
HOME >> 鉄道模型実験室 > モータ端子電圧の波形の観察
鉄道模型実験室 モータ端子電圧の波形の観察
■ はじめに
オシロスコープを使って、モータの端子電圧の波形を観察した。 目的は、その電圧波形からモータ回転数を計測出来ないか検討するためである。 結果として、自分の技術レベルでは無理で有る事がわかった。
■ いきさつ
走行中の動力車において、モータの端子電圧とモータの回転数を測定すると、動力車での電圧降下量と動輪のスリップ率を測定する事が出来るようになった。 これによって新たな知見を得る事が出来たが、測定出来る動力車には制約があった。 それは、モータの回転数を測定するセンサの問題である。
回転数を測定するセンサとして反射型フォト・センサを使用したが、回転部分のマーキングやセンサの設置場所の制約があり、今まで測定してきた電気機関車以外は、この方法での測定では無理であった。 当初は回転子の磁気変化をホール素子で測定しようとしたが検出出来なかったし、光ファイバが使えないかとも考えたがアイディアが出なかった。 モータの逆起電力を測定する方法では、制御回路が必要な様子なので、この方法も可能性は無理と判断した。
そこで、ネットのどこかでモータの電圧変化からパルスをカウントして計測出来るとの話を思い出して、本当に計測できるのか検討してみる事にした。 そのためには、電圧波形を観察するオシロスコープが必要であり、この高価な測定機の中古品をヤオフクで当ってみるも、手が出せなかった。 もっと簡単な道具は無いものだろうかと検索してみると、なんと、Arduino を使った簡易型オシロの紹介記事を見つけた。 早速、試しに使ってみると、簡単に モータ端子電圧の波形を観察する事が出来たので、いろいろ実験観察を行った。
■ 簡易型オシロのインストール
簡易型オシロとして紹介されていたのは、九州工業大学の 「Arduino 簡易オシロスコープ」 である。 このサイトから、Arduino 用とProcessing 用のスケッチをダウンロードして、Arduino とProcessing を走らせると、簡単に作動させることが出来た。 この手順を下に示す。
- Arduino をインストールする。・・・・・・これは既に実施済みである。
- Processing のソフトを指定のサイトからダウンロードしてインストールする。 ・・・・・・・これも簡単であった。 32bit版を使用する。
- サイトのアーカイブをダウンロードして、Arduino 用と Processing 用の2つのスケッチを入手する。
- ブレッドボードに指定の回路を構成する。
- 簡単な測定台にモータ単体を固定し、測定回路と結線する。・・・・・・・・・測定台は「モータ特性の測定方法に関する小改善」で使用した台を流用した。
- Arduino を起動させ、 Arduino本体と PC を USB ケーブルで接続する。
- Arduino 用スケッチを Arduino本体 へ upload にて転送する。
- Processing を起動させProcessing 用スケッチを開き、 Run で実行する。
- Kyutech Arduino Scope の画面が表示され、スタンバイOK となる。
- モータを回転させて、波形を表示させる。・・・・・・・・Kyutech Arduino Scopeの操作は、いろいろ触っているとすぐに会得できた。
オシロの準備は問題なく、スムースに出来た。 こんなに簡単だとは思わなかった。 九州工業大学の方に感謝!
また、試運転中に、モータの回転状態を知る必要がある事に気が付き、その手段として反射型フォトセンサを使用することにした。 このセンサから得られた信号をオシロ上に表示すれば、モータの回転状態を知る事ができるのである。
 .
.
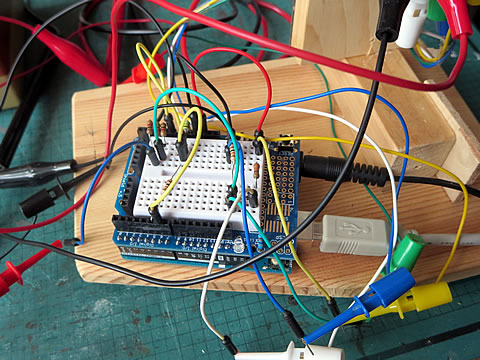
■ 実験装置
Arduino本体とシールドは以前に入手していたものを使用する。 Arduino は Uno R3 で、シールドはブレッドボード付きプロトシールドである。
モータの回転数センサも測定車両に使用していたセンサの予備品を使用する。 オムロン製の反射型フォトマイクロセンサ EE-SY110 である。 電源はArduino の+5V を使用する。
Arduino の入力は max が +5V なので、分圧回路も構成した。 これらの回路を右の回路図に示す。 そして、これらをブレッドボード上で構成した。
モータの固定は、既存の測定を使用し、回転数センサも有り合わせの部材を使いセロテープで固定したが、取りあえずの試しの実験であるため、応急的な工作となっている。 回転数センサ用の反射マークは、モータのフライホイール部分に白と黒のペイントで、1回転当たり1回変化するように塗り分けている。
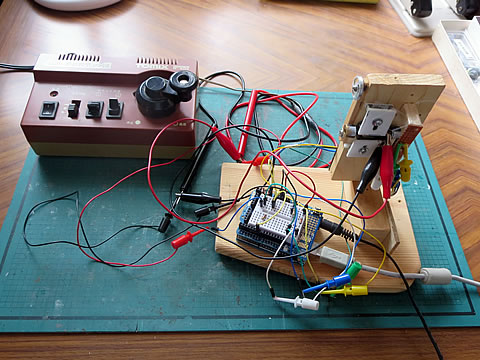
装置の全体を下左の写真に示す。 下右の写真はモータの取り付けと、配線状態である。
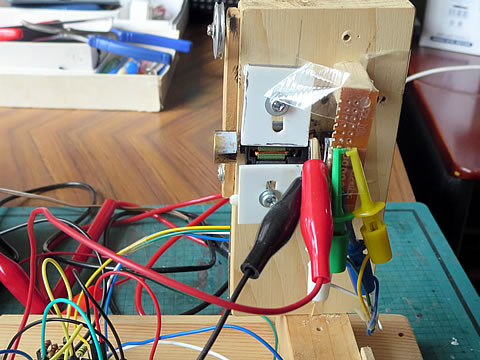
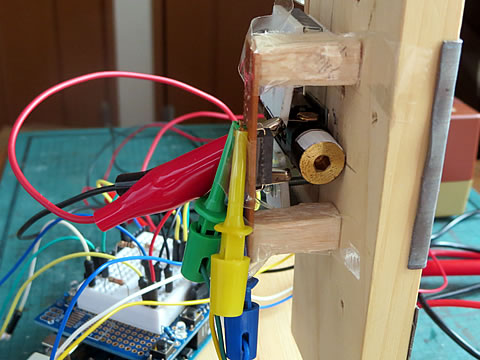
下左はモータ部分を横から見たもので、回転数センサの様子を示す。 また、右の写真は、Arduino本体とシールドで、コンパクトに収まっている。
■ 実験結果
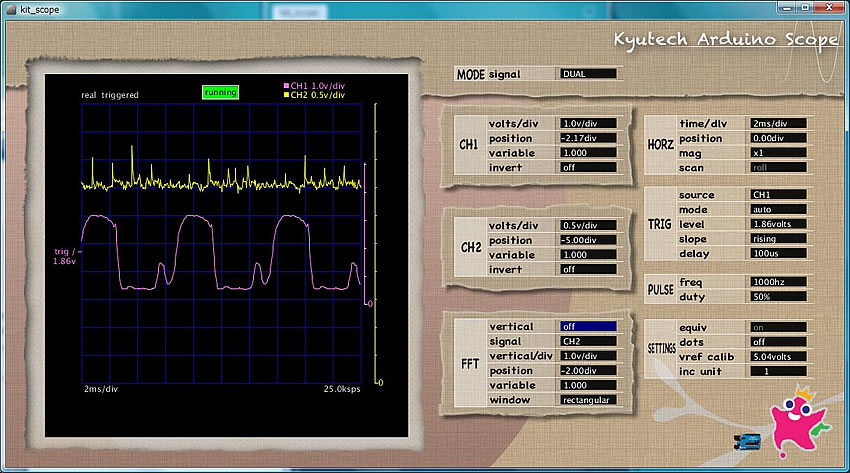
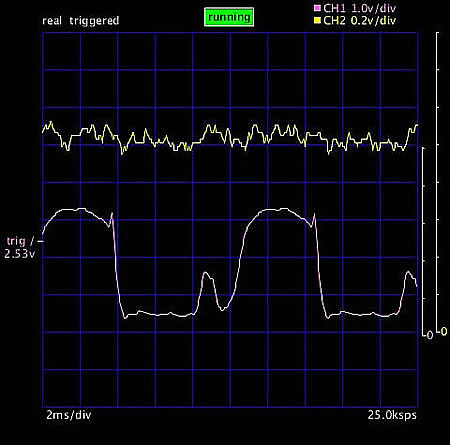
まず、オシロの表示状態を紹介しよう。 パソコンのPrtSc (プリントスクリーン)を用いて画像を取り込んだものである。
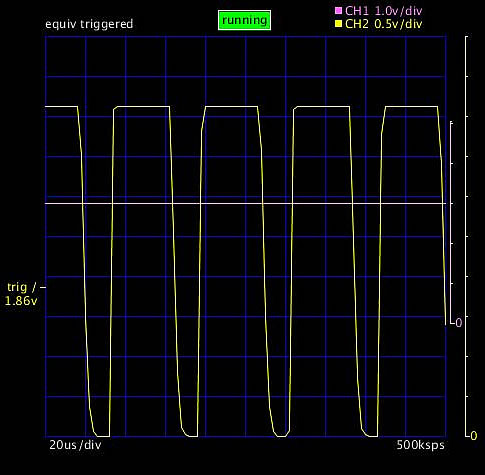
CH1 で表示している回転パルスは、白ペイントの明るさに従ってパルス状に検出されているが、綺麗なパルスでは無いものの、これでモータの回転情報を充分に知る事ができるので、波形整形はしない事にした。 スイープのトリガは、TRIG欄を使って、電圧の上昇時点に設定している。 水平方向は、HORZ欄で設定されるが、表示は2ms/div にしているので 1目盛りが 2msec である。 表示されているパルスのサイクルは、3.5 目盛なので、3.5×2 = 7msec で一回転となる。 回転数に直すと、 8,570rpm と計算される。
モータ端子電圧の波形は、CH2 を使用しているが、縦のスケールは、0.5v/div にしているので、7目盛り、即ち3.5Volt の状態で有る事を表示している。 そして、小さな波が発生していることが分かる。 この波形を観察してモータの回転数の情報が得られないか検討するので、今回の実験の目的である。
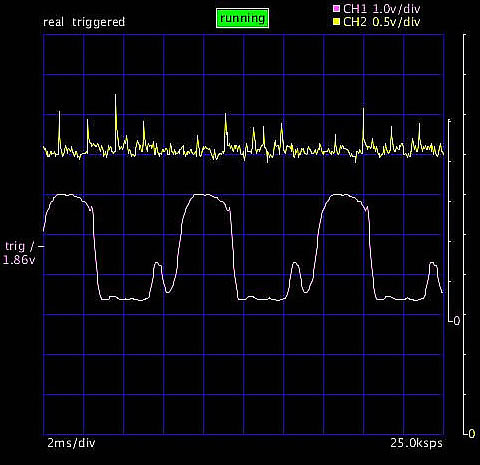
◆TOMIXのパワーユニットN-401を使用した場合
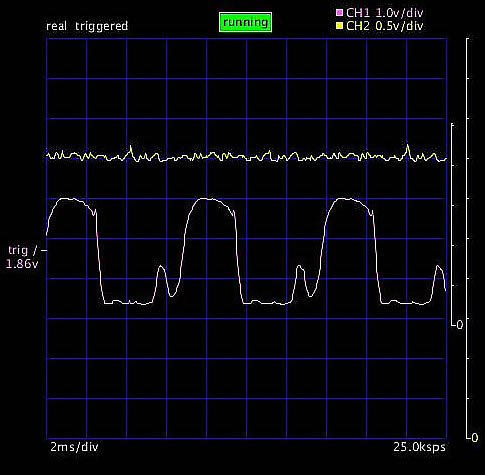
モータの電源としてTOMIXのパワーユニットN-401を使用した場合のモータ端子電圧の波形を下左に示す。 電圧は3.5Volt の無負荷状態である。 比較のために、菊水電子製の安定化電源 PAB 18-1Aを使用した場合の波形を下右に示す。 パワーユニットN-401の場合に発生していた小さな脈動は綺麗に消えており、まさしく “安定化している” 状態である。 同じモータを回転させているのに、電源のタイプによってこれほど劇的に変わるとは驚きである。
この実験を始めた当初は、こちらの電源を使って実験していた。 そして、モータの脈動波形がなかなか現れてくれないので実験を諦めるところであったが、電源を変えてみて、初めて気が付いたのである。 電源ユニットから直接モータ端子に電力を供給しているため、モータの変動要素を電源ユニットの対応能力によって吸収し、その結果として脈動具合が表れているのではないかと推察する。
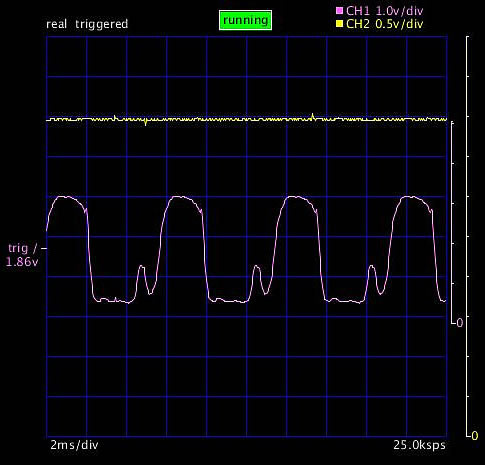
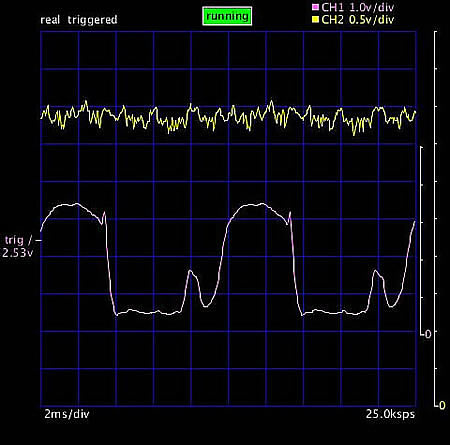
そこでパワーユニットをN-401に戻し、今度はローパスフィルタを通して観察した。 CとRを用いた簡単な回路を通し、モータの回転数情報を取り出そうとするものである。2P5S のモータの場合、一回転当たり5回の変動があるとすると、モータ回転数を 20,000rpm まで測定しようとするならば、約 1.7KHzの変動が有るはずである。 このためこの周波数まではパスして、それ以上の雑音的変動をカットする狙いである。
ネット上での参考サイトを見ながら、10KΩの抵抗と 0.0033μF のコンデンサを使って、fc = 4.8k Hz のローパスフィルタを構成して、実験した結果を下左に示す。
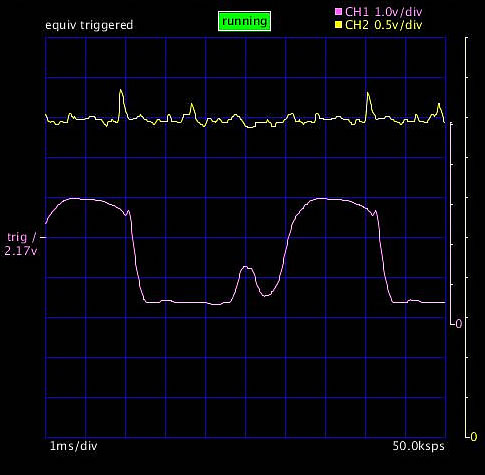
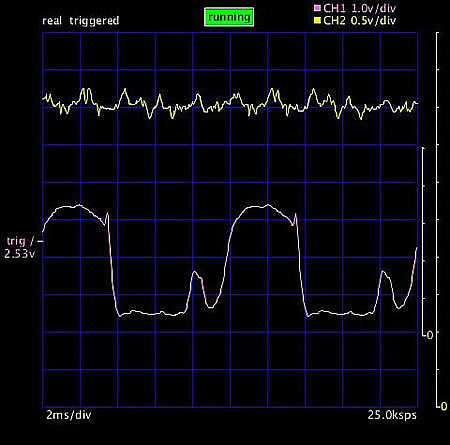
細かい雑音は綺麗に消えたが、回転数に関係する脈動はハッキリとしない。 そこで横のスケールを2倍に拡大した状態を上右に示すが、やはりはっきりしない。
 .
.
◆TOMIXのパワーユニットN-1000-CLを使用した場合
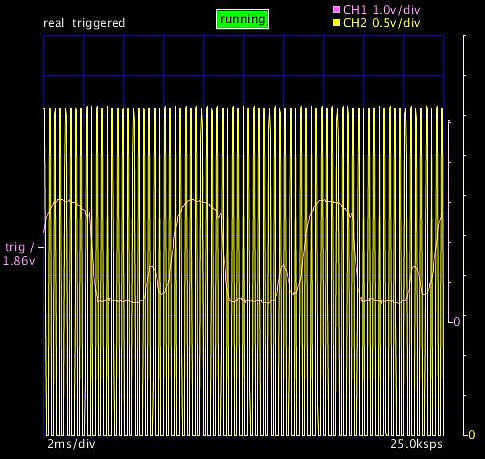
実験を少し寄り道して、TOMIXのパワーユニットN-1000-CLを使用した場合の波形を観察することにした。 このユニットはパルス制御しているとのことであるが、実際の波形を見て確認してみた。
その時の波形を右に示すが、見事なパルス波形である。 電圧は12ボルトに達すると見込んで、12ボルト端子に接続した。 ピーク値は、8.2目盛であるが、0.5v/div であるので、4.1ボルトである事を示している。 そして、20Kと10K の分圧回路を構成しているので、実際の電圧は、4.1×3 = 12.3 ボルトとなる。 即ち、このパワーユニットは0と12ボルト間のパルス波形であることが分かる。
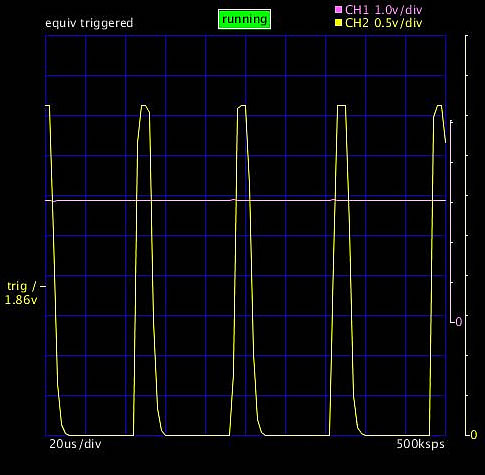
次に、この横の時間軸を拡大し、さらにパワーユニットのダイヤルを変えた場合の波形を下に示す。 パルスの周期は 2.2 目盛であるので、2.2×20μs = 44μs と読み取れる。 周波数に直すと22.7KHz となる。
また、ダイヤルを変えてもピーク値は変わらず、パルス幅が変化するだけであった。 これがまさしくPWM 制御の波形であると感心して見ていた。
■ 電流波形を見る
電圧の代わりに電流を見てみる事にしよう。 電圧の場合は電源の形態によって影響されるので、電流の場合にはその影響が少ない(無い?)と考えたのである。 電流を検知する方法は、モータ駆動回路の途中に抵抗を入れて、その前後の電圧をオシロで観察した。
電源は電圧が安定している安定化電源 PAB 18-1Aを使用し、挿入する抵抗として50Ωの場合と12Ωの場合を観察した。 モータの電流は無負荷状態のため、およそ80mA 前後であるので、50Ωの場合では、4ボルトの電圧降下が発生する事になる。
50Ωと4.8KHzのローパスフィルター
 |
50Ωと1.8KHzのローパスフィルター
 |
50Ωと0.5KHzのローパスフィルター
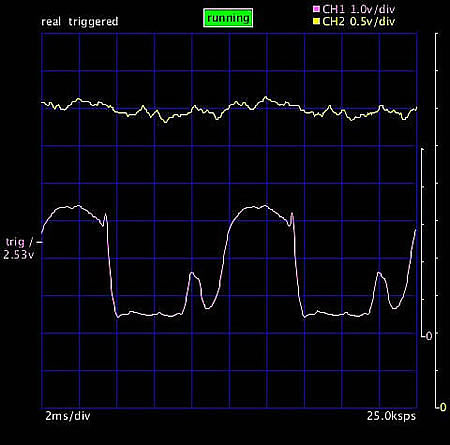 |
12Ωと1.8KHzのローパスフィルター
 |
電流波形で観察すると、安定化電源の場合でも脈動波形を観察出来る事が分かった。 電流であれば、走行中の車両上で無く、電力を供給している地上側(固定側)でも観察できるので測定装置は容易となるが、上記の様な電流波形から回転数情報を取り出すのは困難なような気がする。
■ 考察
以前から欲しいと思っていたオシロスコープが簡単な方法で使えるようになったことで、大いに興奮した。 しかし、回転数に同期した脈動波形が得らるのではと期待したモータ波形には少しがっかりとした。 どう見ても ”回転数情報を含んだ波形” ではなくて ”雑音波形” としか見えないのである。 やはり、モータの回転数検知は、確実な回転センサを使って測定するしか無さそうである。