
HOME >> 鉄道模型工作室 > ポイントのスローアクション駆動 どっちを使う?
鉄道模型工作室 ポイントのスローアクション駆動 どっちを使う?
Nゲージの電動ポイントは、通常はソレノイドを使ってパチンパチンと切り替えています。 しかし、工作の先輩の方々は、実際のポイントの様にスローアクションで駆動される工夫をされています。 自分も何時かはこの方式に挑戦したいと思っていましたが、ついに手を出すことにしました。
■ 先輩方の実施例を参考にする
まず、何時もの様に先輩方の実施例をネットで調べました。 DCモータを使用した例、ステップモータの例、そしてサーボモータの例を拝見しました。 いろいろ苦労されている様子や、工作上の課題も見えてきました。
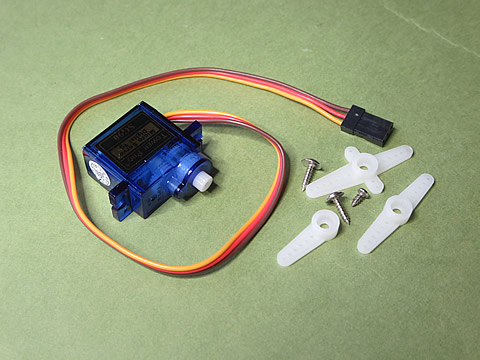
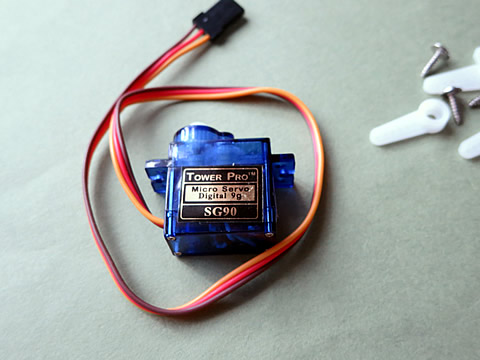
自分は、「PWMによるサーボモータの制御」(2017/3/17)にて、RaspberryPiを勉強する中で、サーボモータを使った踏切の腕の開閉運動にトライしていた。 この時に使用したサーボモータは、下の写真に示すように、Towe Pro製の MicroServo SG90 というアクチュエータであった。 先輩方のスローアクション駆動にも使用されているものである。
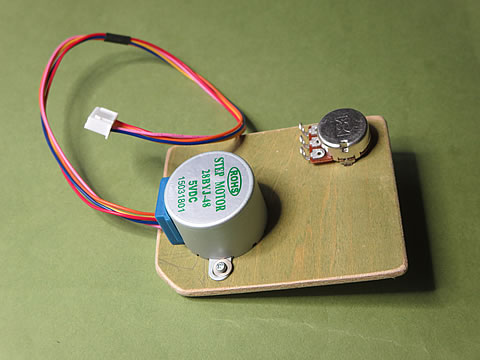
一方、コンパクトなステップモータを使用されている例もあった。 こちらの物は、28BYJ-48 と呼ばれている仕様のものである。 そして、下の写真は最近入手した同じものである。
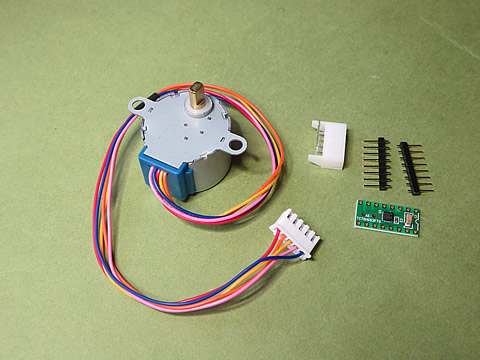

事前調査が不充分な状態で注文してしまったので、モータドライバンは一般的でない物を注文してしまった。 多くの例では、ステップモータとそのドライバーがセットになっているものが多いのだ。 このため、後で苦労することとなってのだ。
■ どの方式を選ぼうか?
まず、このスローアクション駆動をどこのポイントに適応させるか、あらかじめ決めておくことにした。 設置場所、スペース、制御方式などの制約があるからである。 そこで、新登山鉄道レイアウトのふたつのポイントにまず適応することにした。 すると、駆動対象のポイントは、KATO製のポイントで、ユニットの設置場所はポイントの裏側となり、制御マイコンは Arduino MEGA を使用することになるのだ。
制御プログラムに関して、Arduino には、ステップモータの場合はStepper、サーボモータの場合はServo というライブラリが提供されているので、制御プログラムは比較的容易である。 また、駆動するためのドライバについて、サーボモータの場合は5ボルト電源だけでドライバは不要であるが、ステップモータの場合は2チャネルのドライバが必要となってくる。
もう一つ注目している点は、回転軸の位置情報をどうやってフィードバックするのかという点である。 何らかの理由で制御途中に電源がOFFした場合、軸の位置はスタート位置に戻っているという保証がない。 すると、再稼働した場合は途中位置からのスタートなるので、回転軸や連結されているレバー類の位置関係はクシャクシャとなり、最悪の場合は破損などを想定しなければならないのだ。 サーボモータの場合は内部に位置センサが内蔵されているとの事ですので、中途半端で停止しても、再開時は正しい位置に復帰できるようだ。 しかし、ステップモータの場合は、回転角センサは内蔵されていないのでどの位置から再開するのか不明である。 このため、何らかの位置情報を取り出す工夫が必要となる。
************************************************
使い方の例を見ているとサーボモータの方が使いやすそうである。 しかし、軸や外箱の様子では華奢に見えるので耐久性が心配である。 幸い、両方の機器が手元にあるので、実際に使ってみて、その結果から判断しても遅くないと思った。 まずは実験してみよう。
■ ステップモータを使ってみる
 .
.
上記のようにサーボモータを使ったことがあるので、今回はまず、ステップモータの使い勝手を体験してみることにした。
テストモデルの構想としては、ポイントの下側のベース板にユニットを取付ける形をイメージして工作することにした。
*****************************
出来上がったユニットとポイントの関係を右の写真に示す。
ソレノイドによる駆動は必要なくなるので、内蔵物を取り去ってリンク関係を新しく作ろうとも考えたが、我がレイアウトでは選択式の配電となっているのだ。 給電系の制御系を新たに工作するのも面倒なので、ポイントに内蔵されている給電系を生かしておくためには、ポイントのスライドレバーがそのまま必要となるのだ。
結局は、ポイントはそのままの状態で使うことを決めた。 外に出ているスライドレバーのΦ0.7mm程度の穴をあけ、その穴を使って駆動させることにする。 そして、そのレバーの近くに揺動する軸を設けて、ピアノ線などを使って連結させる方法を考えた。 さらに、この軸は可変抵抗器の軸を活用すると、レバー位置の情報を取出すためのセンサともなるのである。
最初に、グラフ用紙を使って検討図を描いてみた。 まず、使用するレバーは、TAMIYAのテクニクラフトシリ−ズで使われていたアームを利用することにし、モータとボリュームの位置を決めた。 そして、工作ストック品の中から、ベニヤ板を 75×60mm に切出して、モータなどを取付けた。 リンク関係は、アームの穴を利用して後からレバー比が変えられるように工夫している。
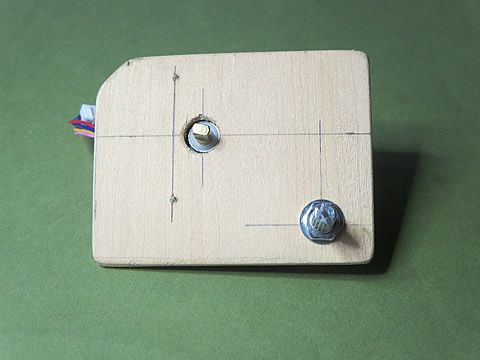

機器の取り付け状態を下に示す。
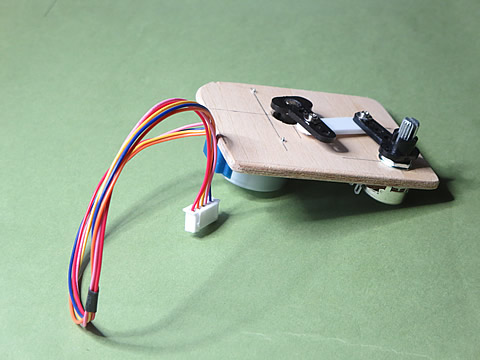
ステップモータの実験用駆動部が出来たので、次にこのモータを駆動させる電気回路を作り、制御プログラムと作動の確認を行うことにしよう。
2022/9/24