
HOME >> 鉄道模型実験室 > TOMIX 9600形の動力ユニット
鉄道模型実験室 TOMIX 9600形の動力ユニット
.
■ いきさつ
TOMIX の9600形蒸気機関車(品番:2050 1999年発売)について、動力特性の測定と分解調査を実施してきた。 ⇒ 9600形蒸気機関車 29608 この問題の多かったモデルについて、複眼思想で見ることによって、模型としての特質を少しでも理解出来るようになるのではないかと考え、いろいろ触って見ることにした。 例えばトラクションタイヤの有り無しでの特性の違いや、直径違いによる影響などを調べてみようと考えたのである。
■ モータのノイズ
今回の調査は、各部の損失トルクをモータの電流値から推定する狙いがあったため、まず不必要な前照灯を取り外した状態で実験することにした。 そして、何時ものように、自動測定システムを使用して速度特性を調べようとした。 ところが試運転中にエラーが出てしまうのである。
車速測定ユニットを通過中は、Arduinoが電圧、電流、速度などを計測中である。 この間は黄色の LED を点灯して測定中であることを表示している。 即ち、車速測定ユニットの入口スロットを通過すると点灯し、出口スロットを通過して計算処理が完了すると消灯するのである。
 .
.
しかし、入口スロットを通過していない個所で点灯してしまい、正常な動作をしなくなった場合がたびたび発生したのである。 てっきりArduinoとセンサ回路が故障したと思ってあわててしまった。 気を取り直して、小型ELを走らせて見ると、何と正常に作動するのである。 安心して、曲者の29608号機を見ていると、線路の継ぎ目や、曲線の出入口などで点灯しており、もしや犯人はモータのノイズではないかと疑った。 あるいは、集電部のスパークノイズかも知れない。
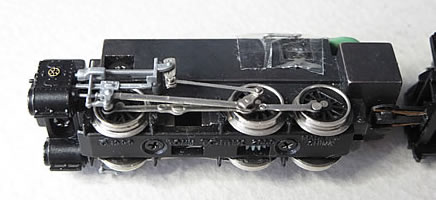
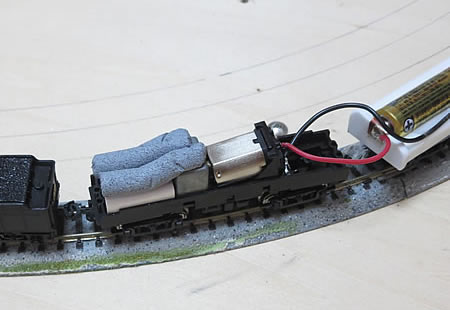
そこで、ジャンク箱を漁ってコンデンサを取り出した。 KATO のチビ凸用動力ユニット(品番:11-103)に使用されていたものである。 F 104.Z と表示されているので、 0.1μF らしい。 さて、このコンデンサを何処に取付けようかと思案したが、モータのあるテンダー車には適切な場所が見つからなかった。 そこで、ボイラ部を取り外し、むき出しとなった左右のフレームにセロテープで貼り付けることにした。
右の写真は動輪を外した時に撮影したものであるが、何とその効果はてきめんに効き、我がArduino 君は正常な点灯動作を示してくれました。 一時的にも疑ってしまってごめんなさい!
 .
.
と言う訳で、このコンデンサを付けた状態で測定することにした。 昔のように携帯ラジオをそばに置いておくと、ガーガーと鳴っていたに違いないと思うが、そのような携帯ラジオは今は無いので確認出来なかった。
■ トラクションタイヤの影響
まず、前照灯無しで、かつコンデンサ付きで速度特性と牽引力特性を測定した。 その後、第2動輪を外し、同様の測定を実施した。 第2動輪はサイドロッドとは連結されていないので、容易に取り外しが可能で、ロッド関係をさわることなく動輪を外す事が出来る。 その状態を右の写真に示す。
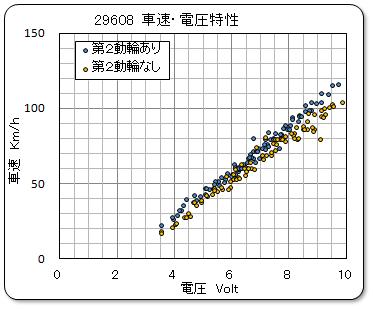
牽引力特性は、今回、電圧が 8Volt の状態だけに絞って測定を実施した。 そして、これらの測定データを重ねて表示したものを下に示す。
● まず、速度特性から見て行こう。 第2動輪、即ちトラクションタイヤの有り/無しの差はあまり無さそうである。 有りの場合にやや速度が高めに出ている。
自分としては電流値に差が出るのではないかと期待していたが、外れてしまった。 分解調査にて報告しているとおり、第2動輪は動輪直径が0.3mm ながら大きくなっている。 これによって第2動輪以外の動輪がスリップしており、そのスリップ抵抗によって電流値がアップするのではないかと考えていたのである。 重連走行での引張やっこの状態と同じ様になるのではないか? と想定していたのである。 スリップ抵抗は極めて小さいと言うことの様です。
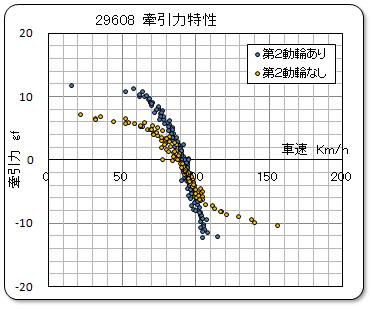
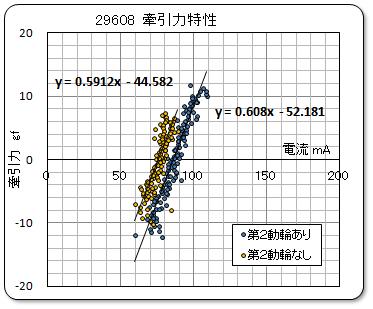
● 次に牽引力特性を見てみよう。 電圧は 8Volt で一定に保持している状態である。 速度特性と違って、この牽引力特性では、トラクションタイヤの有り/無しの差が明確に出ています。 トラクションタイヤを履いていると滑り難くなり、牽引力が増加することをグラフは示しています。 金属同士の接触の場合には、少しずつ滑りが始まっているが、ゴムの場合には直線的に推移し、あるポイントから急激に滑り始めるようである。
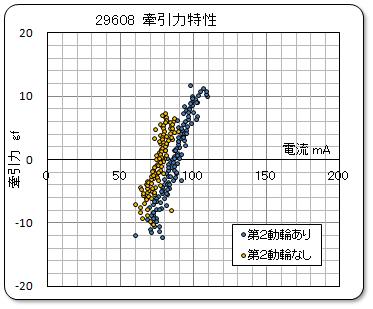
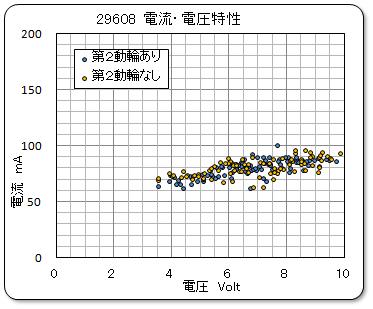
電流値について、速度特性では有り/無しの差が無いようであったが、この牽引力特性では 10mA 程度の差が出ている。 バラツキの範囲内なのか、あるいは何かの要因が隠れているのか判定が付かない。
牽引特性のパターンより、ウォームギヤに掛る力が逆転する遷移点は、7〜8グラム程度はありそうなので、駆動機構の摩擦抵抗が大きいと思われる。 そこで、モータ単品の消費電流を測定してみることにした。
■ モータ単体の特性
モータ単体での電流値を知りたくて、モータが搭載されているテンダー車だけで測定することにした。 本来なら、モータの端子に電極を結び、その時の電流と電圧を測定すれば良いのであるが、この9600形の場合はテンダー車にモータが搭載されている構造なので、走行させながら測定してみることにした。
理由は自動測定システムを使って測定し、上記のデータと同じ方法で測定しようとしたものである。 車輪と線路との接触抵抗は、プラスとマイナスがショートする訳ではないので電流値が増減しないはずであり、接触抵抗による電圧降下も、電流・電圧特性の電圧軸を少し右に移動するだけなので、データの影響は少ないと判断した。 そして、線路に供給する電力はテンダー車のモータにだけ供給し、走行用車両は別の電源、即ち乾電池で動く動力車両で走行させようとするものである。
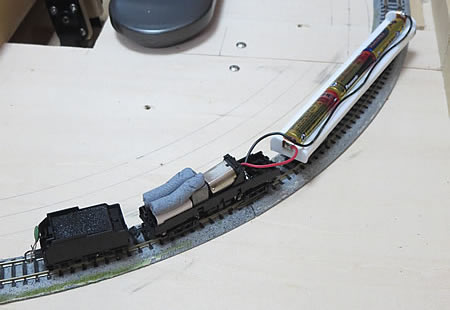


その状態を上の写真に示す。 動力車は鉄コレ動力を使用し、単4の乾電池3本を搭載した車両を作って電力を供給するようにしている。 テスト走行に於いて、やはりモータのノイズによるエラーが発生したので、上の写真のようにコンデンサーを搭載した。 また、テンダー車の走行抵抗が意外に大きく、鉄コレ動力では滑り気味だったので水草の重りを動力台車の上側に貼り付けた。
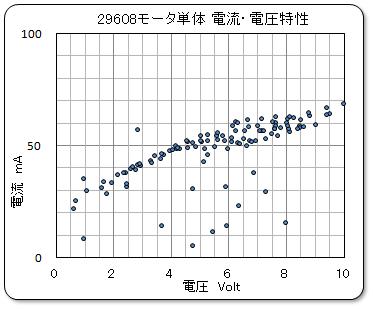
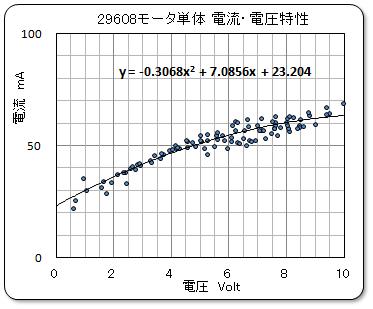
自動測定システムを使って測定した結果を下に示す。 最初の30個のデータに於いて、データのバラツキが多かったので、自走状態での測定はメリットが無いと判断した。 その後の測定は、動力台車による走行は止めにして、テンダー車を停止させ、紙片を使って車速測定ユニットの入力と出口をかざして、通過信号を偽造することで、測定を実施した。 これによってデータのバラツキは少なくなった。 自走時と疑似信号時のデータを含めて下の左のグラフに示す。 この中で、明らかにデータ不良と思われる点をネグレクトしたものを、右のグラフに示す。 6Volt 付近で何か特徴のある現象が発生し、それ以後はカーブが寝て来ている。 共振点などの現象なのだろうか。
このデータを車両状態のデータと重ねて見よう。 とは言っても重ねることが出来るのは、速度特性の電流・電圧のグラフだけである。 そのグラフを下の左に示す。 そして、直線近似させた近似曲線も表示してみた。
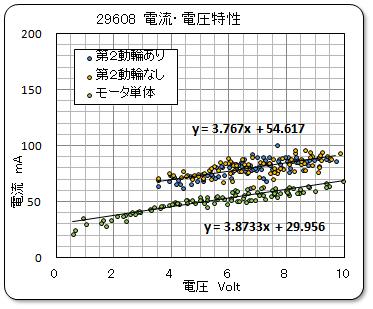
第2動輪ありの状態は、モータ単体の時の消費電流と比べておよそ20〜30mA も増加している。 近似直線の傾きは殆んど同じなので、二つの特性は平行移動していると見ることができ、その移動量は 24mA であると言える。 即ち、減速機構や、動輪と従輪の走行抵抗は 24mA 分の抵抗値となる。 そこで、牽引力特性のグラフより、牽引力-電流の勾配を求めると 0.6 gf/mA となるので、24mA 分の抵抗値は 14.4 gf の抵抗となるものと推定出来る。 なんと、自分自身を走らす為に、牽引力換算で約15グラムの力を使っていることになる。
モータのトルクに換算する場合は、動輪直径と減速ギヤ比を使って換算出来る。 動輪直径 D は、D = 8.5mm 、ギヤ比 i は、i = 30.0 であるから、15×D/2÷i = 2.1 gf・mm となる。 モータの出力軸は、これだけのトルクを発揮しているのに、この機関車の内部摩擦によって自分自身を走らせるの使ってしまい、牽引力はゼロの状態で走行している事になる。 これは、機関車として「効率がゼロ」の状態なのである。
なお、モータ自身を回転させるために、およそ50mA の電流を使っているが、これを 0.6 gf/mA が適応出来るとするならば、モータ自身を回転させるために、伝達系の損失よりも、もっと大きな損失(およそ2倍)が発生している事になる。 これは、回転子に鉄芯を使用しているためと考えているが、この損失を低減したのがコアレスモータであると認識している。 ただ、電力の損失を減らしても、必要なトルクが発揮出来なければ意味が無いので、この辺がコアレスモータの難しいところなのだろうか。
また、当初期待していた乾電池による自走動力ユニットは失敗に終わったが、何かの使い道が有りそうである。 そして、テンダー車の走行抵抗が気になったので、この値を測定してみることにした。
■ テンダー車の走行抵抗
動力を持たないトレーラ車の走行抵抗を測定する方法はまだ確立していないが、何時ものように、傾斜させて走り出す傾斜角と車両重量より計算することにする。 幸いに立派な傾斜台があるので、これを用いることにした。 下左の写真が測定状態である。 傾斜を測る垂直の物差しと秤が写っている。


テンダー車は 15.0 グラムであったが、傾斜台を傾けても走りだす事は無かった。 そこで、重り車両の助けを借りて押し出すことにした。 重り車両の重量は 30.1 グラムで走行抵抗は 0.3 グラムである。 測定点のスパンは 900mm あり、高低差が 75〜95mm の状態で転がり始め、65mm の状態では、車両を軽くトンと押すと下まで転がり落ちる状態であった。 走行中の摩擦トルクはこちらの値を採用するようにしている。 動いている時よりも、動き出しの摩擦抵抗の方が大きいことはよく知られている事である。
即ち、走行抵抗は、( 15.0 + 30.1)×65/900 - 0.3 ≒ 3.0 グラムと計算された。
もっと大きい様な気がしていたが、思ったより小さかった。 また、ウォームギヤに掛る力が逆転する遷移点を牽引特性のパターンより推定すると、7〜8グラム程度と踏んでいる。 この遷移点は、ウォームホイールから動輪までの摩擦抵抗、および従輪やテンダー車輪などのトレーラ車輪の摩擦抵抗が影響するのである。 即ち、7〜8グラムと3グラムの差の4〜5グラムは、動輪やロッド類の摩擦抵抗と言うことになる。
また、モータ出力軸と遷移点の差は、ウォーク軸の摩擦抵抗と考えると、牽引力換算では、14.4 - 8 ≒ 6 グラムとなり、ウォーム軸上では、 6×D/2÷i = 0.85 gf・mm となる。 値としては小さい様に見えるが、この動力車が発揮する牽引力と同じぐらいのモータ動力が、ウォーム軸上で摩擦として消えているのである。
そこで、動輪やロッド類の摩擦抵抗を調べたくなるが、この走行抵抗の測定方法にはあまり自信が無い。 測定するのであれば速度要因を入れたいと思っているのであるが、適切な手法を見いだせないでいる。
■ 結論
この29608号機から得られた知見をまとめてみよう。
- モータのノイズがひどいと判断する。 回りの電子機器に影響を及ぼしている様である。 その対策としてコンデンサ(0.1μF )の追加が有効であった。
- トラクションタイヤを履いている動輪の直径が、他の動輪よりも 0.3mm 大きいが、この直径違いの影響はなさそうであった。 この程度では影響が小さいのか。
- 動輪のトラクションタイヤの影響は、当然ながら粘着力を増加させ、車輪の滑りも防止している。
- トラクションタイヤを履かせる動輪の位置について、第2動輪を選択した理由が分からない。 主な牽引力発生部位をギャで直接駆動させたかったのであろうか。 それなら第3動輪でも良かったのではないかと考えるが、逆の第3動輪にする理由もない気がする。 牽引時の荷重移動を考えると一番後ろの動輪が理にかなっていいると思うのであるが。 また、坂道に入る時は中間の動輪が浮いてしまって駆動力が抜けてしまう恐れがあるが、この防止のため、動輪直径を少し大きくしたとも考えられる。 実車のようにイコライザの無い模型車両では、試行錯誤のテーマではないだろうか。
- 動力伝達機構や従輪の摩擦抵抗によって、モータの消費電流は、20〜30mA 増加している。 今回の測定では、24mA と測定され、牽引力換算では、およそ15グラムの損失と出た。
- その損失の内容を推定すると、
牽引力換算にて
- ウォーム軸 7〜8 グラム
- ギャ伝達系とロッド類 4〜5 グラム
- テンダー車の走行抵抗 3 グラム
- ウォーム軸の摩擦抵抗は、歯面の滑りを伴うためこれ以上の改善は無理かもしれないが、ギャ伝達系とロッド類の摩擦抵抗は、設計的な配慮によってもう少し改善出来るのではないかと思われる。 テンダー車については、C57で改善されているが、9600形では不合格点を付けたいくらいである。
![]()