
HOME >> 鉄道模型実験室 > モータドライバとPWM制御 ROHM 製 BD6231
鉄道模型実験室 No.191 モータドライバとPWM制御 ROHM 製 BD6231
コアレスモータをPWM制御で駆動すると、デューティ比と車速の関係が なぜ非線形になるのか と言う疑問に対し、こだわり屋の実験室長はショットキーバリヤーダイオードを持ち出して実験した。 その結果、モータドライバの種類によって状況が異なることが分かったので、今回はROHM 製のフルブリッジドライバ BD6231についてさらに詳しく観察した。
.
■ ROHM製のフルブリッジドライバ BD6231
今回もデータシートの説明図から無断コピーして、ドライバの内容を説明しよう。 この石のPWM制御方法は幾つかの方法がある。
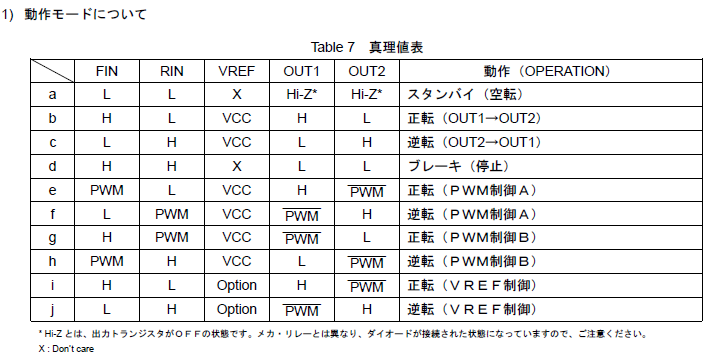
まず、PWM信号を入力ポートのどちらか一方に入力し、他方のポートを HIGH または LOW にして2種類ある制御モードを指定する。 PWM制御のAとBである。 さらに、VREFポートに参考電圧を印加すると、それに応じてPWM制御された出力を出してくれるVREF制御モードがある。 この方法は、「モータドライバBD6231を使って簡易コントローラを作る」(2020/3/19)で応用しているので参照してください。
ただし、PWM と記された部分には否定記号とおぼしきオーバーラインが引かれており、反対になると言うことらしいが、その内容はどうなるのだろうか?
◆ 制御モードのAとB
先回工作したマイコン式の運転操作台を作ろうでは、この石を使って 正転(PWM制御A) で制御している。 そこで、このモードでの制御内容を見てみよう。
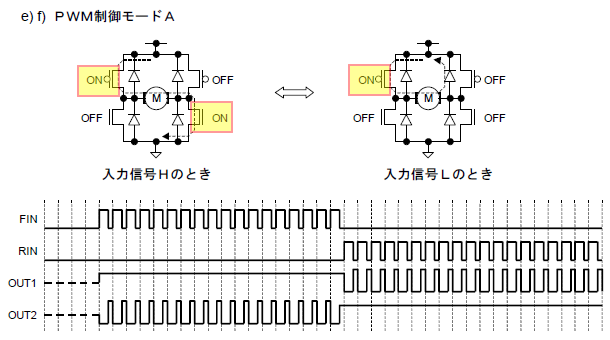
この制御では、ハイサイドのスイッチは常にONさせておいて、ローサイドのスイッチをON/OFFさせてPWM制御を実施している。 メータアウト制御だ。 そして、OFFの時のモータ下流側は供給側とダイオードを通して連通するので、電流は上流側に戻すことになる。 このため、モータ下流の電圧は供給側とほぼ同等となるため、モータの差圧はゼロとなるのだ。
もう一つの正転(PWM制御B) の制御モードでは、これとは違った方法である。
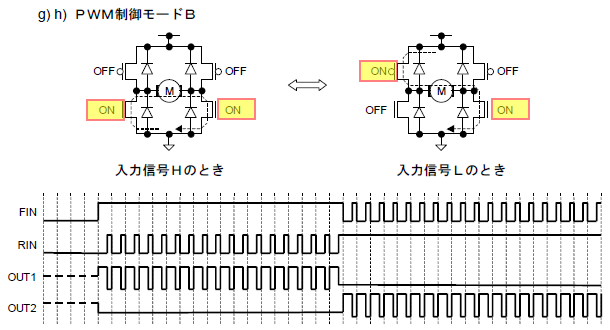
こちらは、ローサイドスイッチのを常にONさせておき、ハイサイドのスイッチをON/OFFさせてPWM制御を実施している。 メータイン制御だ。 さらに、ハイサイドのスイッチがOFFの時は、ローサイドのもう一方のスイッチをONさせている。 これは、TB6612と同じ制御パターンとなるのだ。
■ 制御Aでの挙動
KATOのチビ凸用動力ユニット(品番:11-109)を搭載したBトレのEF65を走らせながらその走行速度を測定しつつ、オシロで波形を観察しました。 モータドライバ部の配線の様子を下に示す。
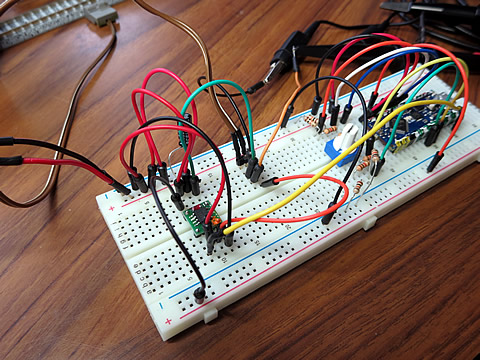
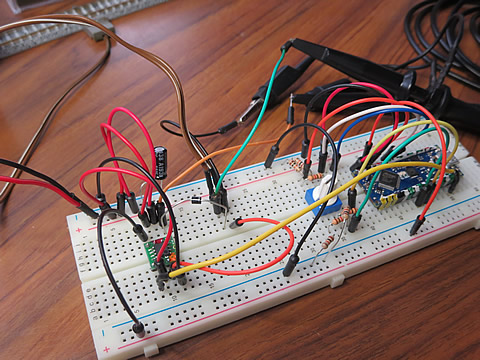
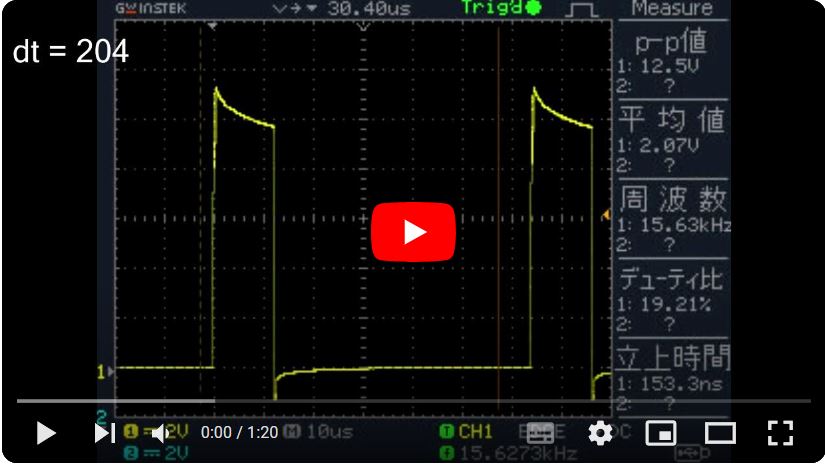
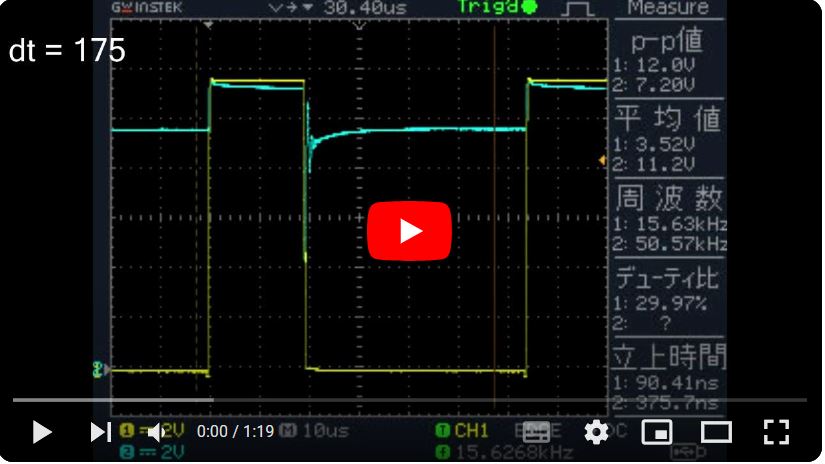
上左の写真はダイオードがない場合で、上右の写真はダイオードを挿入した状態である。 実験方法は、先回と同じである。 下に紹介する動画は、オシロの画面をハードコピーし、その波形画像を動画として取り込み、同じ物を5回繰り返す様に編集している。
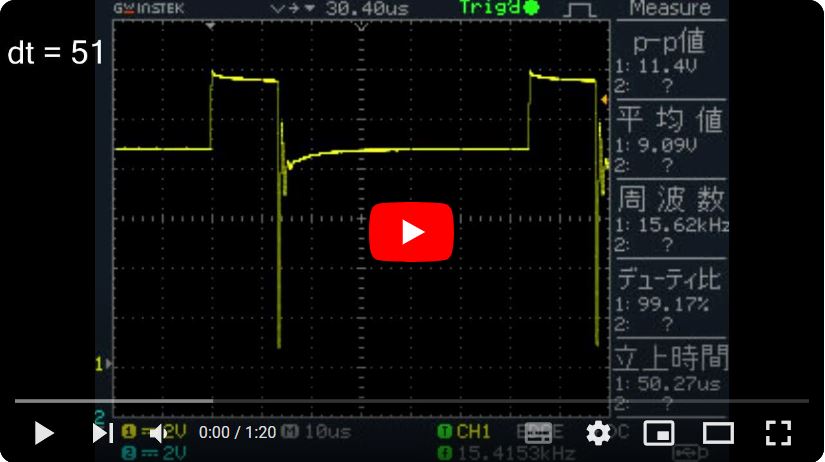
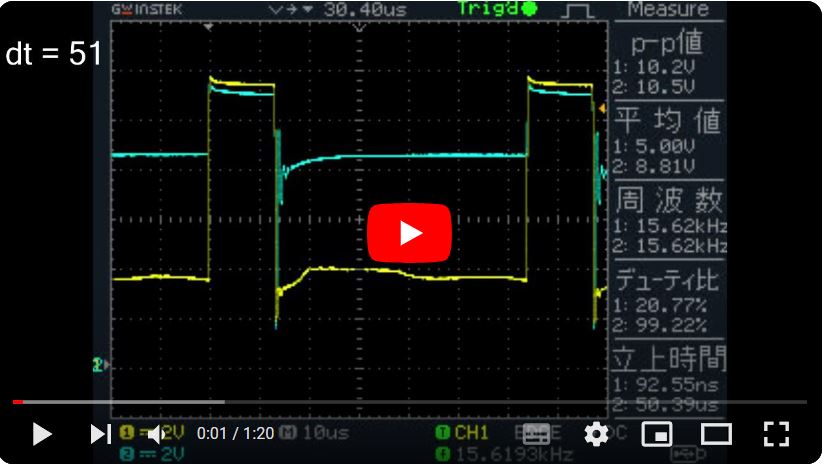
ショットキーバリアダイオード無の場合 ショットキーバリアダイオード有りの場合
 .
.
動画を観察すると、ダイオードの有の時の青色の線、即ちモータの上流(ダイオードの下流)のCH2の電圧波形が、ダイオードが無い場合の波形と殆んど同じである事が分かる。 これは、モータの挙動が上流に影響している事を示していると考えられる。
しかし、ダイオードの有の時の黄色の線、即ちドライバの出力側であるCH1の電圧が、何だか変な動きをしているのである。 ダイオードによってモータとドライバの間を遮断したつもりなのに何でだろうか?
この疑問に対して、上に紹介したモードの説明図の中の入力信号Lの時の図を見ていて、あれこれと考えているのであるが、モータに流れている電流が点線で示されている様に、上流から還流してきている事が関係しているようである。
しかし、ここで注意しておかなければならない事は、オシロデータのグランド接地がモータの出口側であることに注意して於いて欲しい。 実験はモータを基本に考えていたので、電圧測定もここを基準点にしているのである。 ドライバーのGND点を基準にすべきだったのかと不安になってきたのである。
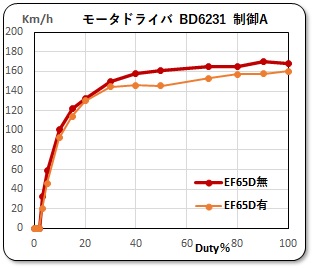
ともかく、この時のデューティ比と車速の関係は、右のグラフの様にダイオード有り無しにかかわらす大きな非線形特性となっているのである。
■ 制御Bでの挙動
次に、ドライバ周りの配線を代えて制御Bのモードで実験した。
ショットキーバリアダイオード無の場合 ショットキーバリアダイオード有りの場合
 .
.
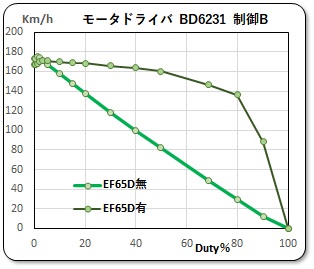
波形の様子は、先回報告したTB6612と同じ挙動であるが、ただ、デューティ比が逆転しているのである。 これが否定記号の意味だろうか。 デューティ比と車速の関係を示す右のグラフにもそのことがはっきりと示されている。
でも制御Aでは右上がりのまともな(?)特性だったのに、制御Bでは右下がりの反転した特性になったのはなんでだろうかと・・・・・・・・。 これまた老いぼれた頭の中が混乱中である!
■ データをまとめる
ともかく、上記の二つのケースについて、まとめてみました。 ダイオード有の場合は実際とは異なるので除外して整理しました。
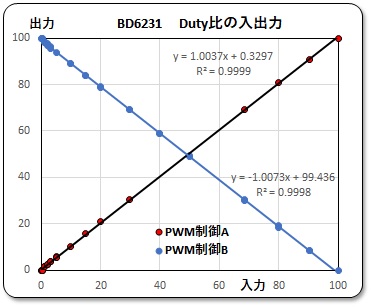
デューティ比と車速の関係を下左に示すグラフに示す。 制御Aでは非線形であるが、制御Bは線形となる。 また、デューティ比の信号入力と出力の関係を下右にしめすが、制御Bでは反比例の関係となっている。
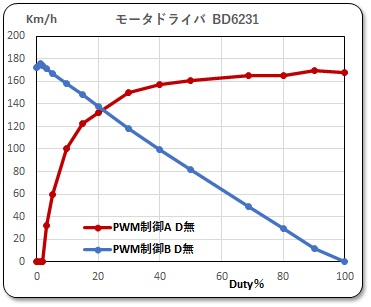
ROHM製のフルブリッジドライバ BD6231がこの様な制御を採用したのは何故だろうか。 制御AとBの使い分けは何か目的がある筈であると推察するのだが・・・・・・。 またまた、疑問が増えてしまった。
■ 追記
ROHM 社のホームページの Tech Web にモータの基礎知識の解説が記載されていた。 興味を引いたのは、PWM駆動の電流回生方法の説明です。 PWMパルスがOFFの場合に、モータに流れている電流を回生する(吸収する?)方法を、四つの例で説明されていましたが、何故だか制御Aの場合の例がありませんでした。
また、コアレスモータの場合はどうなるのかも説明がありませので、はやりモータの素人には充分には理解できませんでした。
2021/5/20 作成