HOME >> マイコレクション > 電気機関車リスト > EH500 2
直流電気機関車: EH500 2


| 連結面間距離 | 173.5 mm |
車体重量(2モータ状態) | 126 gr |
| 台車中心間距離 | 前車の動輪荷重 | 30/32 gr |
|
| 後車の動輪荷重 | 31/31 gr |
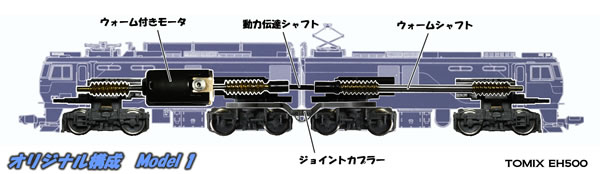
動力部の構成: オリジナル状態の構成
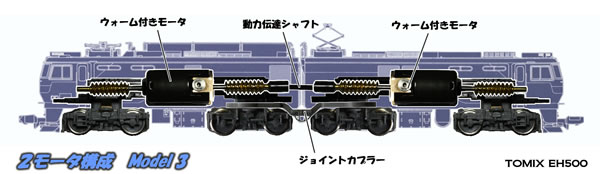
動力部の構成: 2モータ化した状態の構成

HOME >> マイコレクション > 電気機関車リスト > EH500 2
| 連結面間距離 | 173.5 mm |
車体重量(2モータ状態) | 126 gr |
| 台車中心間距離 | 前車の動輪荷重 | 30/32 gr |
|
| 後車の動輪荷重 | 31/31 gr |
EH500形電気機関車は、JR貨物が1997年から製造する三電源方式交流直流両用電気機関車である。 全長25m、運転整備重量134.4tと現在の日本の機関車では最大級の2車体方式のマンモス機である。
愛称はEF210形の「ECO-POWER 桃太郎」と対をなす形で、「ECO-POWER 金太郎」、 もしくは(EH10形の「マンモス」に対応して)「平成のマンモス(機関車)」と呼ばれる。制御方式はVVVFインバーター制御を採用し、ED75重連と同等の牽引能力を誇る。
メーカー : TOMIX
商品名 : EH500 1次形
品番: 2142
車両番号: EH500 2
スケール : Nゲージ、1/150
発売日 :
入手日 : 2010年12月 中古品入手
定価 : \9,975.-
● 1エンド側と2エンド側は内側の台車間で常時連結され、通電もされている。 動力は、1エンド側から2エンド側へ回転シャフトで伝達。 2エンド側車体の台車もトラクションタイヤを履いている。
● フライホールなし。
● ヘッドライト 点灯
● カプラーは少し細工をして、KATOのナックルカプラーに交換する。
● ミニレイアウト走行可能。
この車両は、メーカが提供するオリジナルな状態で、1エンド側車両(前車)に、ウォーム付きのモータが搭載され、4軸の動輪を駆動している。 また、2エンド側(後車)には、モータの付いてないウォームシャフトが装着されており、動力伝達シャフトによって前車のモータ軸からトルクを伝達されている。 そして、このウォームシャフトからギヤ機構によって後車の4軸の動輪を駆動している。 即ちひとつのモータによって、全部の車軸が駆動されていることになる。
また、各台車には1輪ずつゴム輪の車輪が交互に設定されているので、後車でも充分に駆動力を発揮する。 そして、車体を連結するカプラーは通電機構が組み込まれているので、集電機能も万全な構成である。 また、前車と後車は、設計と部品の共通化が図られているおり、その違いは、上記のウォームシャフトとモータの違いと、車体の1と2の表記違いだけの様である。
しかし、TOMIXさんが部品としてモータ単品でも供給しているので容易に入手できるため、後車にもモータを搭載して、駆動領域での牽引力の補強を行った。 組付け作業は容易で、いわゆる「ポン付け」作業であった。
詳細は、「2モータ化の効果を検証」 を参照下さい。
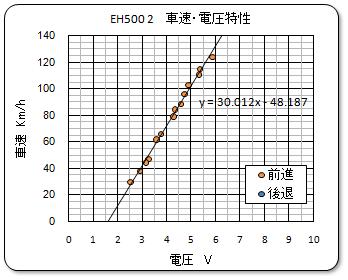
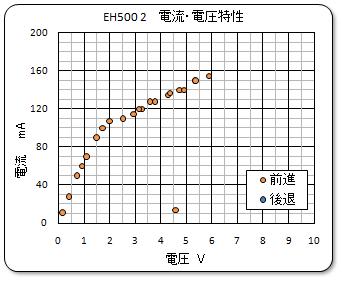
速度特性:
動力車の速度特性として、速度・電圧特性と電流・電圧特性を右に示す。
スケール速度80Km/hは、電圧でみると、4.0volt近辺である。 速度係数は、約 30Km/h/Volt と標準的である。
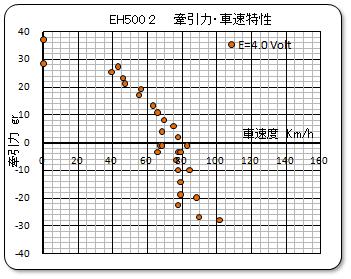
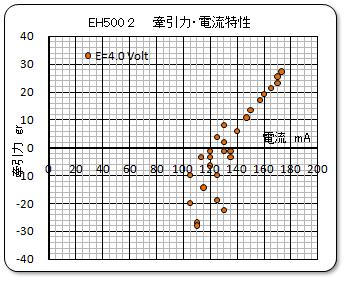
牽引力特性:
動力車の牽引力特性として、電圧 4.0 volt での牽引力・車速特性と牽引力・電圧特性を右に示す。 全部動輪で、なおかつゴムタイヤを4個も履いているのに牽引力は意外と小さいのは、測定ミスかも知れない。 前後の車両を分けたS系の機関車の単機でも20グラムはあるので、40グラム以上あってもよさそうである。
なお、2エンド側の車両にモータを追加しても、粘着限界はモータ重量アップ分しか向上しないので、あまり意味がないであろう。 ただ、牽引力と速度の勾配は立ってくるため、登坂時のスピードダウンは改善されるであろう。
◆ 2モータ化の検証
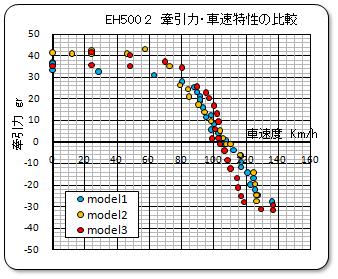
2モータ化した場合の牽引力データを右に示す。 電圧は、E = 5.0 Volt 一定状態でそれぞれ測定した。 粘着限界領域の状態を広げて観察するために、いつもの条件より電圧をアップして測定してみた。
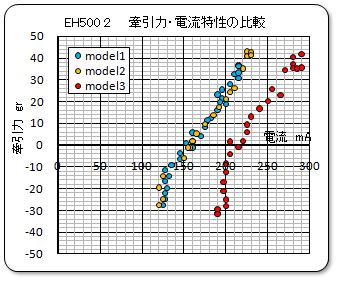
まず、牽引力・車速特性を見ると、3モデル共に大きな変化は無い。 電流特性では2モータ化したModel3 が50mA以上も増加しているのが分かる。 つぎに、さらに詳しく観察してみよう。
オリジナル構成のものに重りを追加したModel2は、Model1 と比べて、特性は殆どおなじであるが、粘着限界領域では牽引力が10グラム弱増加しているのが観察される。 これは車両重量の増加による効果と判断している。 電流特性は全く同じである。
次に、Model3 と Model1 を比べて見ると、Vo 点がやや下がっているが、速度に対する牽引力の勾配は立っている事が分かる。 このA状態においては、二つのモータのトルクが加算されて駆動力として発揮されるので、この勾配は2倍となるはずである。 2モータの協調作動がうまく行っている領域である。 その結果として、坂道において牽引する負荷が増加した場合での速度ダウンが少ない事が予想される。 重い貨車を牽引しても坂道を涼しい顔をして登っていくだろう。 でもオリジナル構成でも速度ダウンは多少は大きいものの坂道はやはり登るのである。
この坂道を登りきれるかどうかは、粘着限界領域での牽引力で決まる。 Model3 は Model1 を比べてやや増加しているものの、Model2 程ではない。 2モータ化の効果はここでは現れないのである。