みをそれぞれメモしておき、最後にExcelにて整理しました。この時の測定回路を上に、測定結果を右に示す。
Arduino のアナログ入力は 0〜1023 までなので 14.0volt が限界ですね。較正値は、
y = 0.01415x + 0.035
となり、今までの回路と殆ど同じですね。即ち、回路機能は合格と判断しました。 また、電源のメータの読みとテスタとの読みの差は、0.2volt以下だったので同じデータと判断して処理しました。 測定時の状態を下に示します。
■ 電流部の較正
 .
.
 .
.
次に電流測定部の較正を実施しました。分岐の無い回路にすれば回路中の電圧降下があっても流れる電流は同じなので、左のような回路で実施しましたが、モータによるデータの変動が大きく、電源のメータやテスタの表示を読み取ることが出来ませんでした。
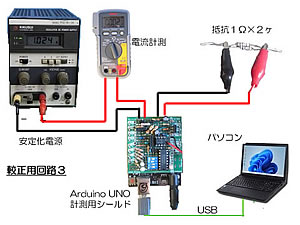
そこで、今度は右に示すように、モータに替えて 1Ωの抵抗を2ヶ並列にした 負荷に変更して測定を実行しました。
しかし、これでも思うような較正作業が出来なかったので、思い切ってシャント抵抗値を小さくすることにしました。
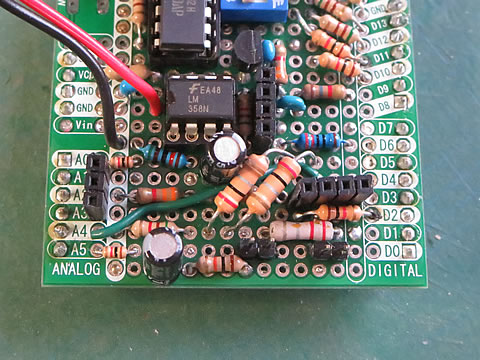
このための代替えとなるような手持ちの抵抗部品が無かったもで、0.2Ωの抵抗を2個並列で取り付けることにした。この部品を基板の中のスペースを探して無理やりに取付ました。下左が取付前で、右が取付後です。
 .
.
電源としては安定化電源を使用しましたが、1.0A が限度でした。
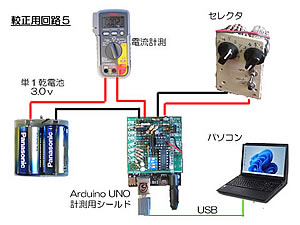
このため、 電源を単1乾電池に変更し、 負荷側を新しく工作した操作盤のセレクタを負荷としました。回路を右に示します。
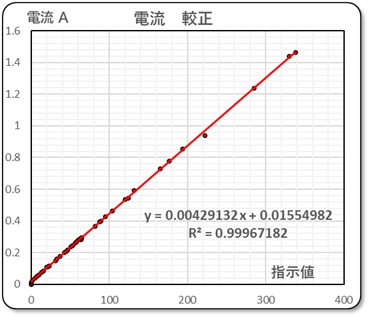
上記の測定値と合わせてデータを整理した結果を右のグラフにしめします。較正値は
Y = 0.0042913x + 0.0156
です。単位はAです。
オペアンプの関係抵抗は変更していませんので電流小さい範囲での精度は低いと思われます。でも線形が確保されており、大電流用としたのでこの状態で使用することにしました。
オペアンプの限界は、3.7volt なので、デジタル値にすると 757 が限界です。これより、3.2A まで測定できるようになりましたが、少しやり過ぎましたね。
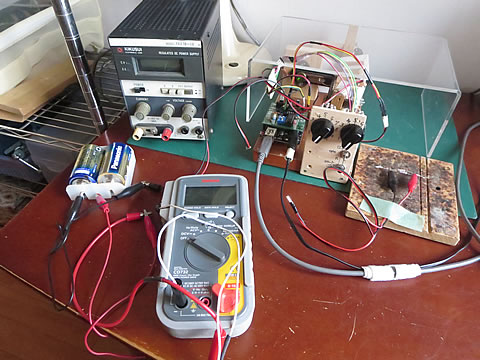
測定時の状態を下に示します。
 .
.
■ 電圧2の測定
負荷用モータの電圧測定の較正を実施しました。電源は安定化電源を使用した。
ただし、回路構成は、駆動用モータと接続するリード線を負荷側のモータの負荷回路と接続するようにしました。
そして、電圧1の測定と同様に、その先は選択スイッチをオープン状態にしています。このため、メイン回路では電流は流れませんが、電圧測定部の回路には電圧がかかるため、わずかに流れます。
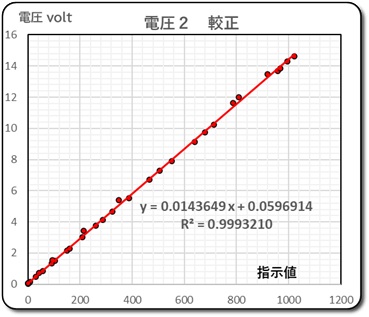
シリアルモニタと電源電圧の値をグラフ化したものを右にしめします。較正値は
y = 0.0014365x + 0.0597
となります。電圧1とほとんどおなじですね。
 .
.
四苦八苦しながらも、新しい回路の較正が無事完了しました。
********************************************
次回は、モータ間のジョイント連結方法について報告しましょう。
2026/1/7