
HOME >> 鉄道模型工作室 > ポイントのスローアクション駆動 レイアウトへの組込み
鉄道模型工作室 ポイントのスローアクション駆動 レイアウトへの組込み
Nゲージのポイントを実際のポイントの様にスローアクションで駆動させようと挑戦しています。 サーボモータ方式での駆動方法が確認できたので、予定していたレイアウトに組込み、作動を確認しました。
■ レイアウトベースへの組込み
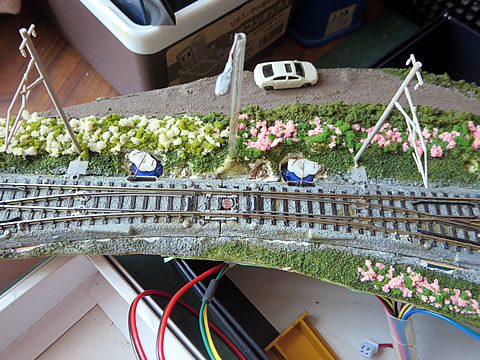
昨年から整備してきた新登山鉄道のミニレイアウトに、スローアクションのポイント駆動を組み込むことにしました。 このレイアウトでは2個のKATO製のポイントを使用しています。
まず、そのポイントが設置されている登山口駅のレイアウトのベースを取外し、そこにΦ15mmの穴をあけ、サーボモータ SG90 を取付けてました。 下の写真。


揺動レバーは付属の両腕型のアーム部部分を短く切り取り、そこにΦ0.5㎜ のリン青銅線を使ってバネ作用のあるレバーを作りました。 最初は、Φ0.8mm のステンレス線で工作したのですが、剛性があり過ぎてモータの位置調整が困難でした。 そこで、バネ作用を生かした方式に変更しました。
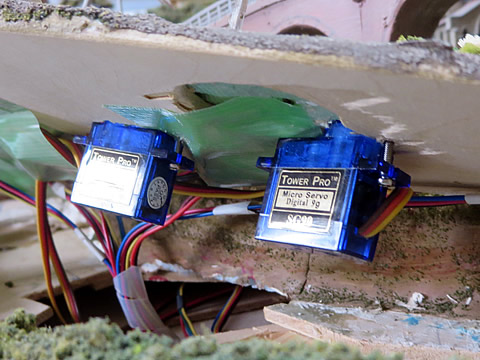

サーボはベースの裏側に垂直に取付ています。 両側を M2mm のネジで固定しました。
■ 作動角度の設定
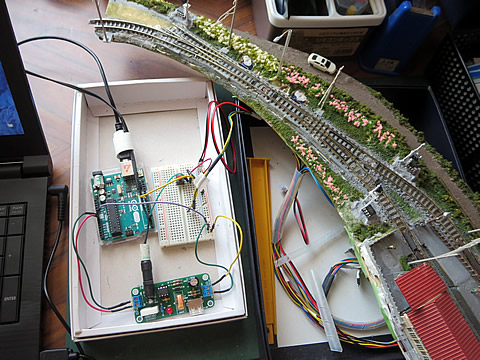
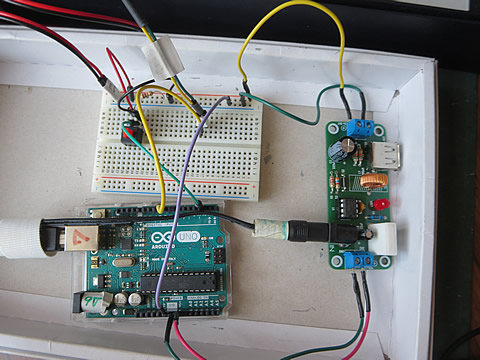
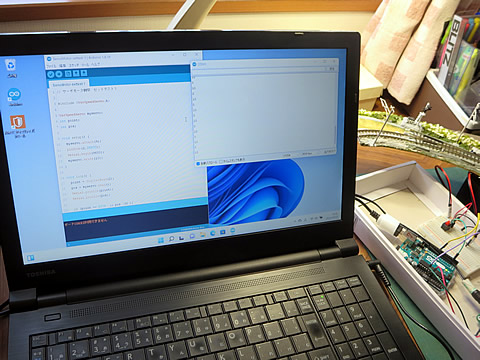
登山口駅のレイアウトベースに組込んだ状態で、サーボの作動角を調整しました。 調整装置は、取外したレイアウトベースを机上に置き、先回の実験と同様な電子回路を組み、ノートパソコンと接続して実施しました。 サーボを作動させるため、簡単な記述のスケッチを作成しました。


サーボ角の調整方法は、最初にアームを外した状態(上右の写真)にて、最小角度の20°に設定した状態にしておきます。 勿論、スケッチで記述して作動させるだけです。 その状態でアームが左端に来るように取付けました。
そして、少しづつ振れ角を大きくしながら、ポイントの状態とシリアルモニタに表示される数値を見ながら、最大振れ角の位置を決めました。 その角度は、両方のポイントとも、10°と 60°でした。 バネ作用もありますのである程度大雑把です。
■ レイアウトにセット
振れ角の調整が出来たので、登山口駅のレイアウトベースを本体に取付けました。 サーボ本体が干渉していないことも確認しました。


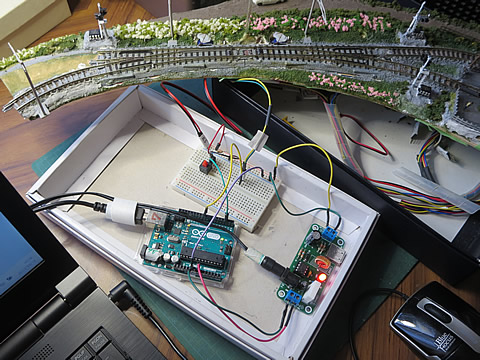
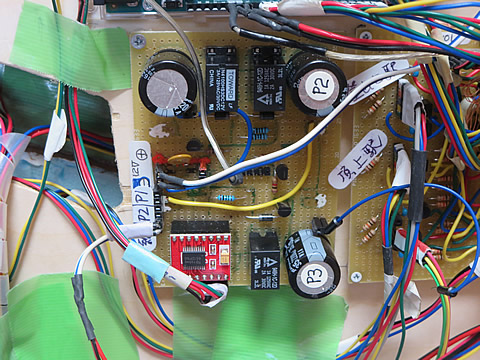
レイアウトの裏側にて、配線を少し変更しました。 ふたつのサーボの配線は、下右の写真に示すように、ピンヘッダを使った簡単な配電盤を作り、+5VとGNDの電源線とふたつの信号線に集約してそれぞれの接続先に配線しました。
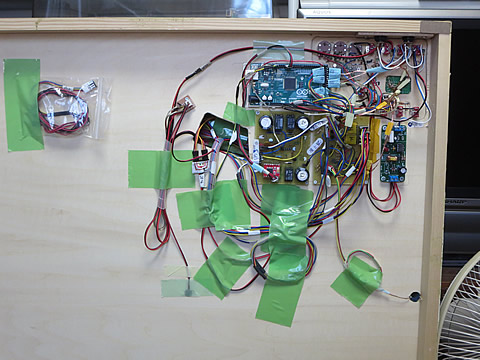
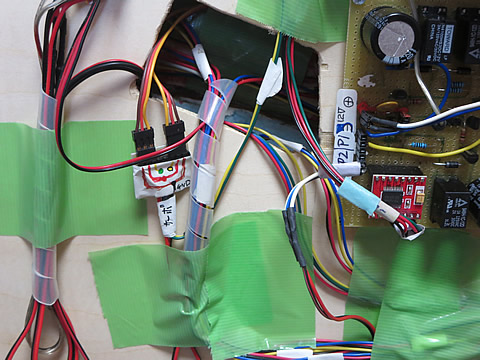
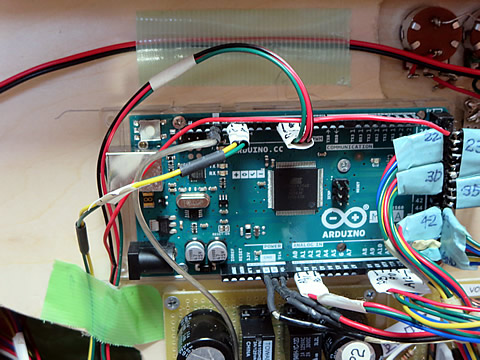
勿論、今までのコンデンサ式ポイント駆動回路の配線は取り外しています。 下左と右の写真。 その代わり、サーボモータ用のPWM線をArduinoをポート11と12に接続しました。
void p1tei_i(){ //ポイント1を定位に
if (myservo1.read()<36 ){
myservo1.attach(11);
myservo1.write(60,10,true);
myservo1.detach();
}
return;
}
void p1han_i(){ //ポイント1を反位に
if (myservo1.read()>34 ){
myservo1.attach(11);
myservo1.write(10,10,true);
myservo1.detach();
}
return;
}
■ スケッチの修正
ポイント駆動回路の変更に従い、スケッチの記述も変更しました。 まず、ライブラリーとして VarSpeedServo を使用し、サーボ変数として myservo1 と myservo2 を設定しました。 これらはポイント1とポイント2を制御させるためです。
このため、ライブラリー使用の宣言として、
#include <VarSpeedServo.h>
を記述し、サーボ変数も設定しました。
VarSpeedServo myservo1;
VarSpeedServo myservo2;
そして、ポイントを駆動するためのコマンドは、右に示すように、p1tei_i() とか P1han_i() などの関数として設定しておきます。 そしてポイントを駆動させる場合には、メインループからこの関数を呼び出して実行させることになります。
サーボモータが待機中にノイズなどで誤作動する事が無いように、この関数内でアタックし、作動後は解放しておくようにしています。
修正したスケッチは、 ⇒ 「ポイントのスローアクション駆動 レイアウトへの組込みスケッチ」に示します。
**********************************************************
試運転の結果、問題なく作動することを確認しました。 そして、丸見えのサーボ部分には、下の写真に示すようなに、プラ板を使ってカバーを設けました。


それでは、試運転の様子を動画で紹介しましょう。

いかがでしょうか。 音が少しうるさいですがこれで良しとしましょう。 このプロジェクトも無事に完了させることが出来ました。
2022/10/14