
HOME >> 鉄道模型実験室 > スリップ率の実体を捕える
鉄道模型実験室 スリップ率の実体を捕える
■ はじめに
モータを搭載した動力車のモータ回転数を測定したいとの熱意で、ここまでいろいろ苦労してきたが、やっと光が見えてきた。 何とか納得がいくデータを取ることができたので、その内容を報告する。
Nゲージ鉄道模型の動力車は、一般的にはモータと動輪はウォームギヤや平歯車で連結されている。 このため、モータと動輪は、ギヤ比を介して1対1で対応しているが、車輪とレールは何らかの滑りが発生するので、動輪とレールの間には1対1の関係が崩れてしまう。 そこで、モータの回転数と車体の速度を比較する事によって、動輪のスリップ状態を観察する事が出来る。 即ち、走行中のモータ回転数を測定する事によって、期待していた動輪のスリップ状態(スリップ率)がやっと測定出来るようになったのである。
■ 電気機関車 EF64-1032号機の測定
先回の報告のなかで報告したように、測定方法に問題点があったので、ノイズ対策などの改良を実施した結果、納得に行くデータを得る事が出来た。
◆ 牽引力特性の測定
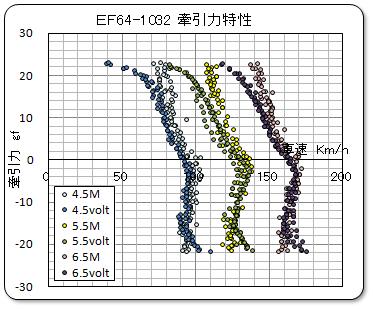
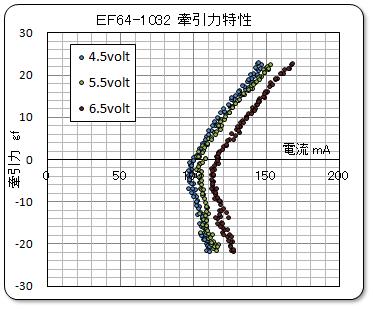
新たに測定した牽引力特性を右に示すが、綺麗なデータが取れている事がわかるであろう。
牽引力と車速のグラフには、モータ回転数から計算したスリップ率ゼロの場合の車速を “M” のマークを付けてプロットした。
すると、駆動側(牽引力がプラス側)では、モータ回転数が牽引力に応じて低下して行くが、途中からスリップが大きくなり、車体の速度は落ちていくのに、モータの回転数は、今までの延長線上になっている。 これは推定通りの動きである。 次に制動側(牽引力がマイナス側)では、モータの回転数はさほど変化しないし、スリップ領域に入っていってもその動きは殆ど変化していない。 これも興味ある事実である。
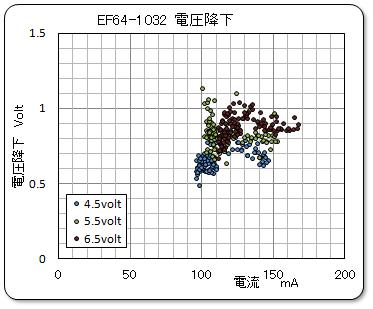
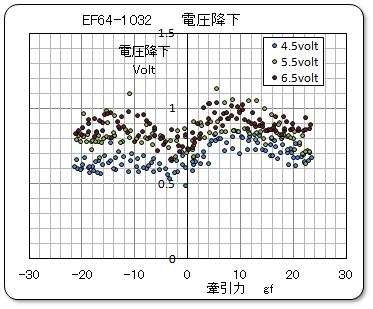
次に電圧降下の様子を見てみよう。
このデータは先回と様子は同じであるが傘形のパターンが崩れている。
電圧降下と牽引力の関係は、傘形パターンになると言う先入観はリセットして置く必要がありそうだ。
まだまだ “N 増し”が必要のようである。
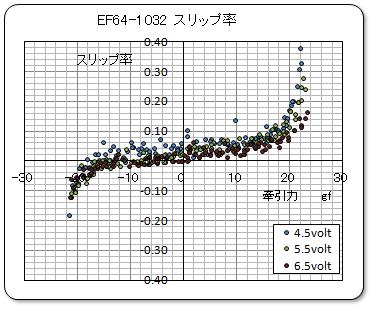
次にスリップ率のグラフを見てみよう。
やっと納得の行くデータが取れたぞ! と叫びたくなるようなグラフである。
牽引力が駆動側では、数%のプラス、制動側では数%のマイナス側、そして牽引力の限界であるスリップ領域に近ずくにつれてスリップ率は大きくなる。 勿論、制動側はマイナスに大きく落ち込む。 これが想定していたスリップ率のパターンである。
我が測定方法では、モータ回転数や車速の測定において、数%程度の誤差は覚悟している。 従ってその測定値を引き算したスリップ量の計算値には、当然ながら数%の誤差が出るのは当たり前であると考えている。 プロット点もそれなりにバラツイテいることも納得であろう。 この事を考えてグラフを観察すると、上記の理想的なパターンがピッタリと当てはまると判断出来るのではないでしょうか。
駆動側と制動側に僅かな段差があること、これはゼロ点が少しずれていると考える事も出来る。 測定方法によるドリフトかもしれない。 1〜2%下にドリフトしておれば理想通りとなるが、1〜2%とは、100のパルスをカウントする時に、1〜2パルス以下の誤差しか許されない事である。 そのカウントのタイミングを考える時に、これは我が測定方法では不可能と言わざるを得ないのである。
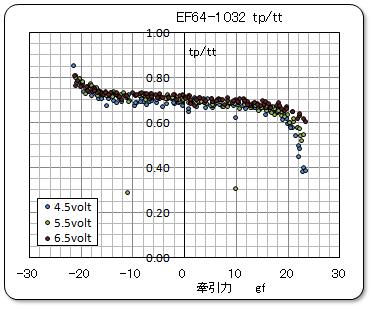
右のグラフは、車速測定ゲートの通過時間 tt msec とモータ回転数パルス128パルスのカウント終了時間 tp msec の比率である。 スリップ率ゼロの場合は 0.725 である事を念頭において観察すると、動力車の車速とモータ回転数の計測が安定していることが判断できる。
次回の報告は、ノイズ対策などの改良対策の内容を報告しよう。 また、スリップ率がそれなりに測定出来るようになったので、トラクションタイヤの有り無しや、トラクションタイヤの位置の違いなど、面白そうな実験も出来そうである。