
HOME >> 鉄道模型実験室 > 電圧と電流の波形を観察する
鉄道模型実験室 電圧と電流の波形を観察する
■ いきさつ
先回、簡易型オシロスコープを使ってモータの端子電圧の波形を観察した。 目的は、その電圧波形からモータ回転数を計測出来ないか検討するためである。 電源の方式によって、波形が変わることや、電圧よりも電流の波形の方が脈動が大きいことが分かった。 しかし、どう見ても ”回転数情報を含んだ波形” ではなくて ”雑音波形” としか見えないのである。 結果として、自分の技術レベルでは無理で有る事がわかった。
しかし、長年の懸案であった「波形を見ること」が実現出来たので、もう少し色々な観点から波形を観察してみる事にした。
 .
.
■ 実験装置
先回の観察により、電圧波形よりも電流波形の方が脈動が大きく出ることが観察された。 そして、電源の方式によって、脈動波形の様子が異なることも分かった。
そこで、電圧波形を電流波形を同時に観察してみることにした。 電流は回路中に抵抗を挿入してその電圧降下量から測定する事が出来るが、オシロへの入力電圧を高くするため、数Ω〜数十Ωの抵抗が必要となる。 すると、これによる電圧降下量が電圧測定値に影響及ぼすので、電圧測定のマイナス側の設定が問題となる。
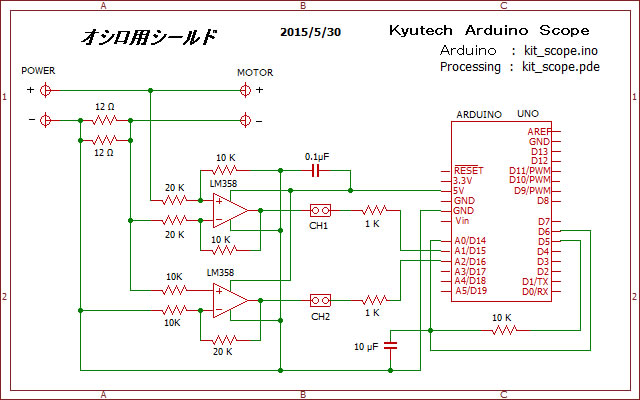
マイナス側の Arduino との接続はGND端子のみなので、電圧測定と電流測定のマイナス入力は共通にする必要がある。 そこで、オペアンプの差動増幅機能を使ってせつぞくすることにした。 さらに、Arduino への入力電圧のMAX は5ボルトであるので、その調整を含めて、左の様な回路を作ることにした。
そして、オペアンプを介さずに、直接 Arduino に入力出来る回路も細工した。 回路図に示すチャンネル1(CH1)で電圧波形を、チャンネル2(CH2)で電流波形が観察できるようにした。
そして、これらをブレッドボード上で構成した状態で実験を開始した。 もし、この回路が有効であれば、シールドとしてユニバーサル基板を使って組み立てることにする。 装置と実験の様子を下の写真に示す。
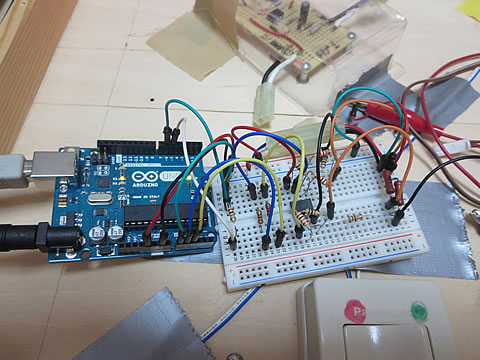
配線はゴチャゴチャしており、どこかでノイズを拾ってしまう恐れがあるが、気にしない事にした。
■ 電源方式の違いによる差
実際の車両を走らせながら、もう一度電源方式の違いを観察してみた。 走行させる車両は、たまたま近くにあったマイクロの8620形SL、18688号機を使用した。 軽い重り車両を牽引させ、測定台も少し傾斜して、登り坂と下り坂の違いも観察した。
供給電圧は、およそ5ボルト前後とし、モデルのスケールスピードの出具合によって適当に変化させている。 オシロでの表示はチャンネル1(CH1)を使用し、スケールの表示は、0.5 Volt/目盛にて表示している。 この時の電圧値は Arduino のアナログ入力値であるが、オペアンプの増減幅比率を換算して、実際の値として計算されるが、厳密な校正は実施していない。
電流値は、チャンネル2(CH2)を使用して表示しているが、モデルによって大きく異なるので、ほぼ中央部分にて表示されるよう、表示ゲインを調整している。 このため、画面に表示されたスケールを参考に読み取ってください。 また、ゼロ点はチャンネル1と2共に、底面をゼロ点にしている。
横軸の時間軸は、2ms/div 即ち、ひと目盛りが2m秒を標準とした。 これらのオシロの設定条件はオシロ画面に表示されるので、これを参照下さい。
◆ 安定化電源の場合
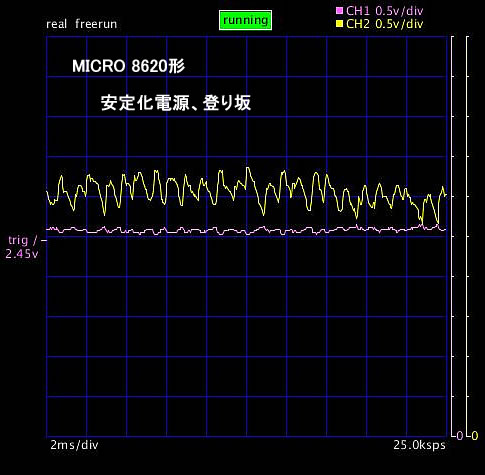
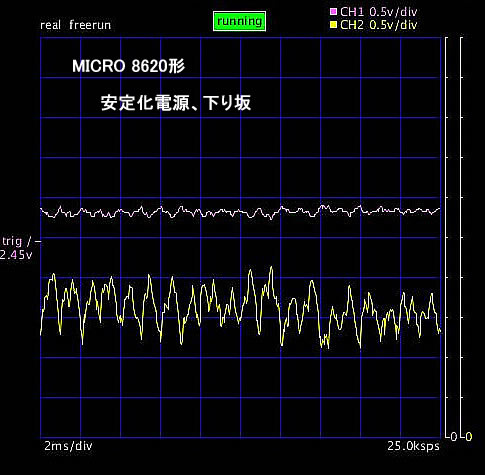
登り坂と下り坂では、当然電流値が異なるが電流脈動量は、下り坂の方が大きくなっているのは面白い現象である。 また、供給電圧値は一定のはずであるが、電流検出の電圧降下量が下り坂では小さくなるため、動力車に供給される電圧値はその分高くなっている。 そして、電流変化による脈動も影響して電圧の脈動となって表れている。 下り坂の電流脈動は、10目盛で20山発生していると読み取れる。 これは、1,000Hz になり、2P5S のモータであれば、 12,000 rpm の回転数と計算出来る。
しかし、登り坂では、山の形が崩れているので読み取り難い。 基本波としてカウントしづらいのである。
◆ TOMIX のN-401パワーユニットの場合
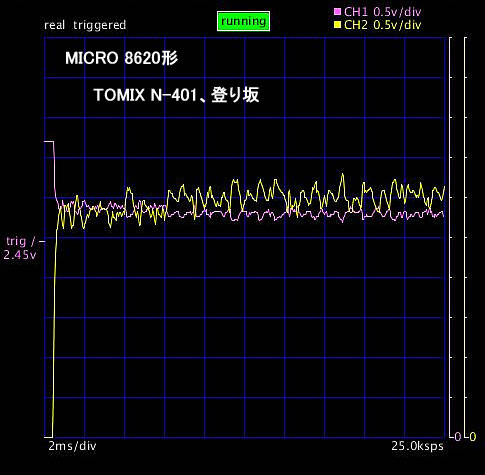
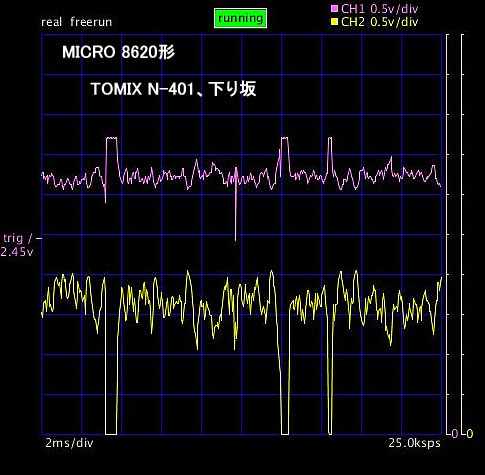
登り坂と下り坂の両方共に脈動波形は乱れており、電圧・電流共にノイズが多くなっていいる。 時々電流がゼロになっているが、パワーユニットの影響なのだろうか? また、3.7ボルト近くで頭が切れているのは、オペアンプの限界電圧である。 この電圧がオぺアンプの出力限界なのである。
◆ TOMIX のN-401パワーユニットの場合
PWM方式のパワーユニットであるため、0 - 12 ボルトのパルスで供給され、パルス幅が制御されている。 このため、ご覧の様な波形となっている。
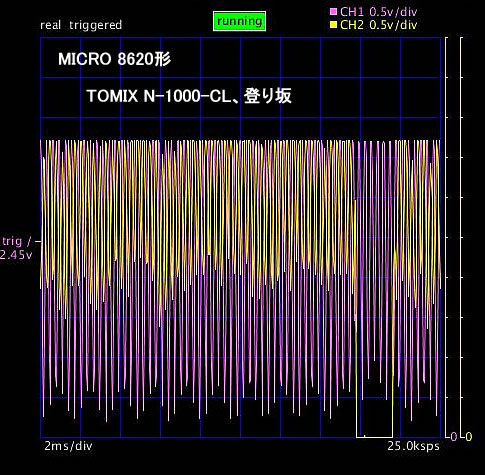
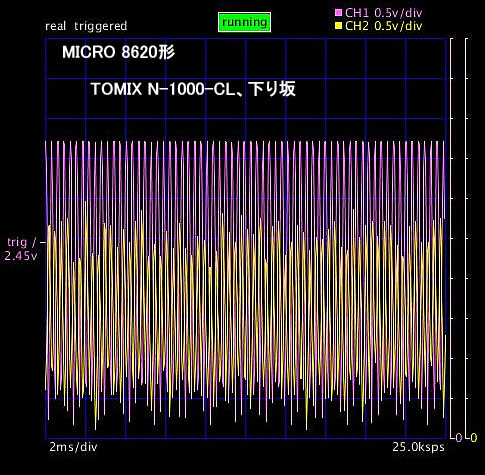

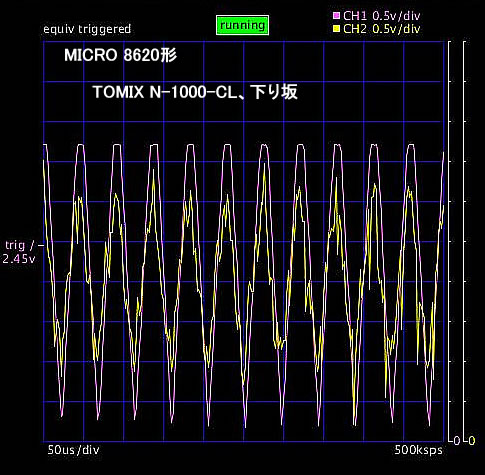
横軸のスイープ時間を短くした場合を上に示すが、これは、矩形波と言うよりも三角波に近い波形である。 上限が3.7ボルトで切れているのはオペアンプのせいである。
■ 動力車のモータの違い
次に、動力車のモータ様式の違いに注目してみよう。 電源は安定化電源を使用し、平坦路での単機走行状態で観察している。
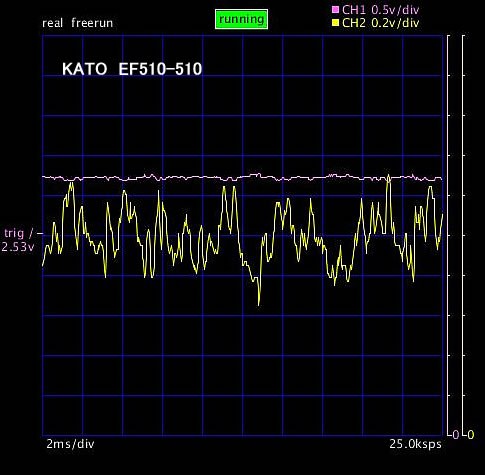
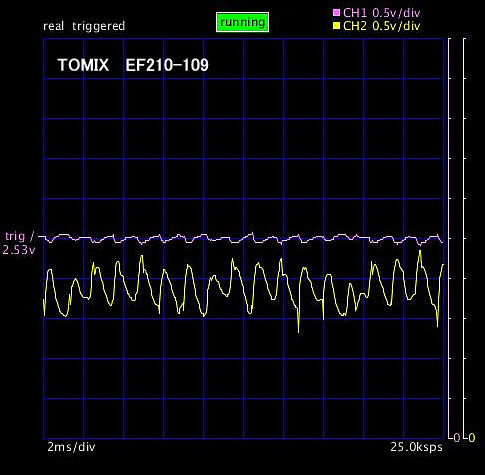
EF510 と EF210 の電流値は、その値に2倍の差があるが(表示ゲインに注意)、 EF510のノイズは大きく、回転数情報は読み取りにくい。 一方の EF210 では、回転数情報をなんとか読み取ることが出来そうである。
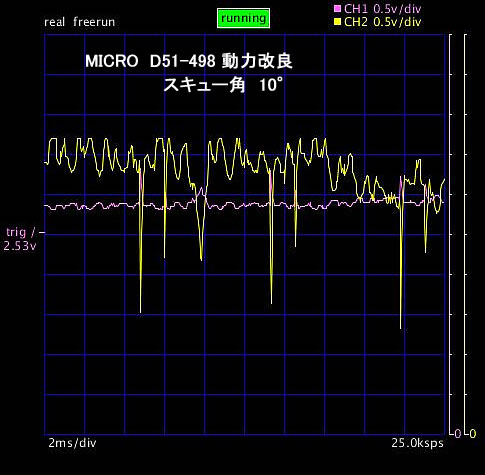
スキューのあるモータを使っている動力車を選定した。 コギングが少なくなると脈動成分も小さくなるのではないかと思って電流波形を見てみたが、その効果具合は良くわからなかった。 脈動が特に小さくなっているとは判断できないのである。
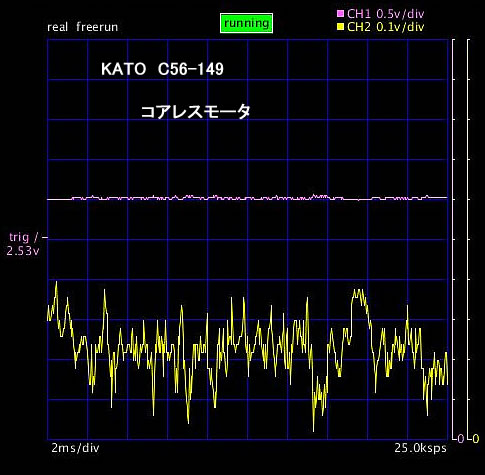
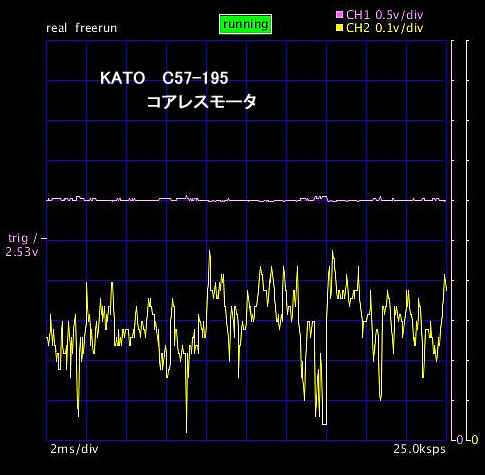
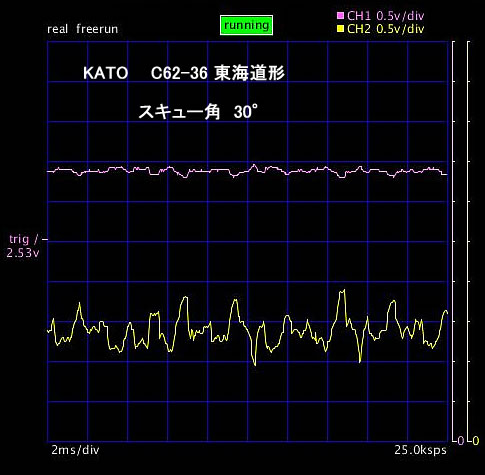
KATOのコアレスモータを使用した2機種を観察した。 電流値は小さくなっているが、脈動成分の比率は大きくなっているようである。 ノイズ成分と回転ムラ成分の分解方法が良く分からないので、ただ波形をポケーと見ているだけある。
■ まとめ
やはり、波形を見る限り、どう見ても ”回転数情報を含んだ波形” ではなくて ”雑音波形” としか見えないのである。 そして、電源の種類によっても、動力車のモータ形式によっても、色々なパターンが有りそうである。 もし、 EF210 のようなきれいな電流波形であったら、回転数情報を取り出せる可能性があるものの、残念ながら多くの車種は無理であるとの結論にしておこう。
次は、せっかくオシロと言う道具を手に入れたので、今まで使用していた計測装置の脈動状態を観察しておくことにしよう。