
HOME >> 鉄道模型工学 > 車両の静的特性のモデル化と特性解析 その2 その1
鉄道模型工学 車両の静的特性のモデル化と特性解析 その2
■ 車両の定数の測定
車両に関する定数は、車両の重量 Wo 、動輪の直径 D 、および従輪の走行抵抗 R2 、スリップ率 β、坂道の勾配 θ、などがある。 ここで、坂道の勾配θについては平坦路を走行している場合として考えることにより、常にゼロとなるため考慮する必要はないと考える。 また、車両の重量 Wo と動輪の直径 D は、秤とノギスで測定する。 従輪の走行抵抗 R2 は、動力車と一体になっていいる場合には、その測定は難しいので、その値は小さいとして、無視することにした。 また、SLのテンダー車の場合は、切り離して測定することができるでしょう。
問題はスリップ率βである。 トラクションタイヤの特性や車輪の荷重分布などで車両毎に千差万別となるであろう。 測定するには、走行中の動輪回転数かモータ回転数を計測する必要があるが、その方法をどうするか解決していない。 供給電源の脈動からモータの回転数を測定出来ないだろうか? とか、重り車両に積んだ無線機から測定データを飛べせないだろうか? とか考えるのだが、その実現性は不明である。
でも、駆動力が小さい場合には、スリップしているとしても数%程度ではないか、また、駆動時と制動時にはその方向が逆になるはずとの常識から、当面はスリップ率ゼロとして解析を進めることにする。 その一方で、他の要素を仮定してスリップ率を算出する事も出来るので、その傾向も解析する試みも実施している。
■ 減速機構の定数・・・・ギヤ比の実測
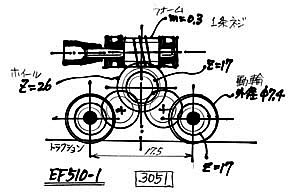
このギヤ比については、歯車の歯数を数えれば計算出来るので、台車部分を分解して必要な歯車の歯数を数えた。歯車は小さな部品であるので、拡大鏡が必要であり、歯の一カ所にマーカーで小さな印をつけてスタート地点の目印として、マイナスドライバーで歯をひとつづつ送って数えて行った。 このNゲージ分野では、モージュールが 0.3 か 0.4の場合が多いようである。 この減速機構の代表的な例を右のイラストで示す。 そして、ギヤ比 i は、
![]()
の関係であるが、「ウォーム軸を何回転させれば動輪を1回転させることが出来るのか」 と考えれば、計算は簡単である。 ポイントは動輪のギヤの歯数、ホィールは2段歯車になっている場合が多いのでそれぞれの歯数、そしてウォームの条数であり、アイドラギヤの歯数は関係ないことを理解しておこう。
この右上のイラストの例では、動輪を1回転させるには、その歯車の歯を17個送っていく必要がある。 そしてホィールの歯数も丁度17枚であるため、ホィールをピッタリ1回転させる必要がある。 中間のアイドラギヤは、動輪から歯が1枚送られてくると、ホィールの歯を1枚ピッタリ送るので、自分の歯数がいくつであっても関係無いことが理解出来よう。 そして、このホィールをピッタリ1回転させるには、ホィールのウォームと噛合う歯が26枚あり、また、ウォームが1条ネジであるため、ウォームを26回転させることが必要であり、このことより、ギヤ比が 26 であると計算される。
最近発売されたKATO のHOモデル EF510 では、2条のウォームを採用したとのことであるが、これは、ウォーム軸を1回転させると、ホィールの歯を2枚送ることになるので、ギヤ比が半分になるのである。
 .
.
■ 減速機構の定数の測定
このゾーンのギヤ比以外の定数は、部品の組合せ状態で個別に測定する方法もあるが、その道具作りが大変であるので手が出ない状態である。 そこで、車両状態での走行データから関係式を使って推定する方法を取ることにした。
1) 車両特性の測定
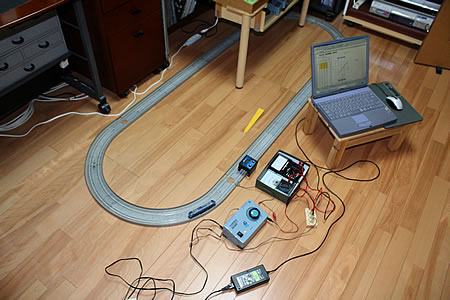
まず、車両状態での走行データを計測しておく必要があるので、他の報告書とも重複するがあらためて説明しておこう。
車両特性として、動力車単体での単機平坦路走行による速度特性をまず、計測しておく。 当初は「傾斜台の改良」で報告した改良版の傾斜台式測定台を水平に設定して測定していた。
しかし、最近ではロングレールを使用したレールを使用することにしている。 その理由は「モータの回転変動」を参照してください。
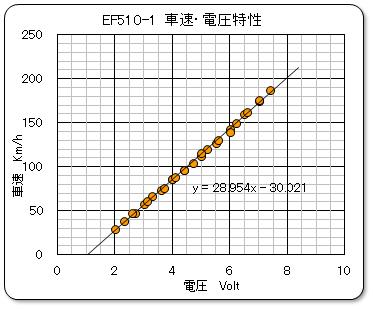
このデータは、速度項の推定に使用するため、注意深く測定する必要性を最近感じている。 モータには避けられない回転変動が有る事を認識し、モータの温度上昇を考えた充分な馴らし運転や、何回かの繰り返し計測などを考慮する必要がある。 計測例として、EF510-1 での測定結果を下に示す。
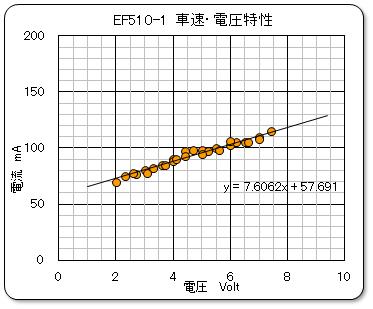
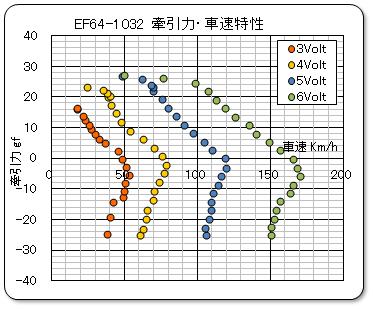
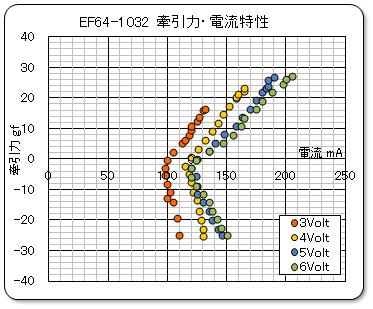
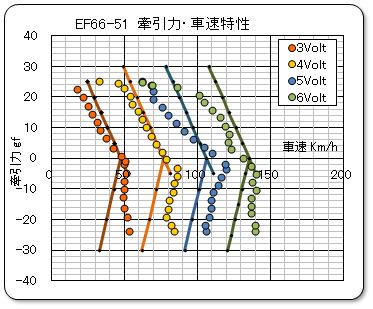
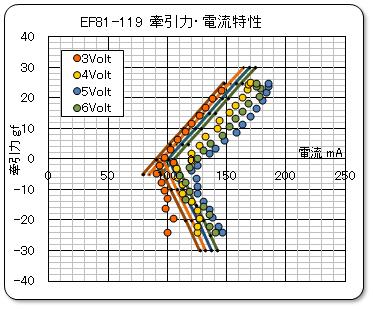
次に、負荷状態での特性として、牽引力特性を計測する。 この測定は、傾斜台式測定台を使用し、牽引力の負荷として重り車両を連結した状態で計測している。 そして、この牽引力特性の測定時には、パワーユニットのダイヤルを中間域でほぼ表示の電圧になるように設定し、上り坂や下り坂での電圧変動は修正せずに連続して測定していた。 これは、モータ単品での測定の場合と違って、データのバラツキを少しでも押さえて、データの連続性を重視したためである。 しかし、解析方法をいろいろ検討してくると、やはりパラメータとしての電圧を一定に保つ方が良さそうなので、今後はダイヤルを修正しながら、測定することにする。 データの一例を下に示す。
2) 効率と速度差の計算
いろいろな定数を推定する前に、効率100%の場合を計算し、実際の値と比較してみよう。
ここでは、電源からのインプットである供給電圧 Es と供給電流 Is の測定データから、集電回路、照明回路、およびモータモデルより、モータの回転数 Nm とモータトルク Tm' が計算されたとし、車両特性の測定データである車速 V と牽引力 Fk のアウトプットデータと突き合わせて、計算するものである。 このため、EXCELを使用して、測定データから個々の場合のモータのアウトプットを計算しておく必要がある。
はじめに、モータの端子電圧 E とモータ電流 I は、
![]()
![]()
で計算し、モータモデルから、回転数 Nm と出力トルク Tm' を計算する。 モータモデルについては、「モータ特性のモデル化」を参照してください。
***************************************
まず、力関係から見て行くと、インプットとしてのモータトルク Tm' とアウトプットとしての動輪トルク Td の間には、ギヤ比によるトルク増幅のみで関係付けられ、
Td = i ・ Tm'
となるが、この値を分母として、測定された牽引力 Fk を動輪トルク Td に計算して、その比率を求めると、この駆動機構の効率と見ることが出来る。 即ち、
効率 η= Fk ・D /2i・Tm'
となる。 ここで、R2 はゼロとして無視している。
また、速度関係を見て見ると、減速機構での速度関係は、歯車機構でガッチリと規制されているのでギヤ比のみで連動している。 しかし、前にも述べた様に、動輪の回転数と車速の関係は、動輪のスリップによって速度差は発生している。 ここで、スリップ率をβ、車速をV 、モータ回転数をNm とすると
速度差 = 1- β = i・V /πD・Nm
となる。
これらの例として、下のグラフに計算例を示す。
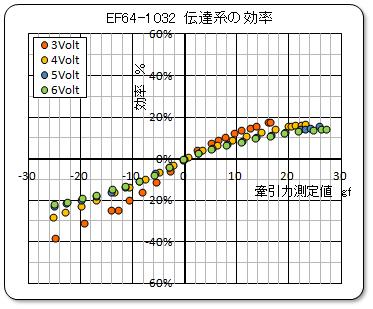
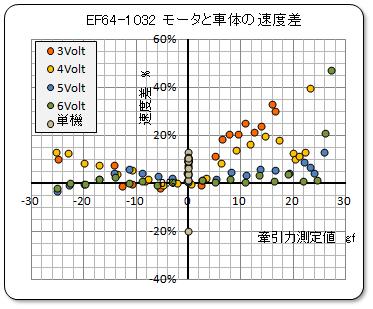
この計算例から見ても、左の効率のグラフはなるほどと思えるが、右の速度差のグラフは変だなと気付かれると思う。 この原因は、力の関係は電流値に関係し、速度関係は電圧値に関係すると言うことと、電流値は、照明回路の定数を把握しておけば、ほぼ正確な値を計算することが出来るのに対し、一方の電圧値は、集電回路の電圧降下という曲者が介在し、モータの端子電圧の計算値が怪しいためと推察している。
3) 速度項の推定
 .
.
減速機構の損失トルクの説明において、「速度の項」と「力の項」を分離して考えることを前に述べたが、ここでは、その項目の定数を推定する方法を説明しよう。 この速度の項は、損失トルクを回転数に依存する成分に分離し、その回転数は入力側のモータの回転数 Nm とすることにしている。
この速度に依存する損失トルクの推定には、単機平坦路走行における電圧・電流特性のうち、電流値の測定データに注目して推定することにする。
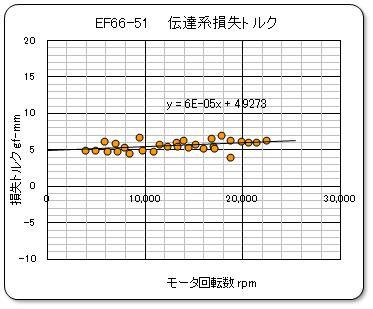
モータの出力トルクは、減速機構の摩擦抵抗に食われて、残りのトルクが動輪に伝達される。 しかし、動輪まで伝達されたこの有効なトルクではあるが、単機平坦路走行の時には動輪の駆動力を殆んど必要としていないので、抗力項の影響が少ないはずである。 そこで、この時の電流データからモータに流れる電流を計算し、モータの出力トルクを求め、この時のモータ出力トルクを損失トルクとし、 モータ回転数との関係をグラフ化する。 その一例を右に示す。
ここで、「速度の項」に関する損失トルクを Tn とすると、
![]()
で表わせるので、右のグラフにおいて、直線近似した時の勾配値を、λd と推定することが出来る。
なお、右のグラフの例では、回転数に依存する損失トルクは、固定的な損失よりも、非常に小さいことを示している。
4) 抗力項の推定
次に、「力の項」としての抗力項について検討する。 ここでは、牽引力特性の測定データを使用して損失トルクを計算しようとするものである。
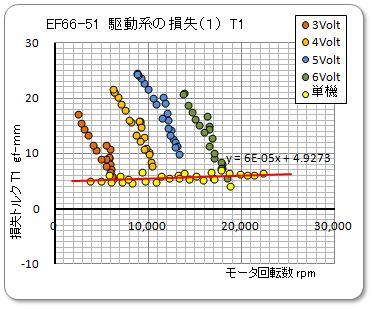
まず、動輪に掛る実際の駆動トルク Td をギヤ比で割ってウォーム軸上の換算トルクとすると、このトルクは、有効に動輪まで伝達作用された有効トルク と見る事が出来る。 そこで、電流データから計算されたモータの出力トルク Tm' を駆動機構の入力トルクと考え、換算した有効トルクの差は、駆動機構で失われた 「駆動系の損失」 と見る事が出来る。 そこでこの値をT1として計算すると、
T1 = Tm' - Td/i
となり、このデータをモータ回転数を横軸にグラフ化したものが、下の左のグラフである。 ここでは単機走行時のデータも同じように計算してプロットしている。
 .
.
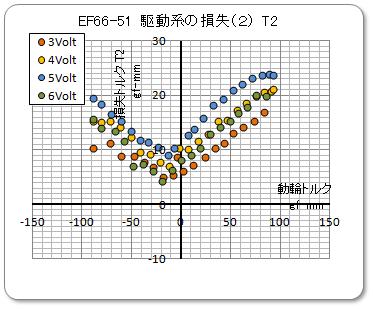
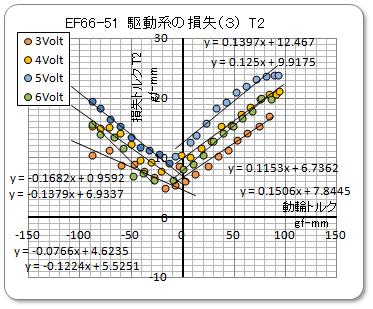
この損失トルク T1から前記の速度項 Tn を差引いたトルクを T2 とすると、上の右のグラフになる。 ここでは、横軸を動輪トルクに取っている。 その理由は、動輪トルクが駆動時と制動時ではプラスとマイナスになるため、その状態をグラフの左右に分離出来るからである。 そして、ウォームギヤの噛合い状態も変化するので、その違いも観察できるのである。 左のイラストに示すように、(A) が駆動状態、(B) が制動状態を表わしているが、ギヤの回転方向は同じでも、ホィールに掛る力の方向は逆転し、歯面の当たりも表側と裏側との違いもある。
この損失トルク T2 のグラフを見ていると、損失トルク T2 はV字形をしており、その谷底が少しズレていることが鮮明に見てとれる。 このことは、動輪トルクがマイナスになっても、ウォーム軸側のトルクは同じ方向のままであることを示しているが、ウォーム軸の回転方向に変化が無いので当然と言えば当然な事である。 そして、V字形の勾配に注目すると、この損失トルク T2 は動輪トルクと比例関係にある事も明らかである。 即ち、抗力項を Tt 、動輪トルクを Td とすると、
![]()
の関係があるとしているため、この勾配の値を求めれば、その値が抗力項の係数 R7 、即ち一種の摩擦係数と推定することが出来るのである。 そこで、同じグラフを使ってその勾配を直線近似させたグラフが下の左のグラフである。
このグラフを作成する時に、測定データを良く観察し、V字谷の底の位置を確認する必要がある。 この点を境に谷の左右が分離されるので、この点を「制動領域での動力特性」で述べた様に、遷移点と呼んでいる。 この点はウォームギヤに掛る力の形態が変化する点であり、上のイラストに於ける(A) と(B) の状態を分ける点である。 測定データを見ていると、電流値が最も小さくなっていることや、いろいろな特性線図が折れ曲がっている点であるので、大体は判別出来る。 また、この遷移点がマイナスになっているのは、動輪系の摩擦損失によることも既に説明している。
この遷移点を確認し、駆動域と制動域を別々にグループ分けして近似直線を当てはめなければならない事や、データによっては怪しいデータがあるのでそれを見極め無ければならない事などが注意点してあげられる。
このグラフより、パラメータ毎の勾配値を求め、それを平均して駆動側と制動側の抗力項の係数 R7 の推定値とするのである。
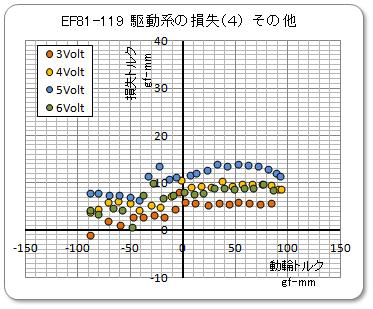
この損失トルク T2 からさらに、今求めた係数 R7を用いて抗力項 Tt 計算して差引いた損失トルクの残り分を右上のグラフに示す。 このグラフは、速度や抗力に関係しない損失トルクを示している事になり、各部の固定的な損失抵抗などがあ考えられる。
■ いろいろな特性解析
これまで求めてきた車両モデルと定数を使用し、いろいろな観点から動力車両の特性を検討してみることにした。
 .
.
1) 損失トルクの内訳
前述のように、減速機構の損失トルクの内容を観察することが出来るようになったが、グラフなどを見ていても、いまいちピンと来ないのである。 そこで、グラフの表示方法を工夫してみた。
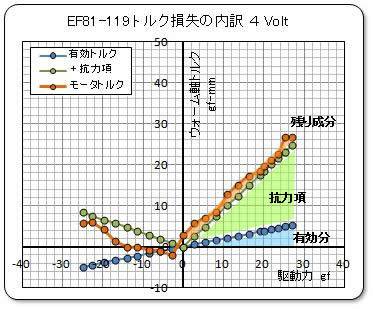
モータから作用したトルクが有効に動輪まで達した有効トルクと、それに抗力項をプラスしたもの、さらに、速度項をプラスしてもの、および、モータトルクを重ねてグラフ化したものを、電圧パラメータ毎に作成した。 そのグラフの一例を右に示す。
各線図に囲まれた部分が、有効トルク分、抗力項、速度項、そして残り分を示すことになるが、このグラフでは、速度項が殆んどゼロであったため、表示されていない。
こうして見ると、モータの出力トルクの多くは、抗力項に消えていることが分かる。 この原因はウォームギヤに有ることは明らかであろう。 普通の平歯車はコロガリ接触で力を伝達しているが、ウォームギヤは直交に交わる運動方向での滑り接触によって力を伝達している。 このため歯面の抗力による摩擦抵抗によって、その損失量が大きいのである。 そしてウォームギヤの伝達効率が20%程度であることも理解出来る。
制動側での線図の動きも面白そうである。 有効分と抗力項の補い合いや、その他の項との関係、また、最終的に必要となってくるモータの駆動トルクなど、「制動領域での動力特性」での考察と比較しながら検討するのも今後の課題としよう。
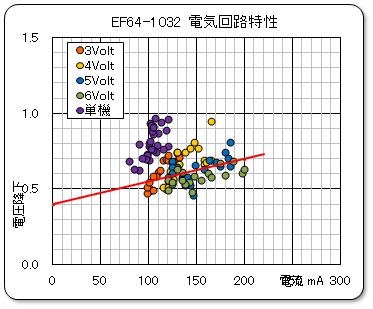
2) 電圧降下量の推定
いろいろな定数がそれらしく推定出来るようになったが、電気回路に関してはいまだに適切な手法が見つかっていな状態である。 走行中のモータ端子電圧E が直接測定出来れば問題ないのであるが・・・・・・・・・。
 .
.
ここで、最初の特性ブロック図に振りかえって考えてみると、モータの端子電圧E を他の測定データから計算出来れば、供給電圧Es との差によって電圧降下量を推定出来るのではないかと考えた。
即ち、車速V からモータ回転速度Nm を、牽引力Fk または供給電流 Is からモータトルクTm' 、または、モータ電流 I を計算し、その値からモータモデルにて端子電圧E を計算すればよいはずである。 しかし、この逆ルートの計算には多くの定数が絡んでくるので誤差が大きくなる恐れがある。 そこで、ある程度の誤差を覚悟の上で単純なルートで計算することにする。
まず、スリップ率は、粘着領域での車輪の空回りを除けば、数%程度と見込んで、スリップ率ゼロと仮定して計算する。 これによって、モータの回転数Nm は、
Nm = iV/πD
にて計算出来る。
次に、モータトルクTm' については誤差が大きくなると見ているので、モータ電流 I を計算することにする。 しかし、供給電流 Is からモータ電流 I を計算するには、照明回路に分流する電流を計算する上で、求めようとする電気回路の電圧降下が関係してしまい、計算上の矛盾が起こってしまう。 しかし、分流する電流量は小さく、さらに電圧降下による分流する電流量への影響も小さいと言う事を考えると、他の方法で当てはめている電圧降下量を使って計算しても、誤差は10%以下と見込んで、このルートの計算式を使用することにする。 即ち、
モータ電流の計算を、 I = Is - (R3*E + R4)
として計算し、この式で用いる電圧 E の式は、
仮のモータ端子電圧 E = Is - (R5*Is + R6)
で計算した値を用いることにした。
 .
.
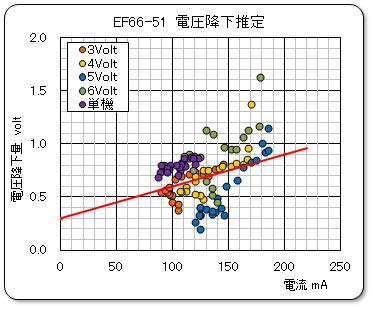
この考えに基づき、電圧降下の推定値を計算してみた。 その例を上のグラフに示す。 ここで、赤線で示したラインは、仮のモータ端子電圧の式に使用した
電圧降下 = R5*Is + R6
を示している。
このグラフの信憑性には自信が無いが、それにしても良くバラツイテいるなと感心して見ている。
駆動状態に於いてはスリップ率がプラスとなり、電圧降下量にはプラスとして計算されてくるので、スリップが大きくなると上に大きき飛び出すことになるので、こうした点は除外して考えるべきであろう。 制動状態では逆になるので、下に大きく外れるはずである。 また、車速に関係するかも知れないと思って横軸を車速の取ってみたがその傾向は見られなかった。
模型車両の動きがギクシャクしてくると、車両を分解して接触部分を掃除することは、鉄道模型ユーザーであれば常識ともなっている。 これは、取りも直さずこの電圧降下量が大きくなってしまい、モータ端子電圧が下がってしまうからに他ならない。 また、室内灯のちらつきもここに原因していると考えると、この程度のバラツキは当然かも知れないと思えてくる。
また、モータの代わりに12Ωの固定抵抗を接続し、レール上を転がしながら抵抗を測定した事を前にも述べたが、その時の計測値があまりにも小さいので、NGと判断したのはこの推定値の差を見比べて、判断したものである。 上のグラフに示す。
3) 速度特性の検証
平坦路単機走行時の測定データについて、今まで求めてきた定数とモデルを使用して計算してみよう。 そして、実際の測定データと重ねて見ると、下のグラフにその一例を示す。 計算値は黄色いポイントでプロットしてあり、赤い線で結んでいる。 この単機平坦路走行のデータについては、電圧降下の係数をもう少し修正すれば、ピッタリと合わせる事が可能であるが、上記の電圧降下推定のグラフでも示すように、他の状態ではマッチしなくなるので、そのバランスを取って推定した値を採用している。
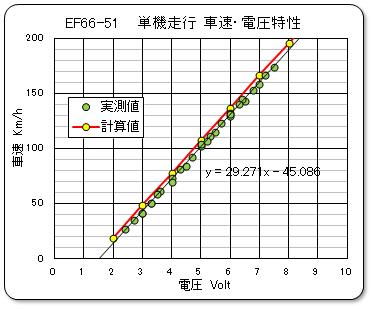
しかし、計算値がこれだけ合致すれば充分ではないかと評価している。
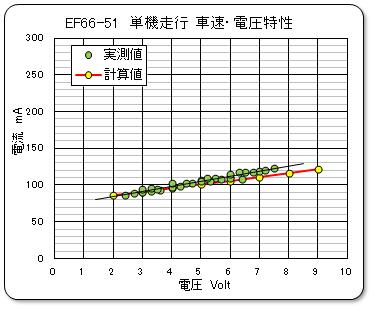
4) 牽引特性の検証
次に、牽引特性についても、同様に計算値と実測値との比較を行った。
この特性では、傾向は似ているものの、値のズレが大きいようである。 それは、データを測定している時に厳密に電圧を一定に保っていない事も原因の一つとして考えている。 測定値の連続性を重視して電源のダイヤルに手を付けないようにして測定したからである。 測定時には電圧も 0.05 volt 単位まで目を凝らして読み取っており、特性値の解析にはそれを反映させているので、何ら問題はないのであるが、この様なグラフとしてまとめる場合には、不都合な測定データとなってしまっている。
とはいっても、スリップ率の値が考慮されていないことや、怪しい電圧降下量の推定など、まだまだ充分ではないと考えているので、当面はこれで良しとしておこう。
■ 実際の計算方法
実際の計算方法については、 EXCEL の計算シートを使用し、必要な欄に計算式を埋め込んで計算し、求められた値をグラフに表示するようにしている。 データ数、計算欄、およびグラフが多くなっているので、横と縦が、36×300 マスにもなるシートとなってしまった。
ここでも定数の推定欄は、一か所にまとめ、各計算で必要となった場合には、参照セルのセル番号を$記号付きの絶対参照として指定する。 また、グラフは、そのままコピーしてホームページに活用出来るよう大きさを揃えている。 なお、モデルにもとずく計算値を求める場合には、初期値を設定して簡単な逐次近似手段を用いている。
概略の計算手順として、
- 測定データを整理して測定データ欄に貼り付ける。
- モータ、減速部、ライト基板、車両など定数を指定の欄に記入する。
- 牽引力特性のデータは、抗力項の計算時に必要となるため、牽引力値の大小が順になるように並び変える。 そして、遷移点に色などのマークを付けておく。
- モデルにもとずく計算値を表示するための、初期値として必要な値を計算用設定欄に記入する。
- 所定のグラフより、速度項や抗力項の係数を推定する。
- 速度特性と牽引力特性における計算値と実測値の比較から、電圧降下関係の係数を修正する。
■ まとめ
今回は、モータに引き続き、車両特性に関してもなんとかモデル化出来たと考えている。 この解析手法を使って、SLや電車の動力を分析したいと思っているが、いろいろ改善の余地があるため、なかなか前に進む事が出来ていないのである。 何度も計算式修正したり、データの取り直しをしてみたりして、3歩前進、2歩後退の状況であるが、ホビーとして楽しんで進めて行きたい。