
HOME >> 鉄道模型実験室 > 電圧・電流測定ユニットの較正
鉄道模型実験室 No.176 電圧・電流測定ユニットの較正
先回は傾斜台の傾斜角を測定するユニットの較正作業を報告した。 今回は、電圧・電流測定ユニットの較正作業を報告する。
■ 電圧・電流測定ユニットの較正作業方法
測定方法は、机の上にて疑似回路を構成し、安定化電源で電流を流してユニットからの信号を受信し、テスターで測定した値と比較して較正した。 その様子を下に示すが、この作業は測定ユニットを測定台に装着する以前に実施していました。 報告が前後しています。
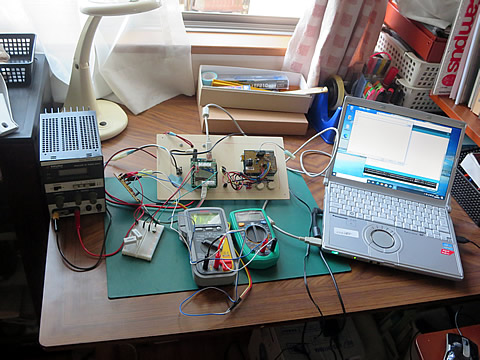
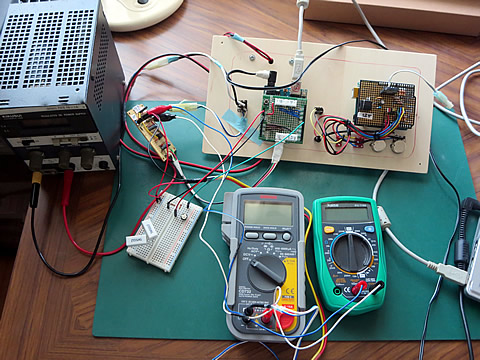
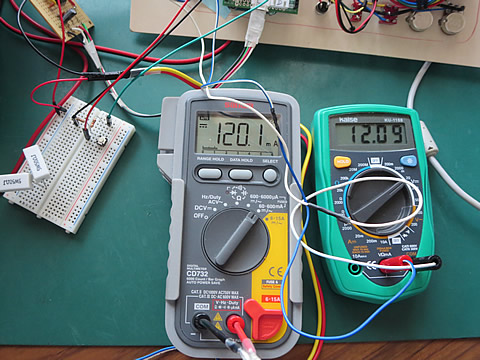
机の上の全景を上左に示し、測定回路部分を上右に示す。 操作盤に設置されているスイッチやArduino 、およびユニット間の接続線もそのまま使用しています。 測定ユニットからの信号はArduino で処理した後、ノートパソコンのUSBで受信し、シリアルモニタにて受信したデータを表示させています。
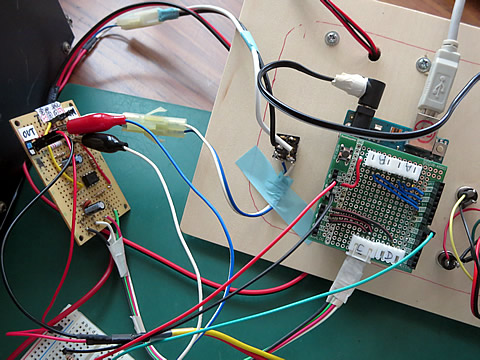
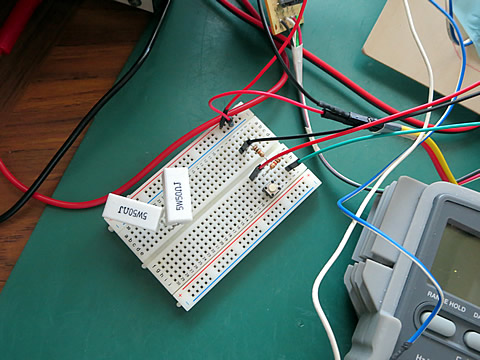
測定ユニットの配線状態を下に示す。 電圧チャック用の配線は、測定ユニットの電力線のプラス側とGND側に接続しています。 下右の写真。
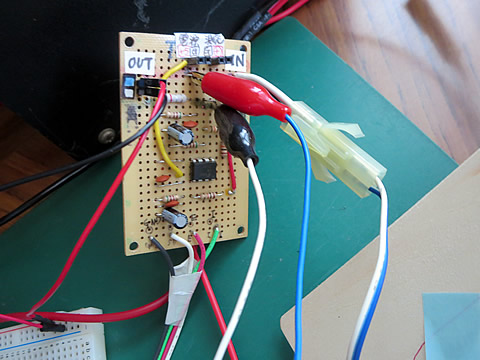
供給した電力を消費させて電流を発生させる必要があるため、負荷抵抗として固定抵抗を回路に挿入しました。 使用した抵抗は熱の発生を考慮して、50Ωのセメント抵抗を2個使用した。 下左の写真。 この負荷回路に電流チェック用のテスターを直列に接続するよう配線を実施している。 そして、電圧測定と電流測定用の二つのデジタルテストを使用した。 下右の写真。 負荷抵抗が100Ωであった状態なので、電圧が12V、電流が120mA の状態を示している。
このブレッドボード上に、Arduino から5V電源を引き、スイッチを使ってデジタル信号を送信するような回路を構成し、この押しボタン信号によって電圧と電流を計測するように簡単なスケッチを設定した。 こうすると、ボタンを押すごとにその時のデータがシリアルモニタに表示されるのである。
■ 測定結果
安定化電源の供給電圧を変え、シリアルモニタに表示データとテスターの読みをノートに書き込みながらながら測定を実施して行った。 また、途中からセメント抵抗をひとつに減らし、電流値が2倍になるようして測定レンジを広げた。 さすがにセメント抵抗は熱くなってきたが手が触れないように注意しながら作業を行った。
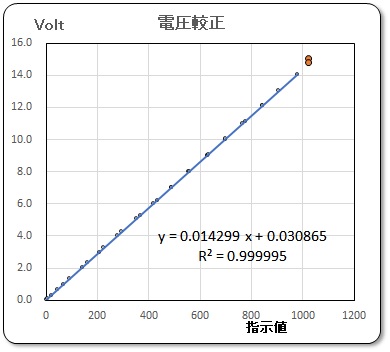
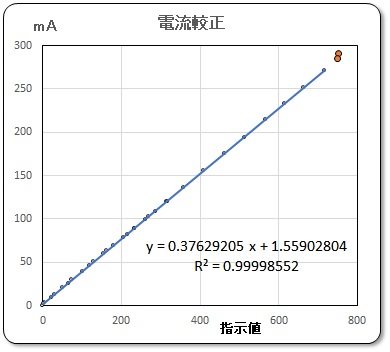
測定結果を上に示す。 縦軸の電圧と電流値はテスターの値であり、横軸の指示値とは Arduino から送信されてきたAD変換後のデジタル値で、0〜2023の値である。 また電流値は途中でオペアンプを使って増幅しているため、その限界は735近辺である。
ここで、赤色のプロット点はArduino とオペアンプの測定限界を超えていると判断した領域で、別の測定グループとして表示している。 これは較正値を求める時に実施する近似式に含まれないようにするための配慮である。
測定されたデータを線形で近似した時の様子とその近似式をグラフ上に表示させている。 決定係数R2 の値もほとんど1に近いので、テスターの値と測定ユニットの計測値はピタリと一致していると判断した。 そしてその近似式はそのままユニットの較正式と使用出来る事を示している。
また、この測定ユニットの中心部は何も手を加えていないので今までの較正値と変化ないはずであるが、「電圧・電流測定ユニットの不思議な振動」(2013/3/8)でのデータと微妙に異なっているのだが・・・・・・・。 測定方法など、今回の最新データの方が信頼度は高いと判断している。
なお、上記のグラフでは近似直線はプロット点の少し下側に表示されているので、近似線とプロット点がズレているように見えるが、これはパソコンの画面表示上の問題であって、パソコン上で表示を拡大して行くとピタリと一致していることが確認出来ている。
■ 測定専用台車の確認
測定に必要な専用台車について、その重量を測定した。 台車はカプラーがアーノルドとカトーカプラを用意しているのでそれぞれの台車単体も測定しておいたが、カプラーによる変化はなく、3台の台車はそれぞれピタリと 2.0 グラムであった。


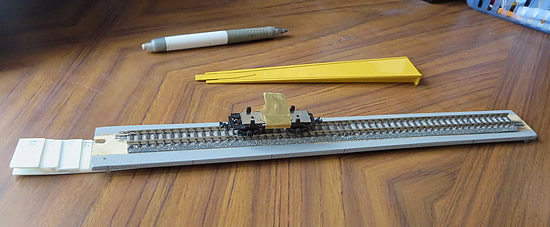
また、この専用台車の走行抵抗を上のような道具で測定した。 自重によって動き出す傾斜を求めて走行抵抗とした。 結果は、0.095 グラムで、0.1グラムとして計測時に加算することにした。
■ 測定ゲートの較正
測定ゲートでの速度計測の較正は、その方法が無いので計算値を信用することにした。 計算値は、測定ゲート間の距離とその通過時間で計算されるので、まず、測定ゲートの距離を測定した。
手前と奥の測定ゲートに於いて、INとOUTのピンホール距離は、金尺で測定して 100.0mm であった。 測定誤差は0.5mm 以下と考えるので、1%以下の誤差となる。 また通過時間はArduino の時間誤差なので、これも信用するしかないが、1%以下の誤差である事は確かであろう。
よって、
速度 V = 54,000 / tt [ Km/h ]
で計算される。 ここで、tt は通過時間の測定値 msec であり、速度 V はNゲージでのスケールスピードである、
以上で較正作業が完了したので、データ処理のためのExcelデータを作り直しておこう。
2020/10/4 作成