
HOME >> 鉄道模型実験室 > モータドライバとPWM制御 他のドライバ
鉄道模型実験室 No.189 モータドライバとPWM制御 他のドライバ
コアレスモータをPWM制御で駆動すると、デューティ比と車速の関係がなぜ非線形になるのかと言う疑問に対し、こだわり屋の実験室長は、ショットキーバリヤーダイオードを持ち出して来て実験してみると、思惑とは違った結果となり混乱してしまった。 そこで、他のモータドライバの場合も観察することにした。
■ TOMIXのパワーユニットの場合
以前、PWM波形を観察したTOMIX製パワーユニットN-1001-CL を使って、先回と同様にコアレスモータ搭載車のチビ凸用動力ユニットを走らせた。
今回はモータドライバはパワーユニットに内蔵されているので、ショットキーバリアダイオードだけをブレッドボードに差込み、その前後の電圧を取り出している。

 .
.TOMIXのパワーユニットの場合は、上流側の波形が乱れていない事が分かる。 でも速度特性は非線形なのである。 何故なのだろうか?
■ 東芝製モータドライバTB6612の場合
いろいろなケースを観察するのもひつようであると考えて、何度も使用しているもう一つのモータドライバとして、東芝製のTB6612も観察した。
 .
.
このモータドライバは、上流側の波形が乱れていないのである。
波形としては自分の思惑どうりの形をしているが、しかし頭の中は混乱して、整理が付かないのである。 何故それぞれの波形は異なるのか、非線形になる手掛かりは? やはり何か観察すべき項目が不足しているようである。
しかし、ROHM製のBD6231と東芝製のTB6612とは様子が異なるのは、内部の構成が異なるのではないかと考えて、製品のデータシートを開いてみた。 すると構成しているブリッジの制御方法がことなっている事に気が付いた。
■ 油圧回路と電気回路の違い
混乱する頭の中を整理する中で、油圧回路と電気回路の違いに気が付いた。 今更と思われるが、今回のブリッジの作動を考える時、その違いを実感したのである。
油空圧系では圧力と流量があり、電気系では電圧と電流があります。 そして油空圧系ではピストンやシリンダといったアクチュエータによって、圧力が推力に、流量が作動速度に変換されるのです。 しかし、電気系では同じ考えが通用しません。 例えばDCモータの力(トルク)は電流に比例し、回転速度は電圧に比例するのです。 力系と速度系が逆転しているのです。
さらに、建設機械などに多用されている油圧シリンダーでは、油圧回路を封じ込めることによって油の移動を制限すると、即ち流量をゼロに封じ込めると大きな力でシリンダをロックすることが出来るのです。 油圧が確保出来れば力を発揮するのが油圧シンダで、流量はゼロでもよいのです。
しかし、DCモータの場合は、電気的にロックが出来るのだろうか。 電線を切断すると電流が流れないので、電線を巻いていないのと同じであり、モーターは自由に回転させる事ができるようです(本当かな?)。 油圧シンダの様に直線運動に変換するソレノイドアクチュエータの場合、電圧を掛けただけでは推力が出ません。 コイルがつながっていると電流が流れてしまいますので、電圧だけを掛けるためには途中で配線を切ってしまう必要がありますよね。 電流が流れて初めて力が出るのが電気の力ですので、油圧回路とは根本的に違っていることを認識した次第です。
自分はメカ屋で油圧サーボに携わったことがあります。 従って、モータドライバのようなブリッジ回路も抵抗なく理解出来るのですが、上記の様な違いに対してはウロウロしてしまいます。 油圧でのブリッジ回路は、4方弁やサーボ弁でおなじみであり、オープンセンタとクローズドセンタ、あるいはメータイン制御とメータアウト制御なども理解しているつもりですが、電気系であるモータドライバのブリッジ回路には四苦八苦です。 フリーホイール電流? 逆起電圧? 分かっていたつもりでも、ついつい油圧系と比較してしまって頭の中が混乱してしまうのです。
*************************************************************************
前置きが長くなりましたが、データシートを見ると、ROHM製のBD6231と東芝製のTB6612とは、ブリッジにおけるスイッチの制御方法が異なっているのが分かります。 これは、油圧でいうメータイン制御とメータアウト制御の違いに似ていますが、そう単純では無さそうです。 電気と油圧の違いなのでしょうか?
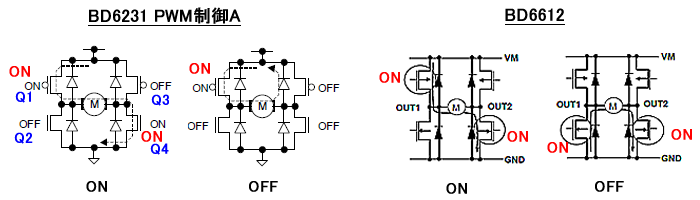
BD6231のPWM制御Aでは、ハイサイドスイッチのQ1は常にONで、ローサイドスイッチのQ4をON/OFF させてPWM制御を実施しています。 これは油空圧システムでいうメータアウト制御ですね。
一方のBD6612 ではローサイドスイッチのQ4を常にONさせておいて、ハイサイドスイッチのQ1をON/OFF させてPWM制御を実施しています。 これは油空圧システムでいうメータイント制御ですね。 でもOFFの時、ローサイドスイッチのQ2をON させていますが、油圧システムでは考えられない禁じ手なのです。 ローサイドスイッチのQ2とQ4を同時にON させるとシリンダの油圧ロックが外れ、ブームの重みに耐えかねてブームが自然落下すると言う危険な状態になってしまうのです。
でも、このデータシートの解説によると、ショートブレーキ状態となり、効果があるそうです。 油圧屋には分かりません!
****************************************************************************
そもそも、油圧屋にとってPWM制御そのものが悪なのです。 バルブの開閉などによる急激な圧力変化は、配管やシリンダなどの油圧システムに過大な負荷を掛け、破損などの危険を伴ないます。 また、小さな変化であったでも、ビリビリとした脈動となり、システムとしては不合格なのです。 例えば、ウオーターハンマー現象や、新幹線がトンネルで発する衝撃音も有名ですよね。 このために、先頭車両の形状をどれだけ苦労された事か。 PWM制御が有効であったり、ショートブレーキなる方式がゆうこうであったりと、電気屋がうらやましい!
次回は、もう一度、波形観察を再実施しますが、同時に動力車の速度も測定して、特性の線形性などを検討しましょう。
2021/5/18 作成