
鉄道模型実験室 No.182 新測定台のまとめ
新しい測定装置の確認作業も完了したので、補足説明を加味してまとめることにした。 報告が重複する部分はご容赦下さい。
■ 装置の概要
 .
.
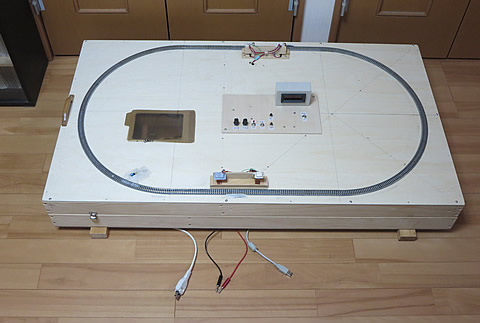
新しい動力特性測定装置は、右の写真のように、横 1100 × 奥行 630 ×高さ 130 mm の箱型です。 (足の高さ 30mm を除く )。
この箱の上面にはTOMIX 製のNゲージ線路、カーブレール C280-45(F)、ストレートレール S280(F)、S158.5(F) を設置しています。 また中央部には操作盤を配置し、測定時の操作をここで行います。 左側には駆動装置の点検窓を設け、スモーク色のプラ板で埃避けとしています。
測定時にはこの線路を右回りの走行させますが、直線部には、走行速度を計測するために二ヶ所の測定ゲートを設けています。 そして、左側曲線路の進入部には、車両の通過センサを設け、昇降駆動のセンサとしています。
また、装置の底面からは3種類のコートを取り出しています。 100ボルトの家庭用電源に接続する電源線、模型車両を走らせる給電線(赤と黒のプラグ)、測定データを送信するためのUSB信号線です。
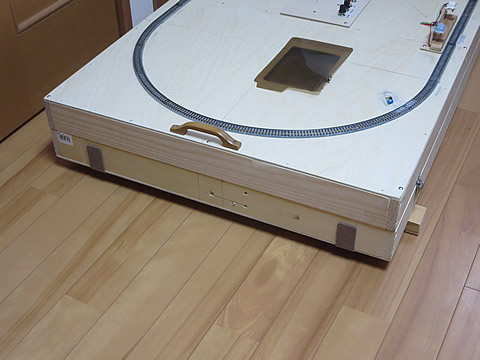
箱型装置の左側面には、フェルトを貼り付けており、装置を立て替えておく場合の床への傷つけ防止を図っています。 下左の写真。 さらに箱を持ち上げるための取っ手も取り付けました。
また前後の側面の左端には、金具を取り付けて措置の開閉を固定しています。

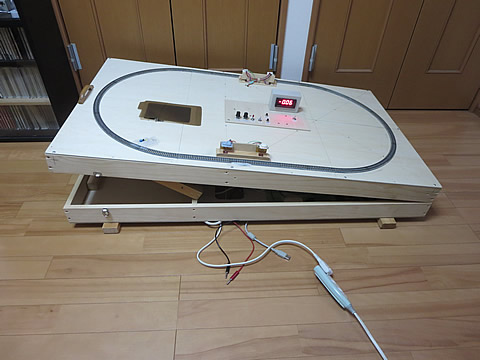
昇降駆動装置を作動させ、上側の傾斜台を傾斜させた状態を下に示す。 最大傾斜は、昇降装置のリンク構成の限界より sinθ = 0.1215 までです。 これは、角度で7.0度、122パーミルの勾配となります。
こんな急勾配でも登っていく動力車は無いだろうと安心していましたが、これが大失敗でした。 楽々の動力が有りましたな。 今までの測定条件を吟味していたら、もっと限界値を大きくして板のですが、もう後の祭りのミスなのです。 重り車両をもっと重くして対応するしかありません。

装置の収納は、装置を立てかけた状態で部屋の隅に置いておきます。 出っ張りが少なくなっていますが、測定ゲートには保護カバーが必要となるかも知れません。


装置の足の裏にもフェルト貼っており、床の傷つけ防衛を図っています。 また、コード類は底の穴に押し込めています。 家庭用掃除機のように自動巻き取り機構があるといいのですが・・・・・。
■ 昇降駆動装置
装置の各機能部分について説明して行きます。 まず、傾斜台を昇降させる駆動装置から説明します。 この機構は完璧な装置とは言い難いので、安全のために点検用の穴を設けています。 そして、窓の淵には応急処置として実施した角度検出機構用リンクの固定部を設けています。 下の写真に見える蝶ナットで固定している部分です。 この機構によって、傾斜台を大きく開くことが出来なくなっています。


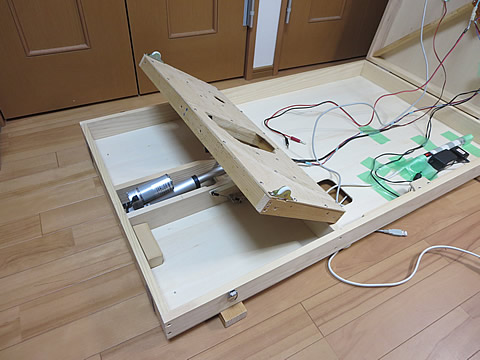
傾斜台を上げた状態を覗いて見ましょう。 電動シリンダによって昇降駆動リンク機構は駆動されています。 また、その右側には角度検出機構のリンクも見えます。


上面の点検窓から覗いた状態を下左に示します。 そして、角度検出リンク機構の蝶ナットを外し、リンクの一端を外した状態を下右に示します。


こうすると、上面の傾斜台は下の写真のように大きく開くことが出来ます。 内部にセットしたユニットの点検や取付け取り外しの作業が出来ます。

傾斜台を昇降させるフラッパ部分を右の写真に示します。
 .
.
■ 電気系の構成
次に電気系の構成を説明します。
電気系は、傾斜台の昇降駆動を制御する系統と、動力車の特性を測定する二つの系統があります。 そして、これらの系統は、二の Arduino UNO によってそれぞれ独立して制御されています。
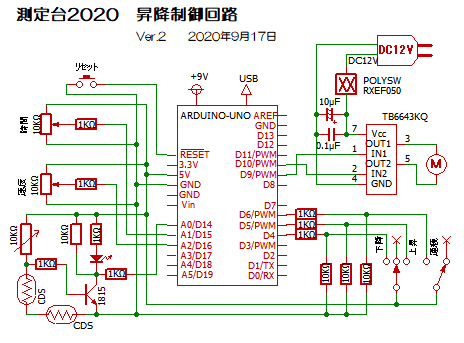
まず、昇降制御回路を右に示します。 操作盤上のスイッチなどの操作機器と通過センサからの信号により、電動シリンダの動きを制御する構成です。 電動シンダは前後に動く必要がありますのでその方向の制御と、動く時間や速度も制御する必要があります。 このためには、電動シリンダのモータをPWM制御し、モータドライバによって駆動します。 このPWM制御は、Arduino の制御周波数をそのまま採用していますので、モータの作動音がしっかりと聞こえています。 これは、逆に作動していることが確認出来るので有用である思っています。
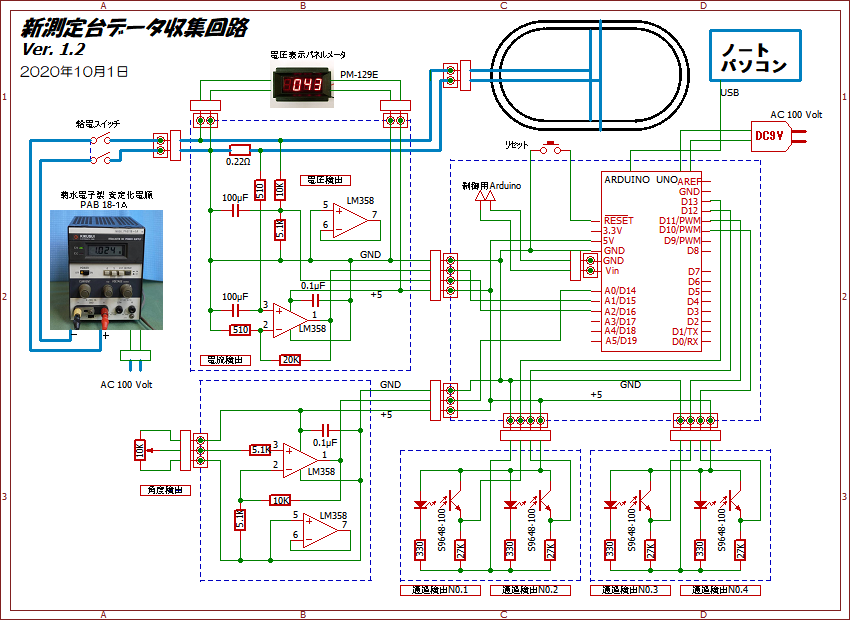
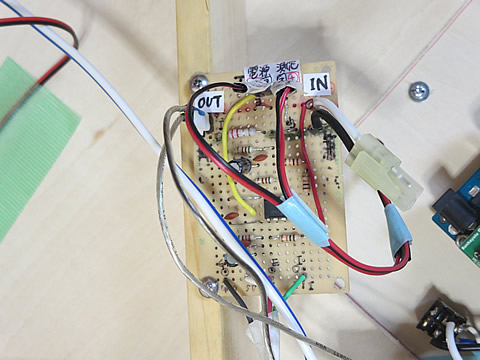
次に、測定系の回路を下に示します。 レールに給電する電力の電圧と電流を測定するユニットと、測定ゲートを通過する瞬間を検知して、ゲートのINとOUTの時間を計測するユニットと、傾斜角を測定するユニット、およびArduino に集約するシールドから構成されています。
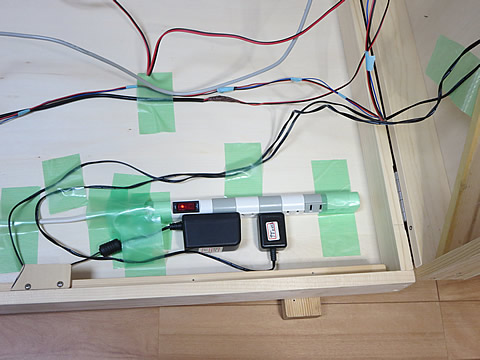
また、電力供給は、鉄道模型には直流15Vと1Aまで流せる安定化電源を使用しますので、これ専用の配線となっています。 また、電動シリンダーは 12 ボルト仕様なので、専用のACアダプターから供給します。 そして、ふたつのArduino には9ボルトのACアダプタから供給しますが、昇降制御系Arduino には、制御系Arduinoから電力を供給してもるうように、それぞれの供給電源端子を接続しました。
100ボルト線は卓上コンセントにACアダプタを装着して片隅に配置しています。 下左の写真。
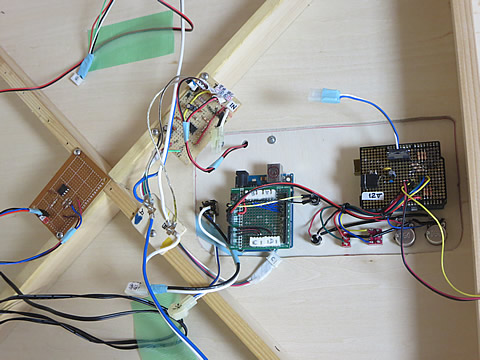
システムの主なユニットは下右の写真のように、上側の傾斜台裏側に取付けており、各ユニット間はいろいろな種類のコネクタで接続しています。 従来から使用していた物を使用したので、あえてバラバラの種類となっていますが、誤接続防止にもなっています。
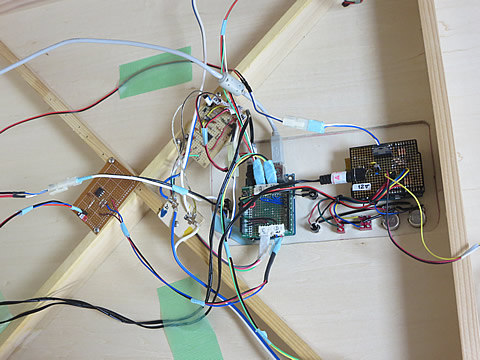
二つの Arduinoは、下左の写真のように操作盤の裏側に設置しており、シールドを使って周りの機器との配線を実施しています。 まず、昇降駆動制御系の Arduinoを下右に示します。
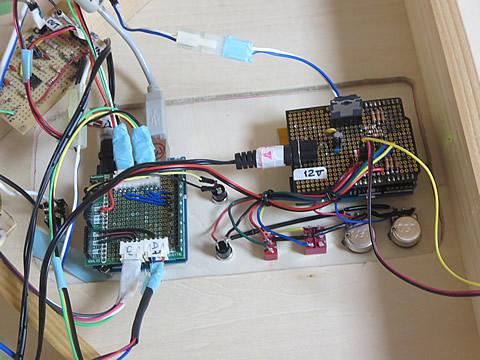
測定系 Arduinoは下左に示します。 下右は電圧・電流測定ユニットです。 安定化電源から給電された電気を、ここからレールへ給電する一方で、電圧と電流を計測し、その出力情報はArduino のアナログ端子へ入力させます。 また、操作盤に設けられた電圧計パネルへの電力と電圧値もここから供給しています。

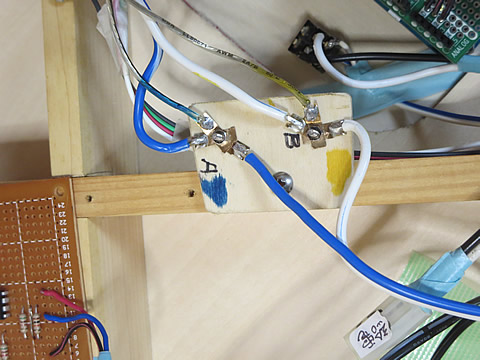
レールへの給電は、下左に示す部分で手前側と奥側の直線レール部分に分配されています。 極性を間違えないように青と白の配線で区別しています。
上右の写真は、傾斜角を測定する可変抵抗の電圧をオペアンプで増幅してArduino に入力させる角度測定ユニットです。
 .
.
■ 操作盤の構成
測定装置の上面には操作盤を設置しています。 ここでは、レールへの給電のON/OFF スイッチと給電電圧を表示するパネルを右の方に配置しています。
左側には、測定台を昇降させる電動シリンダの駆動速度と駆動時間を調整するボリュームと、上昇、下降、停止の選択スイッチ、そして、個別作動か連続作動かの選択スイッチを設けています。 そして中央部には二つのArduinoをそれぞれリセットっせるリセットボタンを配置しました。
■ 測定系のArduinoのシールド
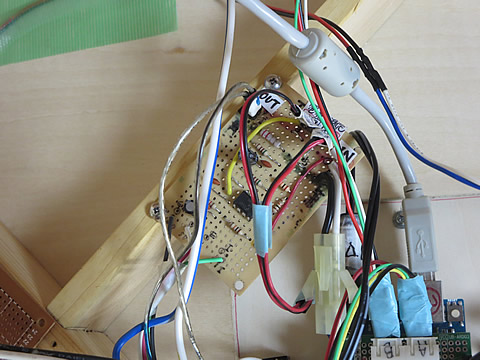
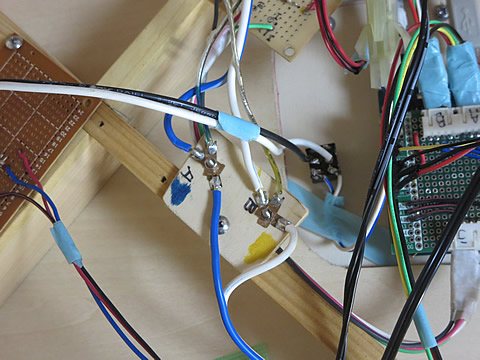
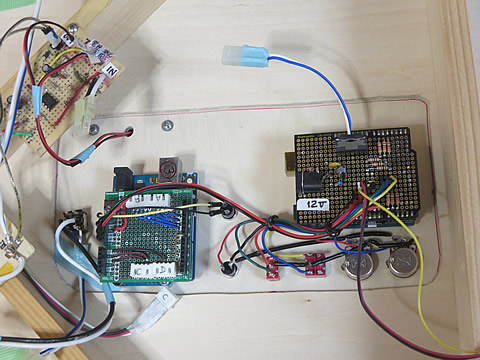
この操作盤の裏側について、ユニット間の配線を外した状態を下に示す。
まず、測定系のArduinoのシールドは、各要素のユニットにて信号処理を実施しているため、それらの信号入力を接続するだけです。 しかし、ユニット毎に電力の供給が必要なことと、それぞれを専用コネクタで接続させるための専用シールドを作っています。 専用のコネクタの取付けと配線だけの簡単なシールドなので、説明省略します。 その構成は、「測定系の制御装置」(2020/9/27)をご覧ください。
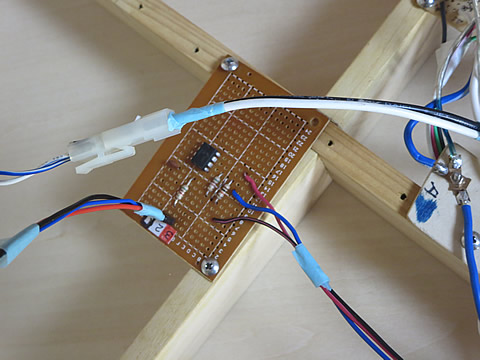
■ 昇降制御系Arduinoのシールド
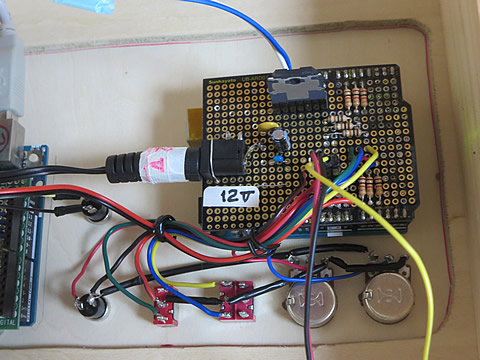
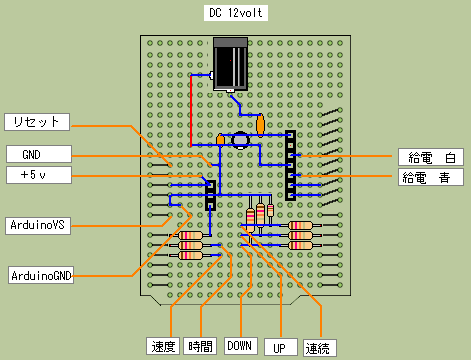
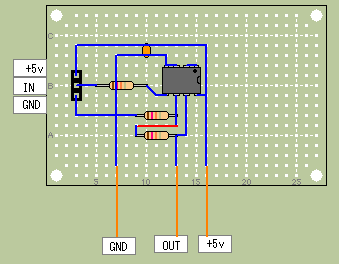
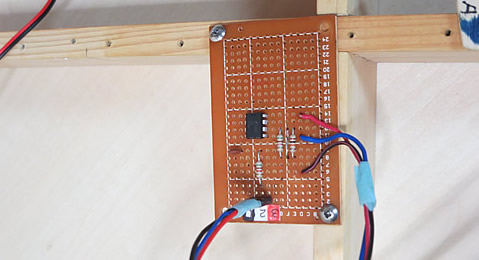
昇降制御系Arduino のシールドは、回路構成を新しく作成する必要があったので、先回まで使用したシールドを改造して使用しました。 詳細は「昇降駆動装置の制御装置」(2020/9/21)にて、工作内容を記載していますのでこちらを参照ください。 実体配線図を下左に追加しました。 シールド板は再利用していますのでランド面が汚れています。 また、電動シリンダ用の電源として12ボルトを使用しますが、そのコネクタを針金で括って固定しています。
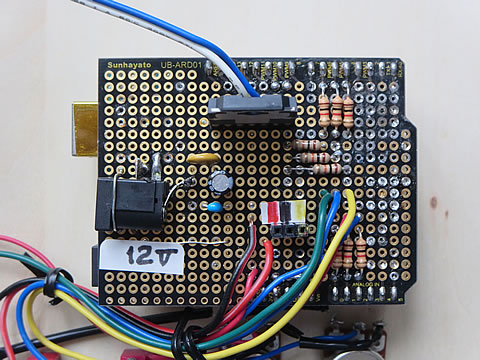
中央の小さいピンホルダはセンサとの接続用であり、大きいピンホルダはモータドライバ用のソケットとして使用しています。 通常はこのようなICは基板に直接ハンダ付けるようですが、ドライバが破損した時などの交換が必要になった時のために、ソケット方式としています。
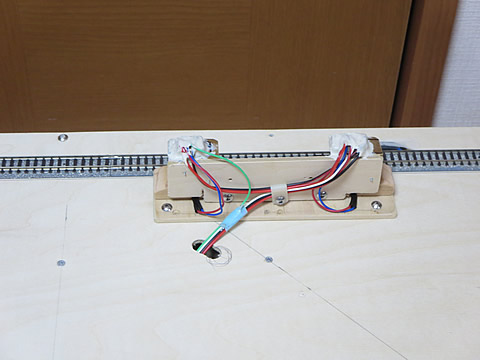
この昇降制御系のセンサは、動力車が一周する度に昇降台を作動させる目的で、車両の通過センサを設置しています。
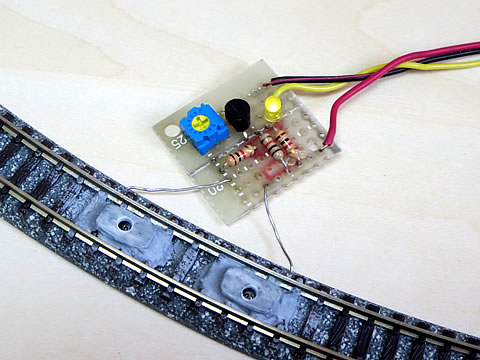
そのセンサはダブルセンサ方式を採用し、測定環境に応じて応答具合を調整できるように線路脇にユニットを配置していますが、固定を兼ねてマスキングテープで周りを固定しています。
 .
.
■ 電圧・電流測定ユニット
次に、電圧・電流測定ユニットについて説明します。 動力車を走らせる給電のための電源は、右に示す愛用の安定化電源を使用しています。
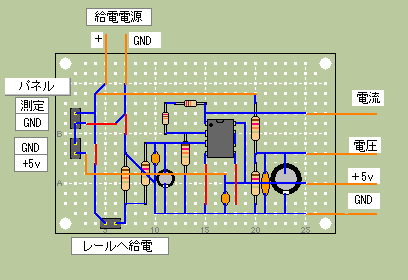
この電源からレールへ給電する間に、電圧・電流測定ユニットを設けて、給電される電圧と電流を計測し、その情報を Arduino へのアナログ入力としています。 その実体配線図を上に示す。 操作盤上の電圧計パネルの電源と測定値はここから供給しています。
レールへの給電のための分電盤(?)を右に示します。
■ 速度計測用ユニット
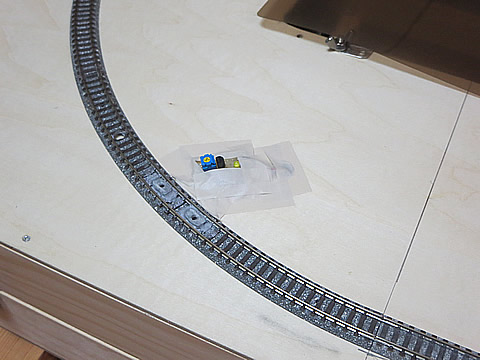
走行する車両の速度を計測する測定ゲートの詳細については、「測定ゲートの工作」(2020/9/30)を参照ください。 カバーはまだ工作していません。
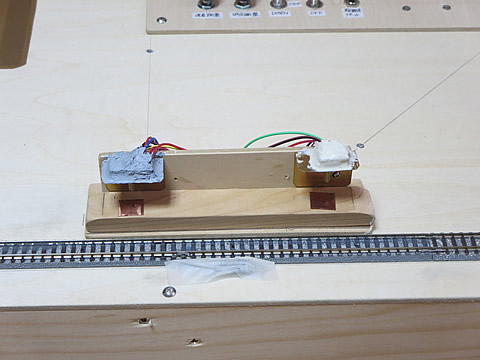
この測定ゲートを横切るビームカッターは、当初は軽い車両の1台だけでしたが、重り車両を連結すると、この軽いビームカッター車は下り坂で重り車両に押されて座屈して脱線してしまう事態が多発してしまいました。 このため、重い車両には直接ビームカッタを取り付けています。 下左の写真。


 .
.
この重り車両は、動力車の牽引力に応じて、上右の写真の様に何種類もの車両を用意しています。
■ 角度測定ユニット
傾斜台の傾斜角はリンクを使って可変抵抗の電圧値として取り出し、 Arduino の入力させています。 この角度測定ユニットも再利用ユニットですが、可変抵抗の使用する角度範囲が違ってきたので、オペアンプの増幅率を変えています。
下左はこのユニットの写真を、下右には、角度情報を取り出す可変ボリュームの取付け状態を示します。

■ ソフト関係
Arduino 用のプログラムであるスケッチについては、測定系は、「測定系のスケッチ」(2020/10/4)を、昇降駆動系は、「昇降駆動装置の制御装置」(2020/9/21)を参照ください。
また、Arduino から送信されてきた測定データの処理は、Excelを使って処理しています。 送信されたデータはシリアル通信によって送信されてきますが、これをノートパソコンのExcel にて受信処理されて、グラフ上に表示しています。 するとデータは、リアルタイムモニタのごとく表示されます。 この時のマクロ処理については、「スケッチとExcelファイルの設定」(2020/10/5)を参照ください。
***********************************************************************
以上で、今回の新測定台の製作プロジェクトは完了と致します。
2020/10/21 作成