HOME >> マイコレクション > 蒸気機関車リスト > C57 195
小型蒸気機関車: C57 195


国鉄のC57形蒸気機関車は、昭和12年(1937)から昭和22年(1947)にかけて201両が製造され、急行列車などを牽引して活躍した。
4次形は昭和21年(1946)から22年にかけて製造されたC57最終のグループである。 デフレクター前端上部が斜めに切り落とされたり、運転室の密閉化、テンダーの船底化、台車のコロ軸化などが特徴である。
195号機は、1947年に製造され、門司機関区や熊本機関くなどに配置され、1970年に人吉機関区を最後に廃車された。
メーカー : KATO
品名: C57 4次形
品番: 2023
車両番号: C57 195
発売日 : 2014年5月29日
入手日 : 2014年5月30日 新品購入
定価 : \14,040.-


● C62型で完成したコアレスモータなど、最新技術が詰め込まれた次世代型動力ユニットの最新モデルである。
● 前部ヘッドライト点灯。テンダーのライトはダミー。
● カプラーはアーノルドカプラーからマグネティック・ナックルカプラー(28-150)に交換。
● 配管類は細部まで再現されている。 特に運転席下側の配管類は虫眼鏡が必要なほど見事で、見あきない。
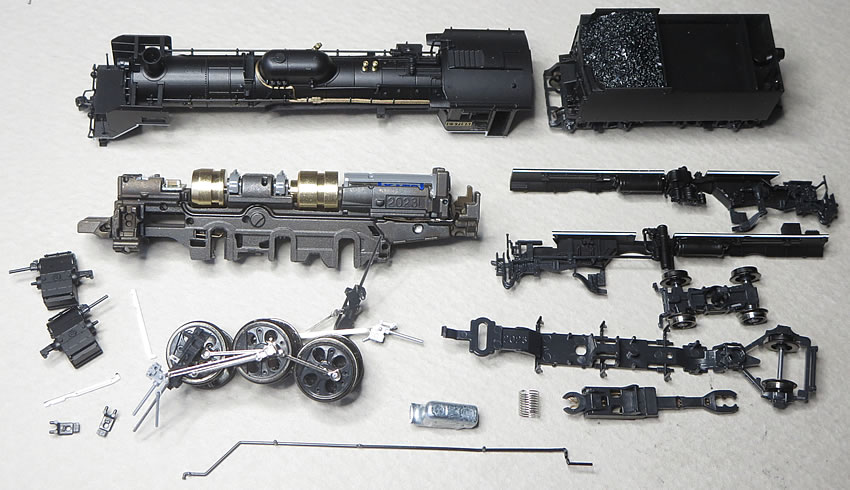
● 分解は、まだモータが見える程度までしか実施していない。 しっかりと動力性能を測定した後に実施予定。




● 主要諸元は次の通りである。
| 連結面間距離 | 139.0 mm |
先輪車軸荷重 | 1.0gf | 動輪車軸荷重 | 49.8 gf | ギャ比 | i = 37.64 |
| 車体全重量 | 67.2 gf | 従輪車軸荷重 | 0.6 gf | テンダー車軸荷重 | 15.8 gf | 動輪直径 | D = φ11.4 mm |
● 2回目の測定の後に、少し分解する。 構成はボイラー内にモータを配置したモデルと同様の構成である。 今回はロッド部分は不用意に分解してしまい、バラバラになってしまった。 再組み付けが出来るが少し心配である。 今回はフレームの分解までは実施していません。


 .
.
細くて長いボイラーに合わせて、モータやウォーム類をすっきりと構成されています。中心にはウォームギヤが内蔵されており、アイドラギヤを介して、第3動輪がギヤ駆動されています。 詳細は、この部分までも分解されている「鉄道模型机上の空論」さんのホームページを参考にすると、バッチリですね。
2条ネジのウォームは、m = 0.3、Z = 23 のウォームギヤと噛合い、さらに m = 0.25、Z = 11の小ギヤは、二つのアイドラギヤを介して、m = 0.25、Z = 36 の動輪軸のギヤに伝達されているとのことです。 従って、ギヤ比は i = 37.64 となります。
ボイラ内にモータを配置したこれまでのモデルと同様に、第2と第3動輪は上下方向も固定されていますが、第1動輪は上下に少し動けるようにしてあり、板バネで押さえてあります。 このため、凸凹線路でも動輪の浮きが無いように配慮されています。 イコライザーのようですが、機能的には第1動輪の駆動力は期待できないと思います。 逆に、ピッチングがひどくなったのではないかと考えています。
小生の物置部屋のレイアウトは、保線工事がいい加減なため、線路は凸凹で、その水平も怪しものです。 電車類は車輪のスパンが長いため、線路の凸凹による車両のピッチングはほとんど目立ちませんが、この C57-149号機は、“おじぎ機関車”の如く、ペコペコしながら走っています。 今更、線路の凸凹を修正するのは、大工事になってしまうので、目をつぶることにしました。 線路のバラストを固定する前に調整すべき内容でした。
この C57-149号機の機関部の長さは、先端から運転室の端まで 90mm あります。 しかし、線路と接触するのは第2動輪と第3動輪ですから、(他の車輪は上下に逃げてしまう) そのスパンである 12.5mm で支えることになります。 即ち、動輪部の傾きは、90/12.5 = 7.2 倍となって機関部の前後の傾き具合が明らかに見えてしまうのです。今までも、C62やC56を走らせてきましたが、今回は何故か気なってきました。
それから、もうひとつ、走行中の雑音が気になります。 C56は非常に静かだったのに、このC57-149号機はモータ(?)のうなり音が耳に障ります。 測定台のベニヤ板は特にひどいのですが、レイアウト上でもその雑音がしっかりと聞こえてきます。


そこで、分解途中(上右の写真の状態)で、モータを回して見ましたが、回転している音は静かでしたが、携帯電話のバイブレータのように、手にビリビリと振動が感じられました。 これはロッド類の不釣り合いと想定して、車輪を取り外した状態(上右の写真)でも同様に回して見ました。 しかし、やっぱり振動は手に伝わってきました。 原因は回転部のダイナミック・バランスが崩れているためと判定しました。 この振動がレイアウトの台に伝達し、走行音として聞こえてくるようです。 形状からすると、ウォームギヤが怪しいようですが、この車両だけなのか、あるいは他のモデルも同様な傾向があるのか、チェックしていく必要がありますね。
ここに示す動力特性の測定は、安定化電源を使用した自動測定システムにて実施する。 測定実施日: 2014/7/3
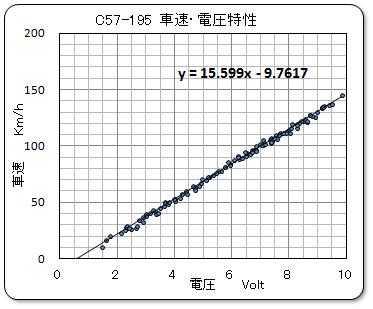
速度特性:
単機平坦路走行での動力特性を測定する。
スケール速度の80Km/h を出すには、 6Volt 必要であり、一般的なNゲージよりも遅いと言える。 C56やD51と同じ仲間です。
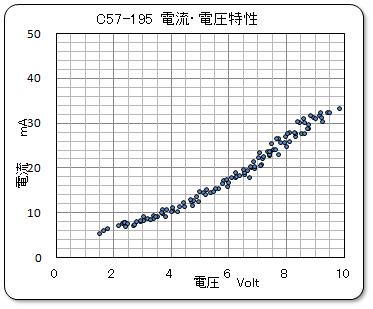
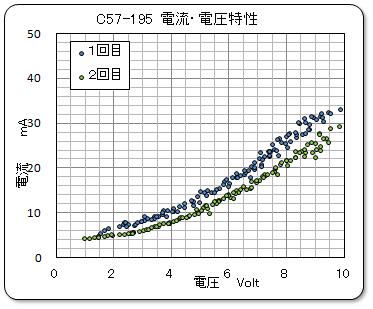
電流は、コアレスモータの特徴で、7~ 30 mA と非常に小さい。
そして、極低速は、スケール速度で10Km/hの超ノロノロ運転でも可能である。
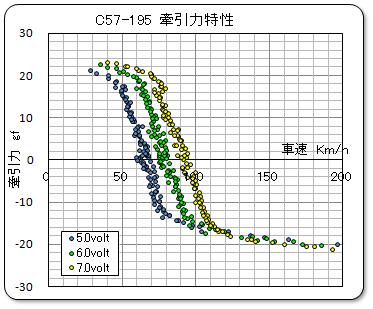
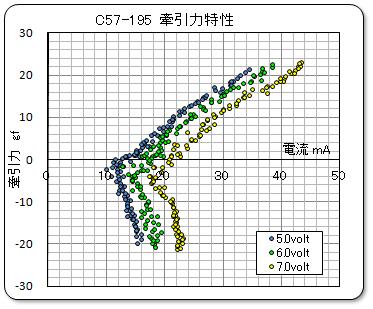
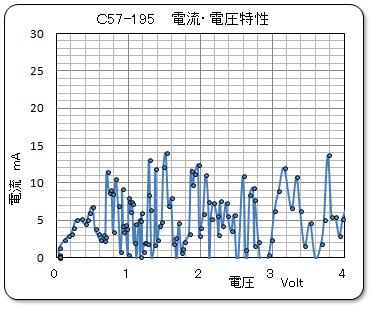
牽引力特性:
牽引力特性を右に示す。 D51やC62 のようなすっきりとしたパターンを期待したが見事に裏切られてしまった。
データはバラバラであり、ドリフトの様な現象も見られる。 走りの状態を見ている感じとデータでの現れ方が違っている。 見た目には安定した走りを見せているのに、データとしては、少しバラツイた不安定性を示す測定データなのである。
KATOの技術陣が努力してきた結果が、安定性に欠けるデータとなっているのは、なぜ・・・・・・・?
感性で評価する場合とデータで評価する場合の違いの難しさを感じてしまったので、この特性線図を測定する意味は何なのだろうか、とまで反省し、「特性線図から何が読み取れるか」の自問自答を実施したのである。 参考にこちらも見てください。
● 分解と再測定の実施
少し頭を冷やした後、ボイラー部と動輪押さえを外し、軸受部とギヤ部にオイルを少しばかり注油する。 特にウォーム軸の軸受部分は注意して注油した。 そして、レイアウト上で1時間ほど馴らし運転を実施して、再測定を実施した。 その結果を下に示す。 再測定実施日: 2014/7/3/10
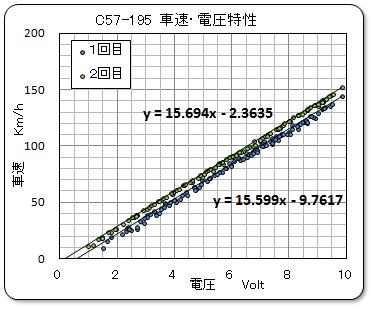
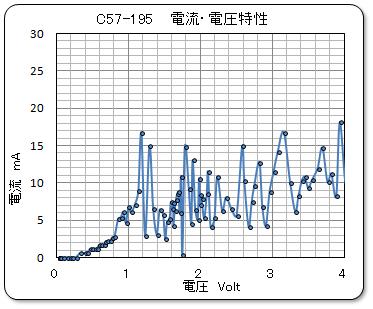
1)速度特性:
再測定した単機平坦路走行での動力特性を “2回目” として右に示す。
スケール速度で10Km/h ほどスピードアップされており、電流値も 2~6mA も少なくなっている事が分かる。
これは、とりもなおさず摩擦抵抗が小さくなったことを示していると考える事が出来る。 最低電圧もゼロに近いのは驚きである。
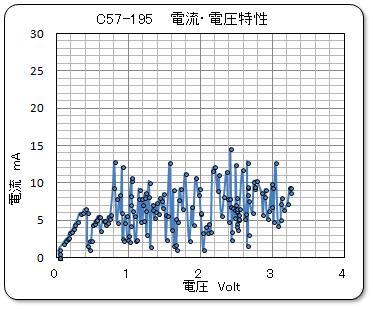
電流値が弧を描いているのは、コアレスモータの特徴だろうか。
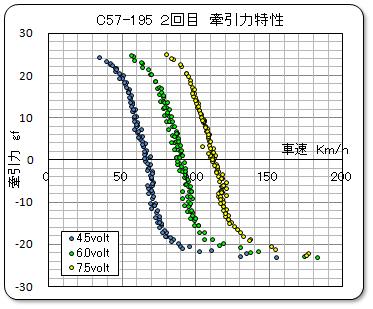
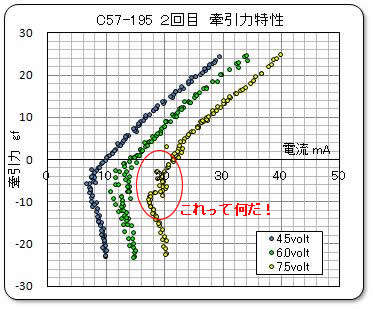
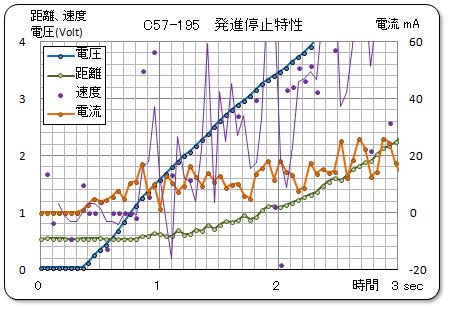
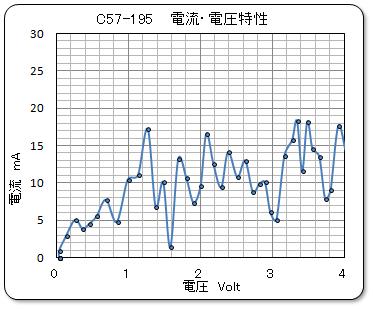
2)牽引力特性:
再測定した牽引力特性を右に示す。一度、疑ってしまった事を忘れるようなデータを得る事が出来た。 最新モデルはこうでなくちゃ!
“オイル一滴” でここまで変化するとは我ながら感心してしまうのである。 メカ部品はいかに潤滑が重要であるかを再認識しました。
パラメータは少し変えていますが、電流値も小さくなっていることが分かりますし、データのバラツキも非常に小さくなっています。
そのおかげで、内蔵していた不思議なパターンがはっきりと現れてきましたね。 遷移点付近での電流値の変化を見ていると、特性値がドリフトしているのが良くわかります。 第1回目の測定の時も様子がおかしいなと思っていましたが、電圧が高くなるにつれて(回転数が影響しているのかもしれない)、その様子ははっきりとします。
何故だろうか? D51やC62 と特に変わった構造でもないし、2条ウォームの影響かな? このへそ曲りなパターンの原因はよく分かりません! お手上げです。
![]()
発進停止特性の測定を、安定化電源を使用した自動測定システムにて実施する。 測定実施日: 2014/7/14
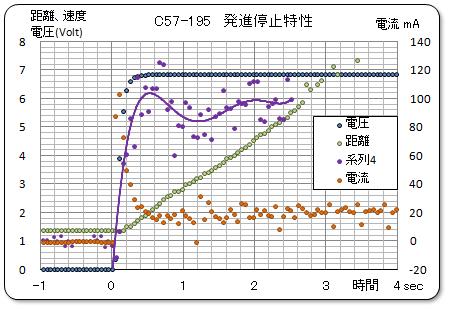
3)発進特性 ランプ応答:
超音波方式の距離センサーを使用した計測システムで発進時のランプ応答を測定した。 グラフの見方は、「発進停止特性を測定する」を参照ください。
車両を停車させておき、供給電圧を徐々に上げていって、車両が動き出す電圧を読み取る。 下に4回の測定データを示す。
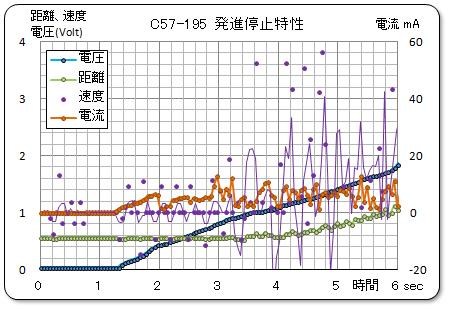
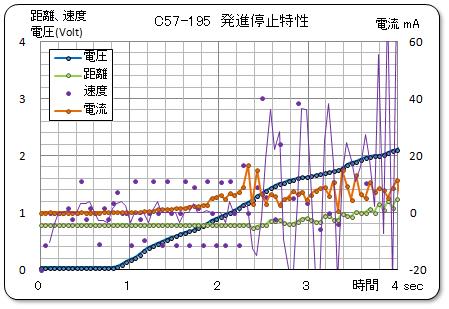
このSLは、わずか1ボルト前後でゆっくりと動き出すのには驚きである。 今までもスケール速度が 20Km/h 以下の超ノロノロ運転が出来る車両はあったが、走り出しの場合はそうは行かなかった。 2~3ボルトは必要であり、それなりのスピードで発車していた。 しかし、この車両は走り出しも超ゆっくりと走りだすのである。 これは、とりもなおさず摩擦抵抗を小さくする事が出来たためと判断する。
このように動き出しがスムースであったため、どこから動き出したのかを決めるポイントをつかむのに苦労している。 今までよりもグラフのスケールを拡大し、距離データが動き始めるポイントを探すようにした。 電流と電圧の関係は今までと様子が異なっている。 モータが回りだすと電流変動が発生するようなので、そのポイントと合わせて判断する。 ホビーの範疇を超えている・・・・・・・・・・・1
動輪の回転と同期させたドラフト音付きのサウンドシステムを搭載すれば、ダイナミックな発車運転を楽しむ事が出来そうであるが・・・・・・・・、予算が無いので諦めることにしよう。 音の後は、煙と蒸気と・・・・・・・・・・・・・・・。 無理か!
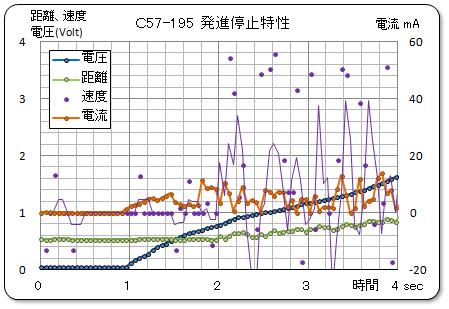
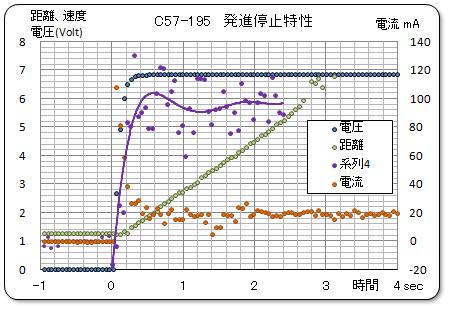
4)発進特性 ステップ応答:
停止状態から、スケール速度 100Km/h のスピードまでステップ状に加速させる場合を測定した。 2回測定したデータを下に示す。 立ち上がりやオーバーシュート状態を観察しようとしているが、まだ未完成である。 もう諦めている。 この車両はフライホイールを搭載しているが、立ち上がりは早い。
5)停止特性:
スケール速度 100Km/h のスピードで走っている状態から、電源を突然切ってしまった状態にして、その停止までの走行状態を観察しようとするものである。
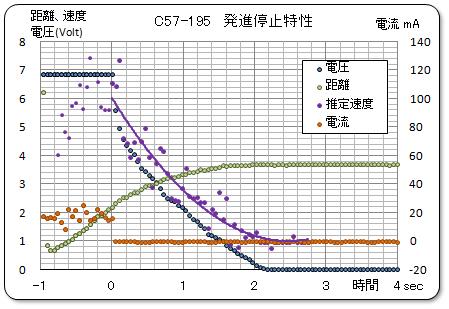
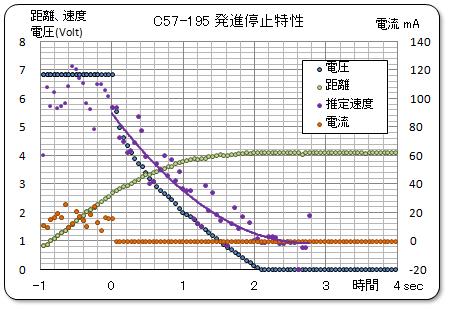
フライホイールが搭載されているので、停止距離は 151、139、137mmであった(上記のグラフは2回分しか記載していない)。 今までの車両とは格段に停止距離が延びている。 グラフからも停止までは2秒以上掛っているのが分かると思うが、 “ まだ動くの? ” と驚きの目で見つめていた。
これは単にフライホィールだけの効果とは思えない。 特別大きなフライホイールが搭載されている訳ではないので、ここでも摩擦抵抗を小さくした効果があらわれているのである。 また、グラフの推定速度データは、6次曲線ではなくて、2次曲線で近似させている。 線形近似では?と当てはめてみたが、こちらの方がよりピッタリであった。
********************************
ここで、気になった事がある。
停止特性では、フライホイールの効果が充分に出ているのに、発進特性(ステップ応答)では、ほとんど効果が無いのはなぜ?
頭を冷やして考えると、これは当然な現象であることに気が付いた。 発進時のステップ応答では、モータのトルクが充分に有り、少しぐらい大きなフライホイールといえども簡単に加速する事が出来る。 しかし、停止時はモータは作動せず、フライホイールの慣性と摩擦抵抗の関係で動いているのである。 小さな摩擦抵抗と大きなフライホイールの慣性では、停止までにゆっくりと減速していくのである。
実際の電車や自動車では、重い車体を “よっこらさ ” と加速し、止まる時は、重い車体の慣性のために直ぐには止まれないである。 ゆっくりとしか加速出来ない重い物体はゆっくりとしか減速できない、止めるためには強力なブレーキが必要である。 この感覚は鉄道模型には当てはまらにようである。 N ゲージでは、停止時にあえてブレーキがかから無いように苦労しているのである。
変なことに感心している、変なおじさんです・・・・・・・・・・・・・・・。
( 2014/7/14 追記)