
HOME >> 鉄道模型実験室 > 計測装置の脈動状態を観察
鉄道模型実験室 計測装置の脈動状態を観察
■ いきさつ
先回、簡易型オシロスコープを使ってモータの端子電圧の波形を観察した。 目的は、その電圧波形からモータ回転数を計測出来ないか検討するためである。 電源の方式によって、波形が変わることや、電圧よりも電流の波形の方が脈動が大きいことが分かった。 しかし、どう見ても ”回転数情報を含んだ波形” ではなくて ”雑音波形” としか見えないのである。 結果として、自分の技術レベルでは無理で有る事がわかった。
しかし、せっかくオシロと言う道具を手に入れたので、今まで使用していた計測装置の脈動状態を観察しておくことにしよう。
 .
.
■ 計測装置
波形を観察する対象は、動力特性の自動測定装置について、その電圧と電流の値をAeduino に取込む部分である。
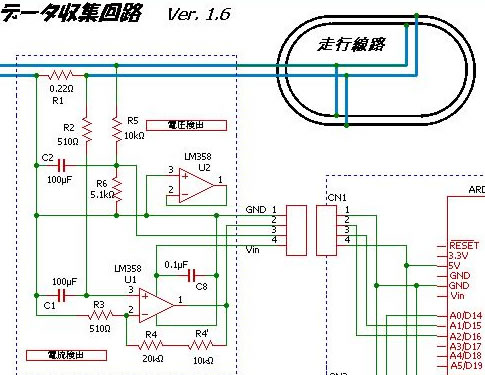
動力特性測定装置は、「システム構想と回路図 (2013.3.4)」で始まる一連のレポートにて報告した装置である。 そして、この装置の最終的な回路図は「回路の修正」に示しているが、電圧と電流を測定する部分を抜き出すと、右の様な回路を構成している。
電圧はArduino のアナログ入力範囲である0〜5ボルトに収まるように分圧回路を構成し、電流は0.22Ωの抵抗の電位差をオペアンプで増幅して入力している。 そして、Arduino でAD変換してデータとして取り込んでいるが、この時の電圧と電流の脈動成分を可能な限り取り去ったデータとなるように工夫した。 アナログ回路では、100μFのコンデンサを使用し、プログラム(スケッチ)上では、多くのデータを収集して平均値を求めている。
しかし、Arduino の入力値ではどれくらいの脈動成分が残っているのかは不明のままであった。 オシロという道具を手に入れたので、この脈動成分を観察し、我がシステムの信頼性を確認することにしたのである。
アナログ回路では、計算の仕方も分からなかったし知識もなかったので、トライ・アンド・カットの「ちからわざ」で、容量の大きなコンデンサを採用した経緯がある。 「電圧・電流測定ユニットの不思議な振動」を参照下さい。
その後のネットで得られた知識より、改めてローパスフィルタとしての特性を計算しておこう。 ここでは、CRローパス・フィルタの計算式を使って計算することにする。 まず、電圧検知の回路では、10KΩの抵抗と100μFのコンデンサを使用しているので、カットオフ周波数 fc = 0.16Hz となる。 電流検知回路では、510Ωの抵抗と100μFのコンデンサを使用しているので、カットオフ周波数 fc = 3.12Hz となる。 この数値を計算して少し驚いた。 0.16Hz と言う事は、周期としは6秒以上である。 これより早い変化は減衰させていくと言うことであるので、検出回路としては少しやり過ぎのような気がする。 ただ電圧は、安定化電源を使ってピタリと一定にしようとしているので、矛盾は無いとも考えられる。 この測定回路では、脈動成分ではなくて直流成分を務めて測定しようとしているので、正解であると判断している。 しかし、この事を念頭において、波形を観察して行こう。
電流回路は、オペアンプの増幅率から抵抗値を決めたので、結果的には、カットオフ周波数が高くなっているが、これももう少し高くしても良かった様である。 でもともかくこの状態で測定してきたので、この状態での波形を観察することにしよう。
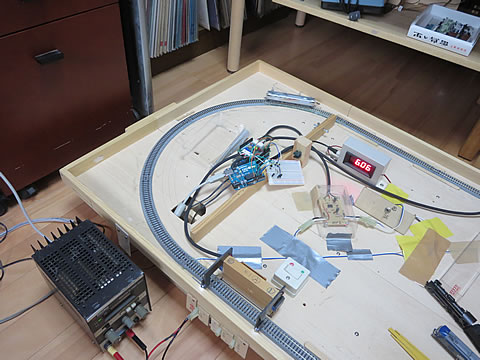
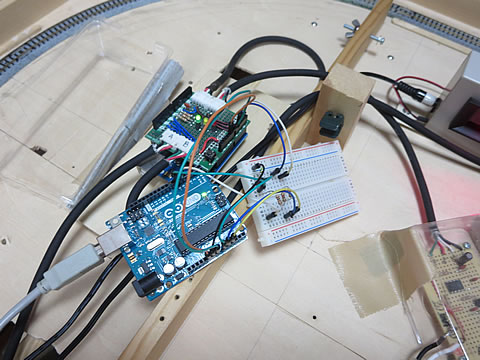
実験状態を上に示す。 二つのArduino の電源は共通使用し、オシロ回路はブレッドボード上に構成している。 電源は安定化電源を使用し、測定波形は、チャンネル1(CH1)で電圧を、チャンネル2(CH2)で電流を表示させることにした。
■ 波形の観察
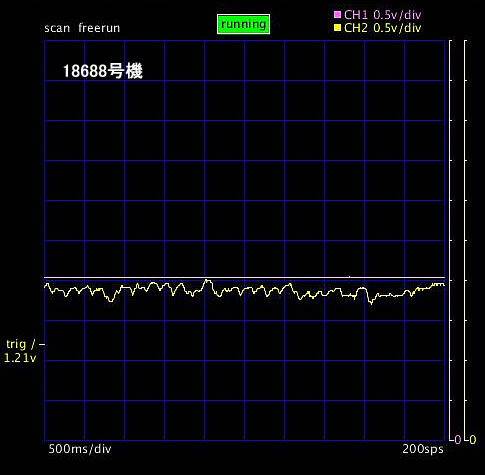
最初に、電気機関車を走らせた。 オシロの設定はいつもの様な値に設定したが、電圧も電流も一直線状態を示していた。 表示ゲインを変えるも、時々ノイズらしき変化はあるが、滑らかな線のままで電流が少し上下に揺れるようであった。 やはり、ローパスフィルタがしっかり効いているようである。 目的としたねらいは充分達成していると判断出来る。
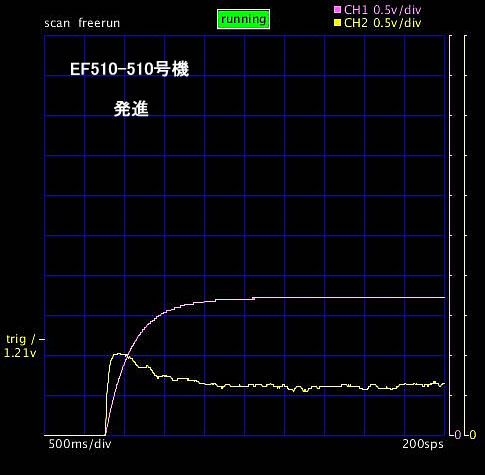
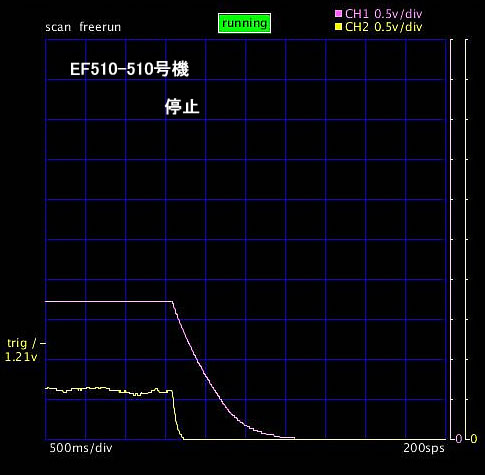
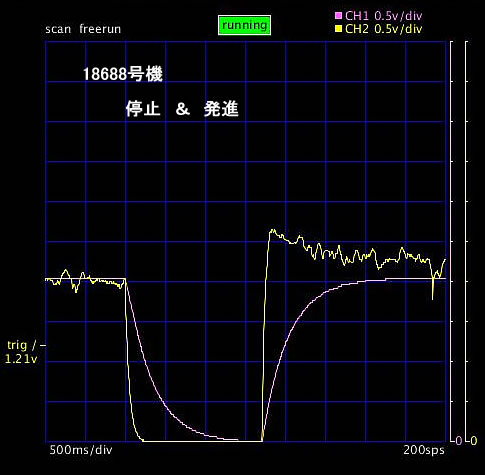
しかし、直線的な波形を見ていても面白くないので、横軸の時間軸を 500ms/div まで落として見た。 しかし、波らしき状態が観察出来たが、見ていてもやはり何の面白味もなかった。 さらに、本当に電圧と電流を表示しているのか疑問に思ったので、車両を停止&発進させてみた。 その時の波形を下に示すが、なんときれいなステップ応答曲線が表示されたのである。 これを見て途端に嬉しくなってきた。 これは、何かに使えると直感したのである。
この横軸の時間軸を 500ms/div まで落とすと、横軸のスイープは自動的に実施しているようで、右から左へとゆっくりと流れていきます。 端から端まで5秒かかっているので、丁度良いタイミングで、スクリーンコピーを実施して編集したものが下の画像です。
この応答曲線は、フライホイールの影響か? とも思ったが、検出回路の時定数の影響も大きく効いていると考えるべきなので、色々な車両を走らせてみた。
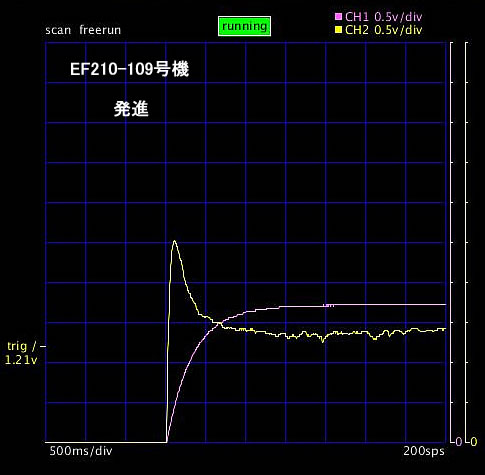
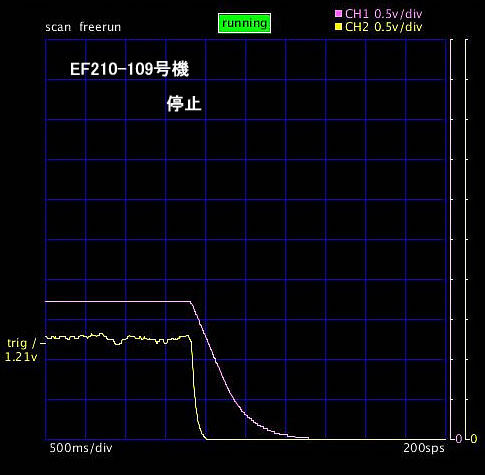
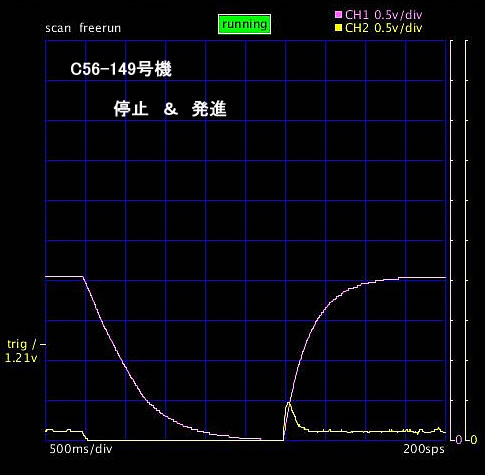
車両によってパターンが変化するので、回路の時定数だけの影響とは言い切れないようである。 今度はSLを走らせてみた。
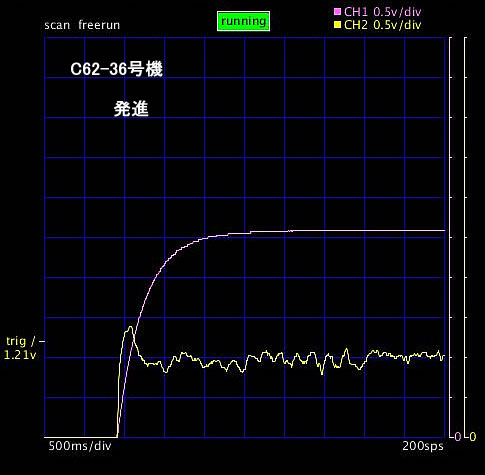
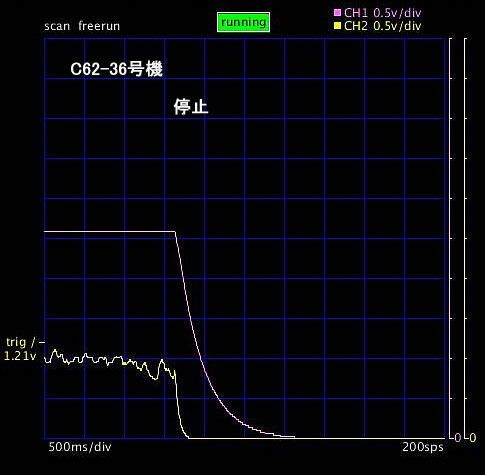
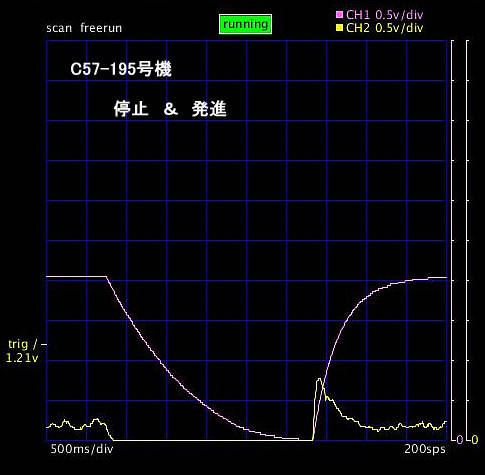
電圧は同じ様なパターンを示しているが、これは測定回路の時定数の影響が大きいからかな? 電流値は、少しずつ異なったパターンを示している。 そして、定常走行時の電流波形には、少し脈動らしき波が見えてきた。 山を数えると、11山/2.5秒であるので、4.4サイクル/秒と計算される。 このサイクルは何を示しているのだろうか?
このC62-36号機の動輪はφ11.4mm である。 このサイクルが動輪の回転数とするならば、1秒間に 158mm 進んでいる事になる。 これは、スケールスピードに換算すると、約85Km/h の速度と計算される。 車両速度や電圧を正確には測定していなかったが、まさに測定状態を表していると言えるので、この脈動は、動輪の回転状態を示していると推察しても間違いなさそうである。
すなわち、蒸気機関車の場合には、ロッド類の動きによる摩擦抵抗の変化がモータトルクの変動となり、この電流波形に表れてくると推定される。 ちなみに、マイクロのD51も走らせて見た。
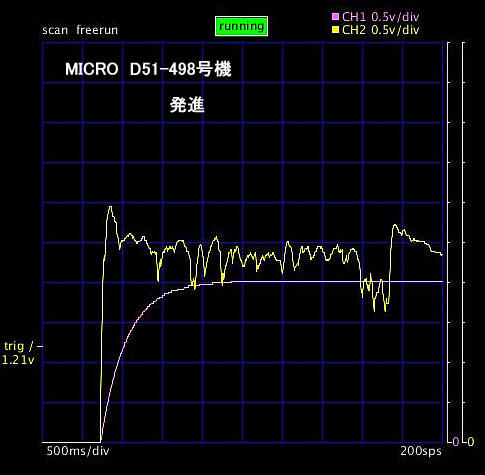
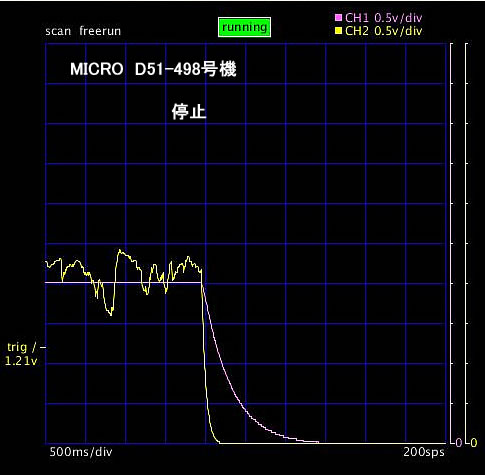
出ましたね。 電流値も大きいが波も大きく、時々大きく乱れています。 比較的乱れの少ない時の定常走行状態の波形を下に示します。 また、マイクロの8620形も比較として並べてみました。
8620形は安定した波形で、動輪に起因すると思われるきれいな波が表れていますが、D51形はランダム波形です。 何故だろうか? メカ機構のガタつきなどの要因により不安定な回転状態を示しているようです。
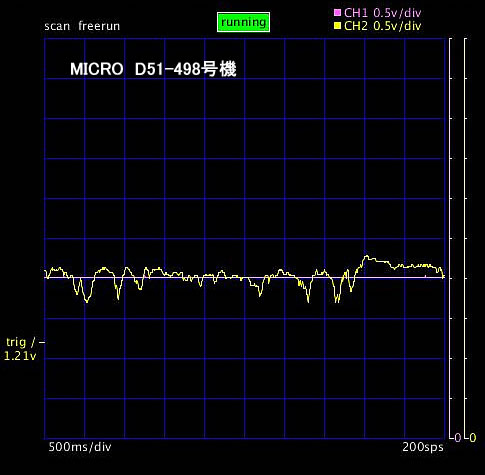
発進と停止を別々に観察していたが、だんだん横着になって来て、停止と発進を続けて観察するようにしました。
最後にコアレスモータの2機種を走らせて見た。 電流値が小さいため波形はうまく観察出来なかった。 ゲインを上げるとデジタル波の様な矩形波となってしまい、測定回路の限界と判断しています。
■ まとめ
今回は、動力特性の自動測定装置について、その電圧と電流の値をAeduino に取込む部分の波形を観察した。 装置を工作していた途中において、入力値の脈動に悩まされたが、その対策結果である100μFコンデンサの効果がしっかりと出ている様子であった。 少し効きすぎる感じもあるが、目的は達している事が確認出来た。
さらに、蒸気機関車などのロッド駆動のある動力車については、ロッド駆動の滑らかさを観察出来たので、これをデータ化できると面白い知見が得られそうである。 また、発進・停止時に於ける電気的特性も、もう少し詳しく観察してみたくなったが、このためには、電気回路の見直しが必要となるので、躊躇しているのである・・・・・・・。 そして動輪の回転、あるいはロッドの動きをパルス化すると、もっと面白そうな現象が掴めるかもしれないと思うようになった。