
HOME >> 鉄道模型自動運転システム > 卓上レイアウトで楽しもう 自動運転 その22
卓上レイアウトで楽しもう 自動運転 その22
先回の「卓上レイアウトで楽しもう 自動運転 その21」(2020/2/19)で、モータドライバを壊してしまいました。 その後、代わりのドライバが準備と調査が出来ましたので、自動運転の実験を再開しました。
■ 運行シーケンスの見直し
運行シーケンスは同じですが、「Arduino Nano Every のPWM出力を調べる」(2020/2/22)にて、PWM制御が可能なポートが5ヶ所であることが判明したので、制御内容を変更する必要が出てきました。 そして、制御ポートの干渉を避けるために、給電のためのPWM制御を、下記の表のように整理しました。

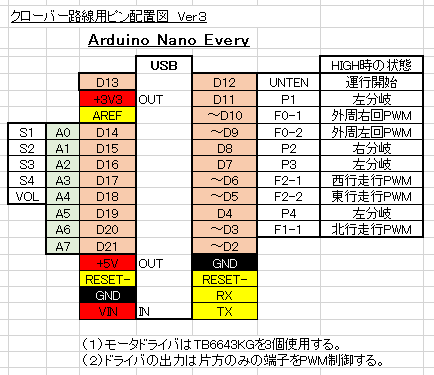
また、Arduino Nano Every のポート配置は下記のように設定しました。
モータドライバを変更し、速度制御用のボリューム(10KΩ)の追加した新しい電気回路図を下に示します。
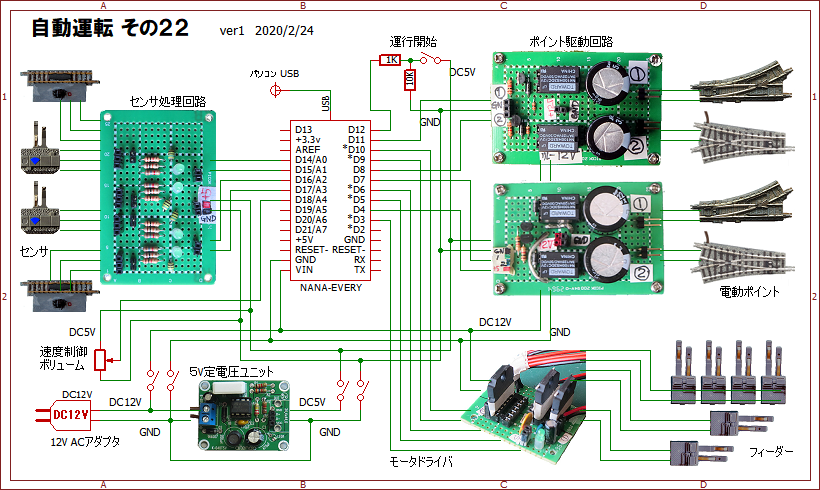
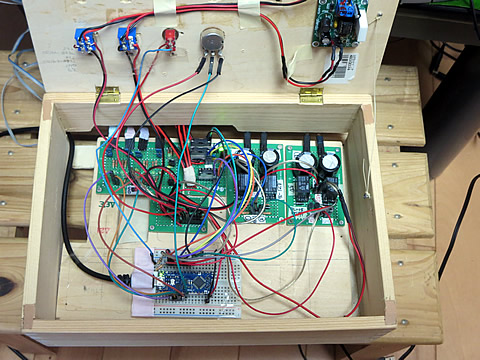
なお、上の回路図の中の写真で示したユニットの内部回路については、「卓上レイアウトで楽しもう 自動運転 その7の4」と「Arduino Nano Every のPWM出力を調べる」を参照下さい。 これらを組込んだ制御ボックスを下に示します。

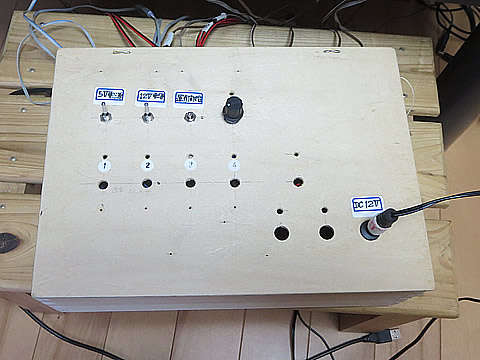
供給する電源はDC12V用のACアダプタのみとなりスッキリとしました。 また、速度制御用のボリュームのツマミもパネルに追加しました。
 .
.
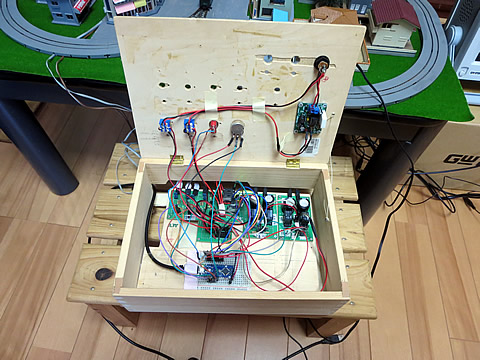
制御ボックス内は、相変わらずゴチャゴチャですで、システム変更に対しても柔軟に対応できると満足しています。
■ 制御用のスケッチの記述と走行テスト
最初に、北東と南西ゾーンだけを、ただ単に8の字走行するパターンとして、モータドライバの作動状態をチェックしました。
そして、問題無く運行出来たので、センサとポイントの作動を追加し、先回のようなトラブルは無いか確認しました。 いくつかのミスを修正し、Bトレ電車、路面電車、そしてポケットラインのチビロコを走らせて、加速や減速停止のタイミングを調整しました。
調整後のスケッチを紹介します。
運行スケッチ ⇒ Every-6D
PWM制御の周波数が約 1kHz と低いため、動きがぎごちなく感じられますし、ピーという音も気になります。 やはり、周波数は高くする必要があるようです。 鉄コレのライトレールとKATOのブラシレスモータを搭載したチビロコを走らせましたが、さすがにチビロコは、低速でスムースに走行しています。
いつもの様に動画を紹介しましょう。
まだまだ、低速走行をさせたいのですが、スタートが問題となってうまく行けません。 スタート時に少しショックを与えるようにデューティー比を与えて、なんとか対応していますが、まだ調整の余地はありそうです。
2020/2/25 作成