
HOME >> 鉄道模型実験室 > KATO C62 2 と隠れ補機
鉄道模型実験室 KATO C62 2 と隠れ補機
■ いきさつ
KATO C62 2号機 北海道形がさる2011年11月25日に発売されました。 外回りは、C62東海道形と同じようにディテールもしっかりしています。 自分が興味を引いたのがD51 498 (品番: 2016-1)に準じた新規の動力ユニットを採用している点です。 モータがコアレスモータを採用しているとのことと、重連時の下り坂での走行がスムースになったとKATOのホームページで宣伝している点でした。
そこでさっそく特性を測定してみましたが、今までとは異なる点に気が付きました。 電圧の変化が大きいことです。 高低差のあるレイアウトでは、下り坂になると暴走気味にぶっ飛ばして下っていきます。 このとき使用していたパワーパックはTOMIXの N-1001-CL でした。 この状況については、先回、KATO C62 2 とパルス制御式パワーパック にて報告しました。 そして、“隠れ補機”として鉄芯入りのモータを使用した電車の動力ユニットと重連させるアイディアを提案しました。
今回、下の写真のように、その隠れ補機を実際に作ってみましたので報告します。

■ 「隠れ補機」用の車両の製作



まず、隠れ補機として C62 にマッチするように、動力付き旧客車を製作することにしました。
動力ユニットは中古品を入手した。 KATO のモハ 209-500 の動力ユニットである。
・209系500番台 京浜東北線色6両基本セット (品番:10-267)に使用されていた。
・
フライホイール搭載、小型モーター 、 サスペンション機構搭載。
車体は、GM の 客車ボディーキット No.133 スハフ43形式を使用し、組み立てることにした。 この種のキットは幾つか作った事があるので要領は得ている。
動力ユニットと車体の長さはピッタリであったが、カプラーを見てハタと手が止まってしまった。 動力ユニットのカプラーは、車体マウントの密連カプラーなのである。 機関車や客車には、カトーカプラーNか、ナックルカプラーを使用しているので連結出来ない。 台車マウントにも変更できないし、かと言ってボディーマウントの密自連カプラーは無いし・・・・・・・・・。 そこで、ナックルカプラー長(Z01-0239)を使用し、プラ板を使って細工することにした。 すこしいかついが側面から見ると違和感が無いので、機能優先で良しとする。
次に、何時ものように室内灯を細工する。 今回は少し改良して、2mm厚さの小型角型クアレンズ白色LED (LSQLED-W4020)を用い、2mm厚さのアクリル板を105×10×2mm に切り取って導光板とした。 KATOの新しいクリア室内灯を参考にさせてもらったもので、
アクリル板から切り取った側面のみをやすりで削ってスリガラス状にしたのみで、奥の方まで綺麗に照らす事が出来ている。
残念ながら、この車両の室内は座席が無いためのっぺらぼうとなってしまっているが、今後の手直しの対象とする事にしよう。
実際のレイアウトを走行させて、走行性や連結部の状態を確認し、問題は無かった。
■ 動力特性の測定方法
動力特性の測定は、傾斜台を使用して実施した。 下の左の写真はその全体を写したものである。 測定装置は、アナログテスターを使用して、電圧と電流を測定する。


車速は、理化学ショップのBeeSpi(ビースピ) 簡易速度計測器を使用する。 問題のパワーパックは、TOMIXの N-1001-CL を使用する。

動力車への負荷は、傾斜と共に、85グラムの重り車両を連結させて走行させた。
各車両の重量:
・C62 2 87.7 グラム
・スハフ43 65.1 グラム
・重り車両 85.0 グラム 走行抵抗 0.5 グラム
測定は、各車両毎の特性と重連時の特性を測定する。 牽引力を測定する場合には、データの重ね合わせを実施したいため、電圧を常に 5.0 Volt となるようにパワーパックのダイヤルにて調整を実施している。
また、C62とスハフ43の速度を比較すると、80Km/h 付近ではC62の方が少し早いので、重連時はC62を前に置く事が出来た。 速度差も少なく、かつ前に置きたい車両の方が足が速いと言う、重連時のセオリー通りの状態を作る事が出来た事は、ラッキーであったと言える。
■ 測定データ
◆ 本務機C62 2号機の特性
KATOのC62 2号機の測定データは、「KATO C62 2 とパルス制御式パワーパック(上記で紹介済み)」に記載したデータをそのまま転記する。
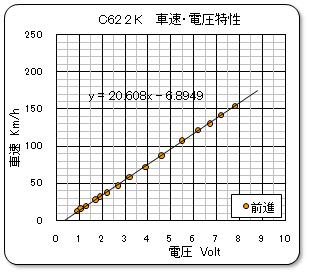
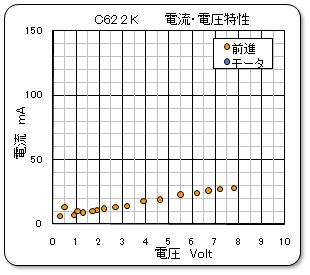
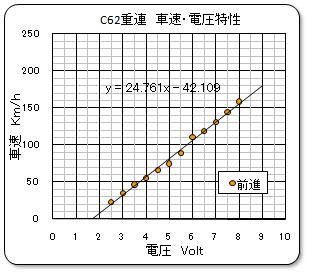
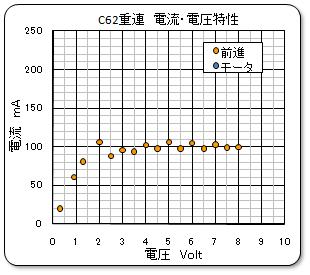
低速では、 1Volt 前後から動きだし、そしてゆっくりと、かつスムースに走行する。 そして、消費電流も非常に小さい。 およそ 4Volt ではスケール速度が標準的な 80Km/h となり、5Volt では 100Km/h となる。
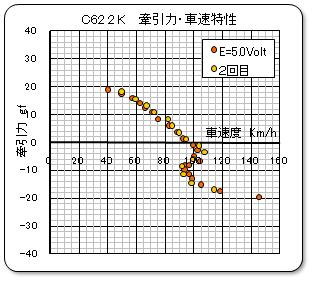
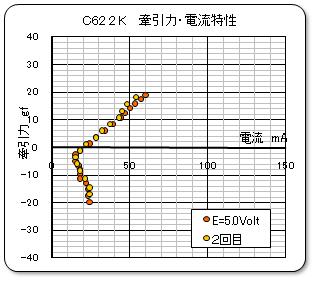
この 5Volt 一定の状態で牽引力特性を測定する。 粘着領域での牽引力はおよそ 20 グラムであり、制動領域では明確なS字特性を示していた。 しかし、走行は何ら不具合は無かった。
この時の測定は、先にも述べた様に、電圧を常に 5.0 Volt となるようにパワーパックのダイヤルにて調整を実施しているので、 実際のレイアウト走行時とは様子が異なっている状態のデータあることに留意して下さい。
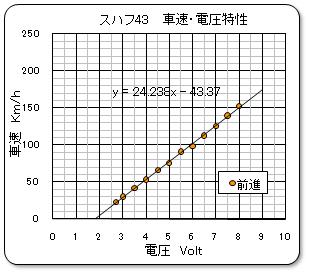
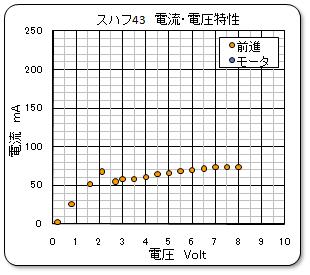
◆ 隠れ補機スハフ43の特性
次に隠れ補機のスハフ43の特性を示す。 フライホイール付きの最近の動力ユニットであるのためか、スムースな走りであり、消費電流も比較的小さい。
標準的なスケール速度 80Km/h を出すためには、5Volt 必要でやや遅めの設定の様である。 でもC62 の補機にはピッタリの特性である。
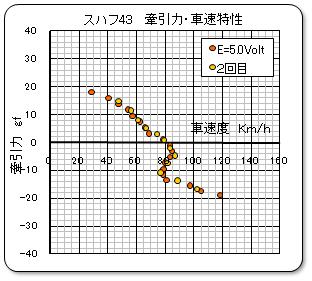
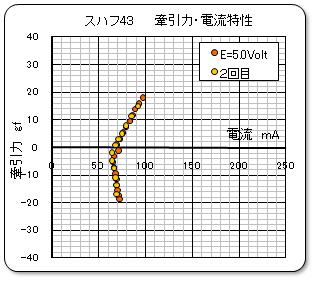
粘着領域での牽引力は、車体が軽いにも関わらず、およそ20グラムもあり、強力な助っ人となりそうである。
制動領域では明確なS字特性を示しており、重連時に悪さをしないかやや心配でもある。 しかし、走行は滑らかであり、下り坂でも何ら問題は無い。
◆ 重連時の特性
次に重連時の特性を測定した。 平坦路でC62 2号機を本務機、スハフ43を後補機として重連させ、重り車両は連結していない無負荷の状態で走行させた。
車速・電圧特性では、ほぼ足の遅い車両に合わせてた特性となっているが、これは理屈の通りである。
また、消費電流は単機毎の電流を加算した値となっていないのも、これも理屈の通りである。 一般には、二つの車両の電流値は加算となるのであるが、速度の異なる車両の重連状態では、お互いに引張やっこか、押しやっこをしているはずであり、このためにそれぞれの動力車にとっては無負荷状態では無いのである。
次に牽引力を見てみよう。 重り車両の重量不足により、粘着領域での牽引力までは測定出来ていない。
重連時の特性は、単機走行と異なり、いろいろな変曲点が出現する。 牽引力が大きい領域から10グラムまでは、速度変化が少なく滑らかに推移するが、10グラム以下からはデータが少しふらついた様相を呈し、制動領域に入る。 この時、走行は滑らかではあるが、走行音がやや大きくなった感じがする。
そして制動力が20グラム付近からまた変化している。 この後、さらに下がって行き、スリップ領域に入っていくものと思われる。
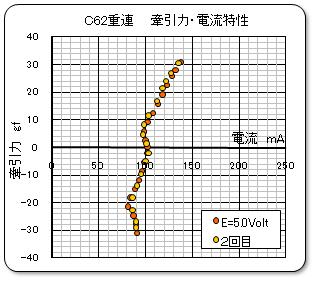
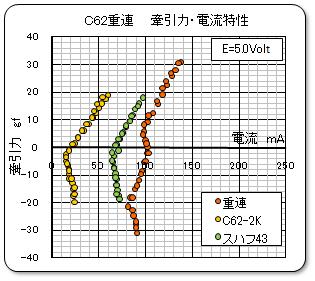
牽引力・電流特性を見ると、この牽引力10グラム以下から制動力が20グラム付近までのゾーンでは、電流値が膨らんでいるのが分かる。
このような現象を理解するには、単機走行時の特性と重ねてみると理解しやすい。 まず、重連時では、
- 供給される電圧は同じである。
- 編成内の車両の速度は同一である。
- 牽引力は合算される。
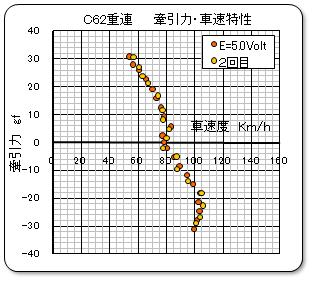
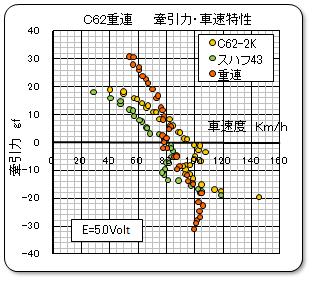
である事を念頭に置いて考えると、グラフ上の特性を単純に足し合わせる事の出来る特性は、牽引力・車速特性のグラフだけである。 そこで、重連時と単機走行時の特性について、電圧 5Volt の状態でのグラフを右に示す。
まず、 牽引力・車速特性を見てみると、40Km/h では、2両の機関車は、19グラム+16グラム=35グラムの牽引力(計算上)を発揮して協調して運転しているが、負荷が10グラムまで少なくなると、80Km/h まで速度が上がる一方で、スハフ43は牽引力ゼロまで低下する。 これより負荷が少なくなると、C62 はスピードを上げようとするが、 スハフ43側が「イヤだ!」と言いだし、ブレーキを掛けてくるので、スピードを上げる事が出来ない。 重連する機関車同士の引張やっこが始まるのである。 スハフ43のブレーキ力が大きくなるにつれてスピードも少しダウンしてくるが、スハフ43のブレーキ力が10グラム前後で、C62 の牽引力とバランスし、合算牽引力はゼロとなる。 即ち、無負荷の重連状態となる。
その後、負荷が制動状態となると、スハフ43のブレーキ力がC62 の牽引力を上回ることにより、スピードを少しずつ上げながら対応している。 しかし、スハフ43に於いてはすでに制動側のスリップ状態に陥りながらも走行し、C62 の牽引力の牽引力がゼロまで下がると、その後はC62も制動状態に入る。 その後は、両方の車両が制動状態で対応することになる。
牽引力・電流特性のグラフを見ると、単機走行の場合には綺麗なくの字形の特性を示しているが、重連時には中間部が膨らんだ特性となっている。 この間は二つの機関車同士が、引張やっこがを行い、無駄に動力を消費しているからである。
このように重連時には、両動力車共に駆動力を発揮している駆動側の協調運転領域と、制動力状態にある制動側の協調運転領域と共に、駆動力と制動力とで喧嘩している干渉運転領域が存在する。 この干渉領域では色々な問題が発生するので、重連状態をスムースに運転させるには、この領域を狭くすることと、干渉する力を小さくする事が必要となってくる。 このためには、駆動領域から制動領域に移行するポイントを合致させる事が唯一の対策となる。 同時に駆動領域から制動領域に移行すれば干渉領域はゼロとなるのである。 この移行するポイントとは、無負荷走行状態のことであり、他ならず単機平坦路走行時の状態を示ししている。 この時の速度が合致すれば、重連状態でも、即ち同じ速度で駆動領域から制動領域に移行することになり、干渉状態は発生しない事になる。 おうおうにして、電圧によって速度の変化が異なるので、走行させたい速度状態で合致させることも必要であろう。
今回の組み合わせでは、速度差も少なく、かつ前に置きたい車両の方が足が速いと言う、重連時のセオリー通りの状態を作る事が出来たてラッキーであったと思っていたが、より詳しく見てみると、まだ問題があったようである。 さらに速度差の小さい組合せにする必要があるようであるが、抵抗挿入による調整では速度を下げる方にしか調整出来ないので、C62側の調整が必要となってくる。 これは手が出せない工作になってしまうので、残念ながらあきらめざるを得ない。
■ まとめ
KATO製 C62 2 とパルス制御式パワーパックの相性の問題について、ひとつの対策を実施する事が出来た。 まだ、改善の余地があるが、充分に楽しめる状態であると判断している。 そして、重連問題に関する知見をさらに深める事が出来た。
![]()