
HOME >> 鉄道模型実験室 > ブレーキ回路での抵抗値による違い
鉄道模型実験室 ブレーキ回路での抵抗値による違い
■ はじめに
先回、超音波距離センサーを使って発進停止特性の測定について、特に停止時の特性に注目した報告した。 動力車が停止する時にはフライホールの影響でモータが回転され、モータが発電機として作用する。 このモータによる発電作用によって電流は架線、否、鉄道模型では線路に戻すように働くので、逆流する電流によって発電ブレーキが掛る。 先回の実験ではその様子を掴む事ができたので、新しく設けたブレーキ回路の抵抗値を変えて、停止特性を測定してみた。
.
■ 制動走行実験
実際の鉄道車両では、その重い重量と小さな走行抵抗により、惰行運転を上手に活用している。 駅と駅との間の半分以上は、このモータの電気を切ったしまった惰行運転の例もあるそうでさる。 しかしNゲージでは、モータと動輪の間の駆動装置にウォームギヤを常時噛み合わせているため、モータが回れば走り、モータの回転が止まると車両はピタリと停止してしまうのである。 いわゆる惰行運転が出来ないのである。
しかし、最近のモデルでは、滑らかに走りを実現させるために、モータにフライホイールを装着するようになった。 このため、電気を切っても、フライホイールによってモータは少しではあるが回転を続けるので、あたかも惰行運転の様に走行できるのである。
一方、モータは駆動モータとして作用するでけではなく、発電機としても作用させることができるのである。 この惰行運転の状態で、電気回路を工夫すればモータを発電機として働かせ、回路抵抗によってブレーキ力を制御することが出来るらしい。 知識としては知っているが、実際に模型車両を走らせて実感してみることにした。
◆実験装置と方法
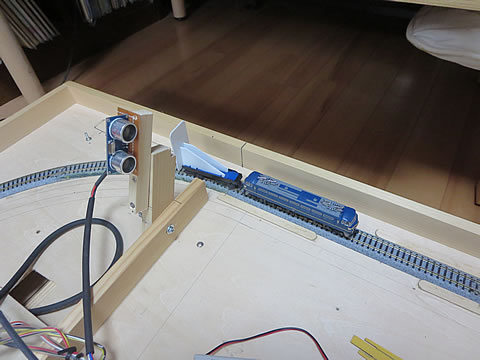
先回報告した装置を使用し、車両は KATO 3047のEF66後期形を使用する。 下の写真に測定回路等を示す。 最初に定常走行の状態を設定するため、簡易速度計にてスケール速度 100Km/h の状態に供給電圧をセットする。 下右の写真。
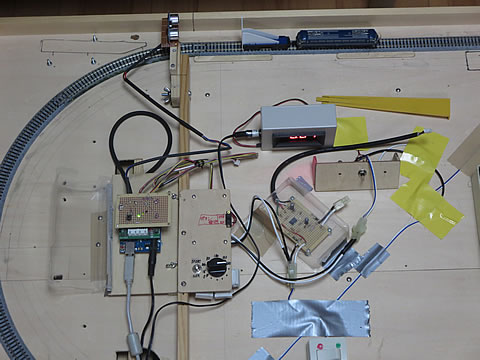

次に反射板車両を連結させて走行し、パソコンを受信状態にセットする。 車両が超音波距離センサーを通過すると、素早くセンサーゲートを下げ、Arduino の測定回路をスタートさせる。 少し走行させてから切替スイッチをブレーキ回路に切り替えて、車両を停止させる。
◆ 実験結果
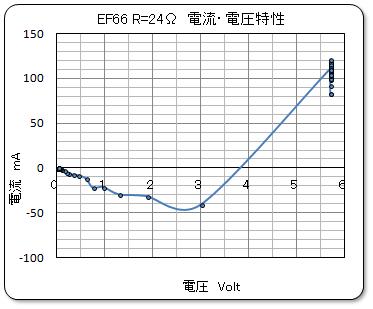
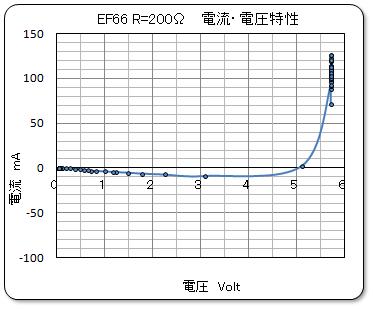
ブレーキ回路は、0Ω、12Ω、24Ω、50Ω、100Ω、150Ω、200Ω、解放の8段階のノッチが選択出来るようになっているので、それぞれの状態で測定した結果を次に示す。
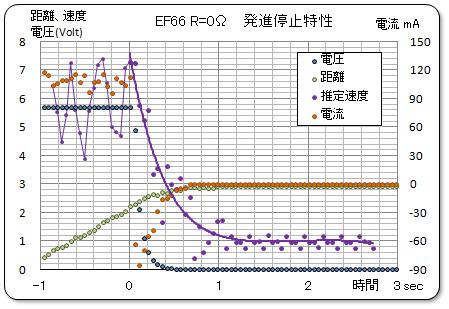
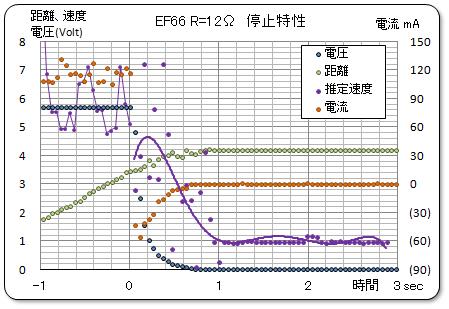
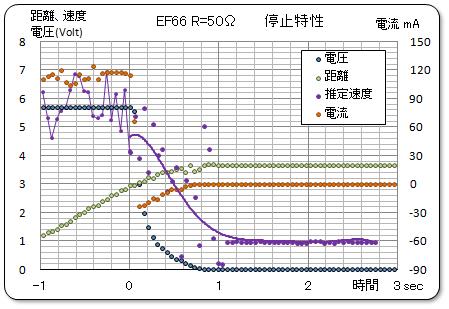
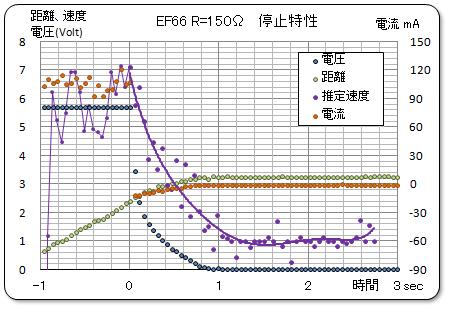
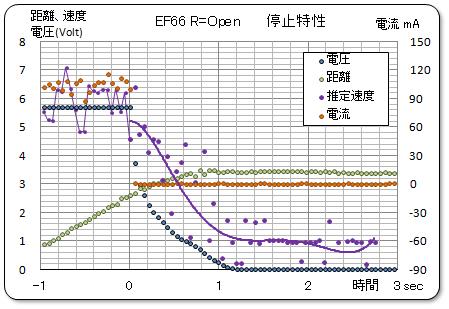
データは、電圧/電流値が変化し始めるひとつ前をスタート時点として整理している。 電圧、電流、距離、推定速度をひとつのグラフに表示させるため、目盛表示を工夫している。 「発進停止特性を測定する」にて説明したが、復習しておこう。
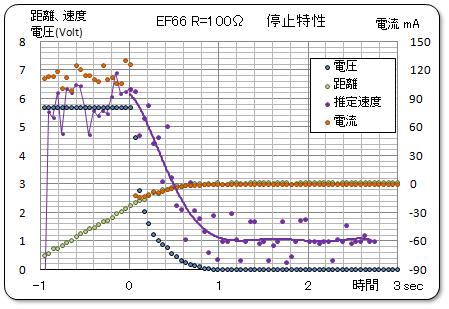
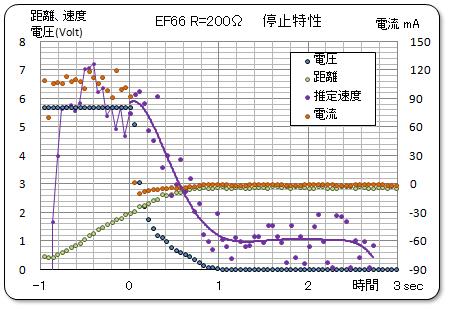
横軸が時間のグラフには、電圧、電流、距離、および速度の4項目を表示している。 4項目を一度に表示させるために、距離と速度のデータについては左の電圧の目盛りを使用して、数値を変更している。 距離データは数値を 1/100 にしてmm で表示する。 速度データは距離データの時間当たりの(msec)変化分から計算し、スケール速度(縮尺1/150)を計算して Km/h の値を 1/20 で表示している。 更にゼロ点を1.0にドリフトさせている。 即ち、1.0 目盛りで 20Km/h を示すことになる。 尚、速度の計算は、「超音波式の距離センサーを使う」にて説明したように、推定速度として
- 距離データはバラツキが大きいので、自身と前後のデータの3個のデータの平均を取る。
- 3点平均の距離データの差分を取って推定速度としてグラフに表示する。
- スタート以降(停止特性の場合にはブレーキ開始以降)の推定速度データを6次の多項式で近似して、その曲線を表示して速度特性とする。
として計算し、表示させている。 即ち、ブレーキ回路切替え前は、スケール速度 100Km/h の状態で走行しているので、左側の目盛り 6.0 の値で一定になるはずであるが、データは上下に変動している。 しかし、平均をみると 6.0 の値で有ることを認めて頂こう。 ブレーキ回路に切替えた後は、急速に速度を低下して、速度がゼロ、即ち、目盛りが 1.0 の状態に収束しているはずである。
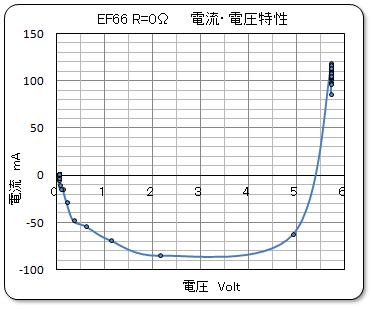
まず、0Ω、即ちショートさせた状態を下に示す。 電流・電圧特性より、電流が大きくマイナスに振れている。 しっかりとブレーキが利いている様である。
次に、12Ωの状態である。 6次の多項式で近似した速度特性はこんなデータも有ると言うことで許していただこう。
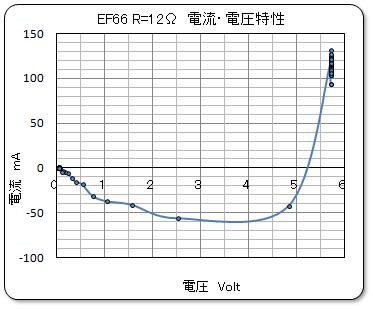
以下同様に、データを示す。
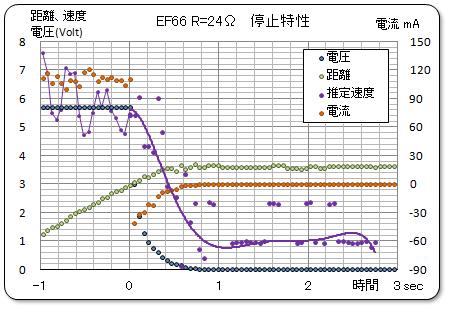
グラフを見てもその変化が良く判らないと思います。 停止位置はブレーキのタイミングよって変化しているが、6次の多項式で近似した速度特性は、使い物にならない様である。やはりもっと精度のよい距離計か速度計が必要の様である。
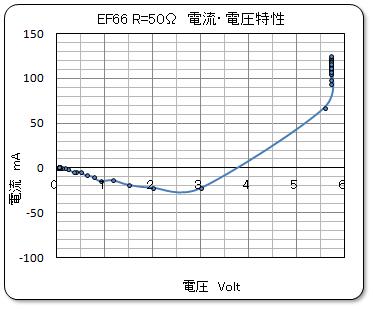
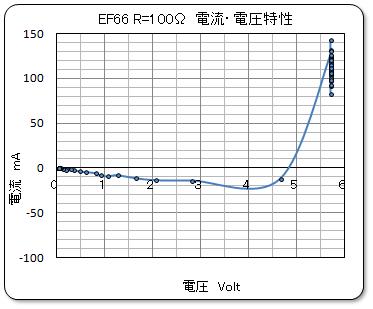
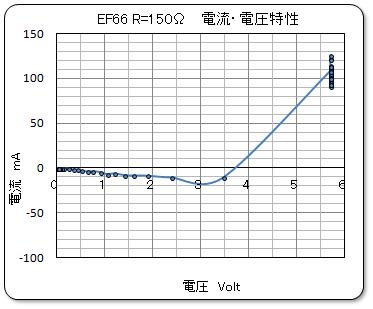
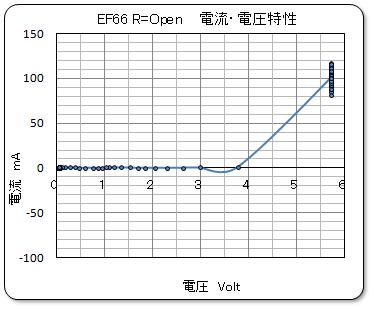
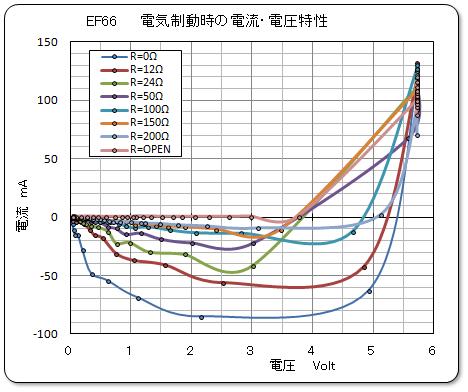
しかし、電流と電圧の特性グラフは綺麗に測定されている。 そこで、このデータをひとつのグラフに表示させてのが、右のグラフである。
最初にダウンする曲線部は信用出来ないので無視すべきであるが、ショート状態の 0Ω から抵抗が増えるに従って、電流値が小さくなって行くのが判る。 抵抗が無限大、即ち回路がオープン状態では、電流は流れようにも回路がつながっていないので電流値はゼロである。 ( 厳密には、車両の前照灯回路や電圧測定用の抵抗が有るので、実際には僅かの電流は流れているものと推察する。)
電線がショートすると過大電流が流れパチパチと火花を飛ばすように、ショートあるいは抵抗が小さければ、大きな電流が流れ、電流によって発生するモータトルクも大きくなるので、ブレーキ力は大きくなるはずである。 考えれば当然であるような気がするが、
ブレーキ力を大きくするには電気回路の抵抗値も大きくする方が良い
と漠然と考えていた小生には、少し戸惑ってしまった。 どうも納得が行かないので、ブレーキを掛けてから止まるまでの距離をデータから読み取ることにした。
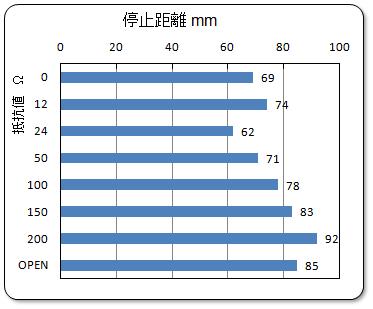
その結果を左のグラフにする。 このグラフより電気抵抗値が多くなったら、制動距離が延びてしまうことが明白である。 即ち、
ブレーキ力を大きくするには電気回路の抵抗値も小さくすること
なのである。 でもこの知見は、今の鉄道模型には応用できない無駄な知見なのである。
なお、左のグラフを見ていて、この車両にもしモータが無かったら、車体の重さと車輪の抵抗によって、どこまで転がるのだろうかと思った。 車体の慣性による惰行走行と、モータの慣性による惰行走行の程度の差が判るような気がするので、何とか工夫して測定してみよう。