
HOME >> 鉄道模型工学 > μ特性を測定しよう 測定装置の検討
鉄道模型工学 μ特性を測定しよう 測定装置の検討
鉄道車両や自動車の駆動力は、レールや路面と接する駆動輪によって発揮されます。そしてその特性は回転する物体の摩擦特性、μ特性として説明されていますが、我がNゲージの鉄道模型においても、このμ特性を測定しようと挑戦しています。
 .
.
■ μ特性測定装置のアイディア
この装置を思いつくまでのいきさつは、先回の報告「μカーブから発進特性を考える その2」(2025/8/23)にて説明しましたのでご参照ください。
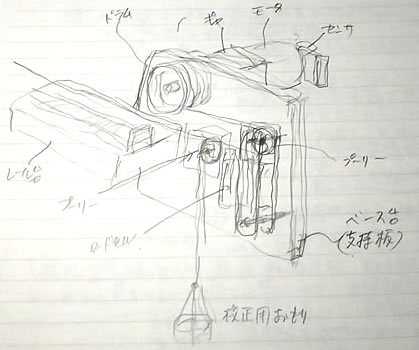
まず、アイディア・スケッチを描いてみました。右の図です。測定車のカプラーを引っ張る糸をプーリーを介してドラムに巻き取っています。そして、糸を巻き戻しながら測定車を走行させます。この時の糸の張力をプーリーに設けたロードセルで測定します。
測定は、測定車のモータ回転数から動輪周の速度を、巻き取りドラムを回転させているモータの回転数より糸の巻き出し速度、即ち測定車の車速を計算し、動輪とレール間のすべり率を計測します。
この時の、動輪周引張力は糸の張力と等しいので、ロードセルの測定器から求められます。即ち、あるすべり率の時の摩擦力が求められることになります。
巻き取り装置の回転数を変えたるとすべり率を変化させるkとが出来るので、これらをまとめると、その動力車のμ特性としてグラフにすることができるはずです。
糸の張力は、校正用錘を使って実施できるようにしておきます。
***********************************
■ 測定装置の部品を揃えよう
まず、このアイディアを実現させるための仕様を書き出しておこう。
- Nゲージ動力車を測定対象とする。
- このため、最大の連結棒引張力は 50gf としました。
- レールは直線距離で 150c㎝ 程度とし、往復運転をさせる。
- 測定時のスケールスピードは、最大 50Km/h 程度とする。
- 測定は自動測定とし、そして自動運転も実施したい。
今回の装置の要である巻き取り装置について、適切な部品を探すことにした。ポイントは、モータの回転数が計測できるようにエンコーダ付きのギヤードモータとし、ネットにて適切な部品を探しました。そして、Pololu社のエンコーダ付き超小型メタルギアドモーター HPCBを探し出しました。これは、ロボテックス用超小型駆動装置であり、今回の目的にはピッタリである判断し、関連部品も揃える事にした。
- 駆動装置は、トルクや回転数からギアレシオ: 75.81:1のPOLOLU-3074を選定する。
- ドラムは、ストック品としていたタミヤ の OP.453 ミディアムナロー6本スポークホイールとする。
- 超小型メタルギアドモーター用ブラケット・・・・・・・取付部品
- 12 mm六角ホイール アダプタ(3 mmシャフト用) ・・・・・・・・・ホイール取付部品
- 超小型メタルギアドモーター用磁気エンコーダペアキット(サイド型)・・・・・・回転数計測センサと処理回路
- 片端6P SHタイプコネクタ付ケーブル(30cm)・・・・・・・モータとセンサ用の専用ケーブル
- HX711搭載 ロードセルアンプモジュール・・・・・・・ロードセル用の処理回路として新品を補充する。
- べアリング付き小型プーリの補充。
この他、ロードセルなどの必要部品は、手持ちの部品から選定した。
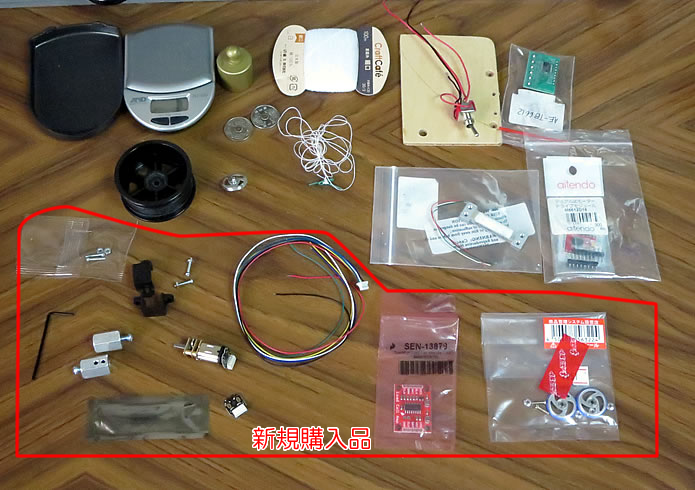
これらの部品を上に示す。
■ 巻き取り装置の機能チェック
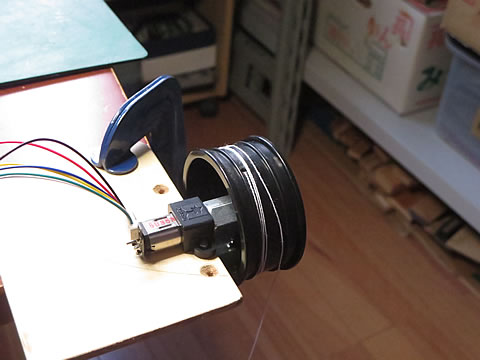
ロボテックス用超小型モータと言えども、あまりにも小さいので簡単な機能チェックを実施することにしました。関係する部品を下左の写真に示します。仮組付けを実施した状態を下右の写真に示します。
巻き取りドラムは、タミヤのタイヤ付き車輪でしたが、タイヤを外し中央部の溝の文字部分を削って綺麗にしました。ドラムとしての直径は φ48mm でした。それにしても駆動部は小さいですね。


 .
.
この部品をベニヤ板に取り付けて、工作机の端に固定した状態でテストを実施しました。右の写真に示す。 巻き取りドラムの部分には糸を巻き付け、糸の先端には 100 グラムの分銅を結びつけ負荷としました。

モータの電源は電圧が調整できるように安定化電源を使用しました。モータ配線ケーブルは、モータ用電源端子のみ接続しています。

試しに、ホイールに力を加えると手でも回すことが出来たので、一瞬、いやな予感がした。 あれー! 逆回転が容易にできるぞ?
そこで、錘を上の部分まで巻き上げて手を離すと、錘は下がりませんでしたが、少し力を加えると、スルスルと下まで落ちてしまいました。機器の摩擦は小さいようです・・・・・・・・・。 勿論、モータを駆動させるとスルスルと巻き上がって来るので問題なさそうですが、本当にこれでよいのか不安になってきました。
■ 逆転スイッチを付けて回転をチェック
回転方向をスイッチで変更できるように、3ポジションのトグルスイッチを回路に追加しました。下の写真。

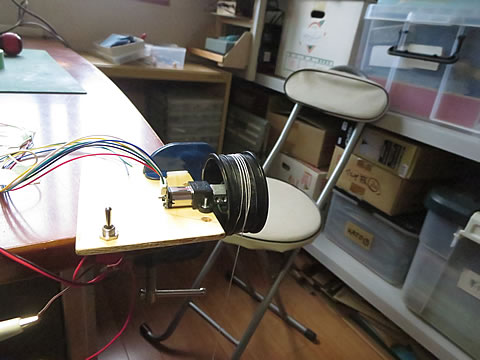
巻き上げ方向にはスムースに動きますが、反対方向に変更するとそのまま下がって行きます。これはスイッチとしての機能としてはOKなのですが、下がって行く時のスピードが制御できませんでした。
勿論巻き上げ時のスピードは電圧を調整すれば速度l調整が可能です。でも下りの場合は電圧を小さくしてもスーと下がってしまいます。そこで錘を 50円玉2個に変更して同じようなテストを実施してみました。約 10グラムの重さですが、下りの速度制御は少しは可能なものの、微妙な感じでした。
この状態まで来て、初めて気が付きました。 この方法ではダメだという事に!
**********************************************
■ 反省
 .
.
今回、働かせようする機能は特殊な状態であることに、やっと気が付きました。負け組の制御が必要な状態なのです。
・・・・・ボケが進んだようです。
同じような状態を昨年経験していたのですが・・・・・・・。小型ターンテーブルを使っての低速回転時のコントロール方式と同じ状態なのです。
この「勝ち組の制御」と「負け組の制御」について、右のイラストを使って説明しましょう。
今、検討している動力車の測定状態は、同じロープを使ってお互いに引っ張り合っている綱引き競争と同じ状態と考えられます。 綱をドンドン引っ張って行っている勝ち組は、行け行けドンドンの積極的な制御、即ちアクティブ制御の状態です。力を掛けている方向に進んでいるのです。
一方のズルズルと引っ張らている負け組では、力を掛けて踏ん張っているのですが、力の方向とは逆の方向に進んでいるのです。ブレーキをかけている制御、即ちパッシブ制御の状態なのです。
そして、勝ち組は試験しようとする動力車であり、負け組はその引張力を測定しようとする装置側なのです。そして、一般的なモータ制御は、この勝ち組の制御を実施しています。一方の負け組の制御の例は、電車の電気ブレーキ、あるいは回生ブレーキと言われるブレーキ制御などであり、モータを発電機として使用してブレーキをかけている発電状態なのです。
しからば、この発電状態における回転数制御を実施すれば問題は解決できると考えて、その方法をネットで調べてみました。
・・・・・・・・ でも、参考となる解説情報は見つかりませんでした ・・・・・・・電気回路に対する知識に乏しい小生としては手が出せません。
***********************************
こうなると、メカに頼るしかありません。出力側の力のフィードバックを断ち切る逆効率ゼロのウォームギヤを減速機構として使うことにします。そう言えば小型ターンテーブルの場合も最終的にこの減速機構を採用していましたね。
方針変更です。 エンコーダ付きモータを諦めて、タミヤのテクニクラフトシリーズNo.4 ウォームギヤーボックスHE を使い、モータの回転数を検出する細工を実施することにします。