
HOME >> 鉄道模型工作室 > 小型のターンテーブル式実験装置を作ろう 実験開始
小型のターンテーブル式実験装置を作ろう 実験開始
制御と駆動回路の改善を実施したので、牽引力の測定を始める前に、二つの制御方式の効果を実験して比較してみた。でも結果は・・・・?
■ 実験方法
実験装置の全体像を下に示す。小型のターンテーブルの他に安定化電源とノートパソコンを用意した。


安定化電源は線路上の動力車に電力を供給するもので、DC電圧を可変設定することが出来る。 ノートパソコンは、測定回路からの送信データを受け、リアルタイムにデータを表示させることができ、そのデータを見ながら測定条件を変更し、動力車の特性を測定するのです。
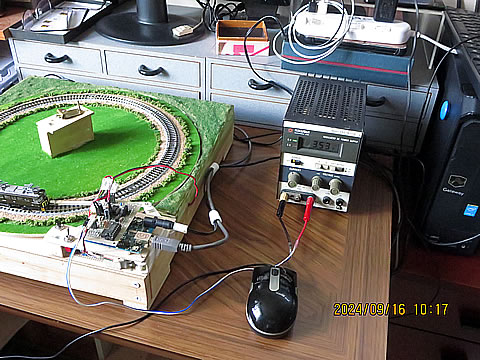

各機器には、ACアダプタを使用して電源を供給している。 ノートパソコン用専用アダプタ、Arduino用9Volt、ターンテーブル駆動用の3.3Voltなどである。
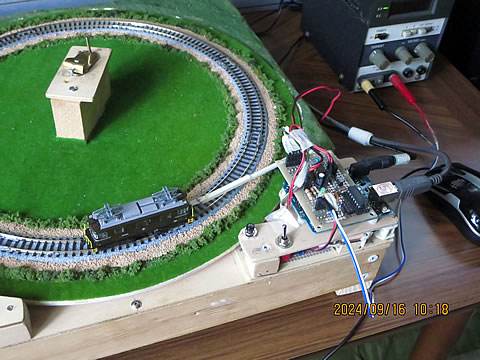
測定部と動力車の状態を下に示す。

なお、測定にあたってのアプリ類をメモしておこう。
- 測定用のArduino : TurnTable-Measure-1.ino 供給電圧と電流、牽引力、テーブルの回転数を計測して、データをシリアル通信にて送信する。
- ノートパソコンのリアルタイムデータ処理 Python : turntable-1.py シリアル通信にて受信したデータをExcelのデータシートにリアルタイムで書込む。
- ノートパソコンのExcelファイル: Arduino−TurnTable−〇〇〇.xlsx 測定されたデータを受け取り、必要な計算処理を実施してグラフに表示する。
3番目のEXCELファイルは、測定対象物ごとに〇〇〇部分に名前を付けて作成している。
■ 何故二つの制御方式が必要なか
 .
.
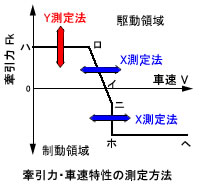
まず最初に、この問題点を復習しておこう。始まりはNゲージ動力車の動力特性を測定し始めた頃からの課題であった。幾度も右の様なイラストにて説明しているので今さら復習の必要は無いのであるが、この課題を頭に於いていてほしいのである。
実際の動力車両、鉄道の蒸気機関車であったり、あるいは自動車など、車輪を使って走行する動力車両の走行特性などの性能測定に、昔から技術者が取り組んできて実績もあるのだ。自動車のメーカーや車検検査場などでは、シャシダイナモメータと言う装置を使用して測定されています。(ネットでは詳しい解説書が公開されていまっすのでそちらを参照してください)
このシャシダイナモメータの構成は、大きな円筒と発電機(ダイナモ)を使ったシンプルの構造である。しかし、この構成をNゲージの動力特性の測定には適応できませんでした。それは、ホビーでも使用できるような小型で高トルクの発電機(モータ)が無かったのです。 このために減速機を使う必要があったのですが、これまた適切な物がありませんでした。一番問題となったのは摩擦トルクなのです。
測定装置での負荷部分は、動力車の車輪上にて1グラム重以下の小さな摩擦にする必要があったのです。Bトレの動力車の牽引力は5グラム重程度の力しかないので、せめてその1/10の摩擦力しか許容されなかったのです。
このため、「小型のターンテーブル式実験装置を作ろう 動力特性の測定方法」(2023/9/10)の様にいろいろ工夫してきましたが、今回のプロジェクトにて、問題解決の糸口を見つけたのです。この実験装置のターンテーブルはモータで強制的に回転させていますが、その駆動回路に、抵抗制御とPWM制御の二つの制御方法を切り替えて作動させる方式なのです。
■ 実験その1
 .
.
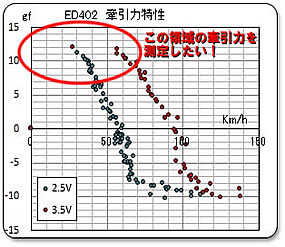
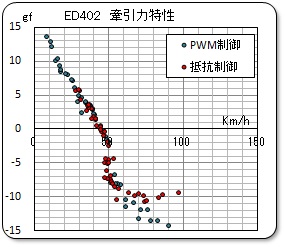
まずは、実際にモデルを走行させて、その特性データを観察してみましょう。 動力車は鉄道コレクションの岳南電車 ED402 号機です。下左のグラフは、「小型のターンテーブル式実験装置を作ろう またも壁が!」(2023/10/7)での測定データです。
*****************************************
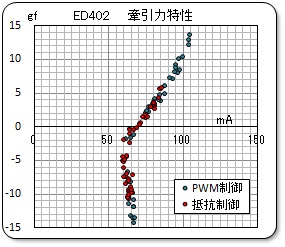
今回測定したデータを下の中央と右に示します。 設定条件が少しズレていますが同じ傾向の特性が取れています。
さらにうれしい事に、低速域もバッチリと測定できました。
抵抗制御とPWM制御の二つの測定データは、同じ特性上に重なっていますので、両者の測定方法が両立できることを示しています。しかし、制動側のスリップ領域は問題が残りますな。原因を調査しておく必要がありますが、牽引力−電流特性は問題ありません。
この測定データを二つの制御方式別に表示してみました。二つの測定方法の違いが明確に出ています。
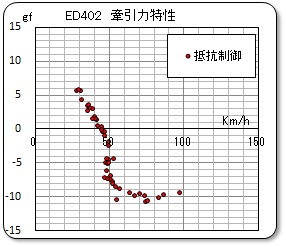
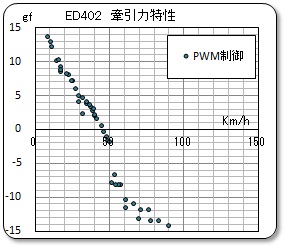
抵抗制御の場合、低速側をもっと詰めていればさらにデータが収集できたかもしれません。でもPWM制御では、低速領域が容易にに収集できています。でも、制動側のスリップ領域のデータが抵抗制御の場合と異なっています。さらに、制動領域の大切な部分が抜けています。何度もトライしたのですが、上下に固まって中間部が設定できませんでした。 そうなのです。この部分がPWM制御での欠点なのです。
■ 実験その2
次に、見方を変えて実験してみました。今までは、供給電圧を一定して置き、負荷側の設定を順次変更してデータを収集していました。この方法を逆にして、負荷側の設定を固定して置き、供給電圧を変更しながらデータを収集してグラフに表示させました。
まず、抵抗制御の場合のデータです。
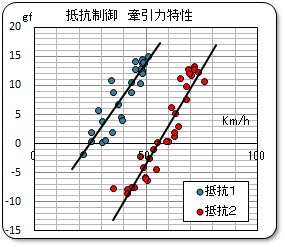
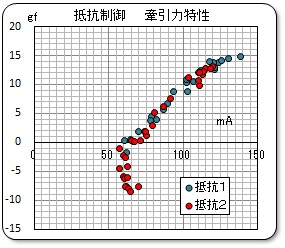
まず、ボリュームの値をある値に固定してデータを取りました。抵抗1のデータです。次にボリュームの値を変更した場合のデータも測定しました。抵抗2のデータです。そしてこれらのデータの近似直線も引いてみました。抵抗1は、低速ぎりぎりの状態にしています。
データを見ていると、測定された牽引力の値は車速に比例して増加しています。この場合、負荷回路側から見ると、牽引力イコール負荷力となるので、抵抗制御の場合は、モータの回転数とトルクは比例していることが分かります。直流モータの場合は、当然ですね。 この測定方法は、傾斜のある特性ですが測定概念図のX測定法に対応しているといえます。
そして、抵抗値を変えると右に移動する特性となっています。もし、減速機構の摩擦が小さく、かつ逆効率が高い場合は、ゼロ点を通る特性に設定させることが出来と思われます。またモータとして作動させるのでは無くて、発電機(ダイナモ)として機能させると、さらに低速側に設定することが出来るのですが、この装置では無理であるkとが分かります。
抵抗1の場合、負荷抵抗を上げるには速度もアップしなければならないことも判ります。この状態は今まで低速領域が測定できなかった理由と思われます。また、データのバラツキが意外と大きいのが気になります・・・・・・・・・。
■ 実験その3
こんどは、PWM制御によってターンテーブルを制御させてみましょう。測定方法は実験その2と同じですが、制御スイッチを切換て測定しました。
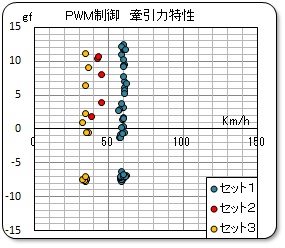
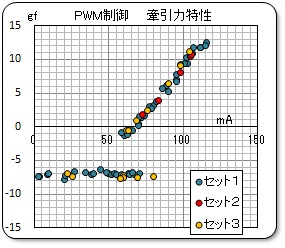
さすが、小型マブチモータ用PWM方式の回転速度制御コントローラのうたい文句どうりですね。負荷が変動しても速度一定に保っています。もっと低速側に設定できるようでしたが、まだ詰めてはいません。 上記のY測定法が実行できることを示しています。
でも、これはこれでよいのですが・・・・・・・、制動領域の特性は不合格ですね。なぜか中間部が空洞になっています。牽引力と電流値のデータを見ても不思議な現象ですね。予想もしていなかった特性なので戸惑っています。
なんでだろう? このPWM制御方式では、制動領域での測定が出来ないという事でしょうか・・・・・・・・・。
ムムムムムムムムムムム・・・・・・・・・・・・・・・。
**********************************************
でも、だんだん面白くなって来ました。まだまだ実験データが少ないので、色々な車両を使って実験して、内容を詰めていこうと思います。
2024/9/19