HOME >> マイコレクション > 電気機関車リスト > EF57 8
直流電気機関車: EF57 8


戦前生まれの電気機関車は、前面にデッキを持つており、2C+C2の旅客用電気機関車はデッキも長く、俊敏な感じである。 特にEF57は、パンタグラフが前面に飛び出しており、より精悍な容貌になている。
EF57 8号機は昭和17年に製造され、私と同様に戦前生まれである。 沼津機関を中心に東海道線で活躍するが昭和51年に廃車される。
メーカー : KATO
商品名 : EF57
品番: 3069
車両番号: EF57 8
発売日 : 2,012年
入手日 : 2012年8月 新品購入
定価 : \7,875.-

● カプラーはナックルカプラーに交換する。 2エンド側はトリップピン付きにした。
● カーブ走行時の先行輪脱線対策として、先台車の浮き上がり防止のため、動力台車の裏側に 1mm のプラ板を貼りつけて対策する。 効果あり。
連結面間距離 |
138.5 mm |
車体重量 | 74.90 gr |
前台車動輪荷重 | 37.4 gr | 後台車動輪荷重 | 37.5 gr |
| ギヤ比 | 19.0 | 動輪直径 | 8.4 mm |
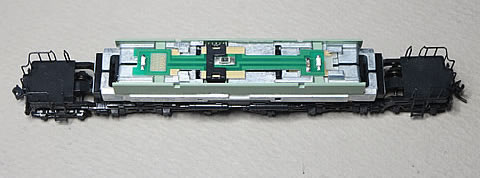
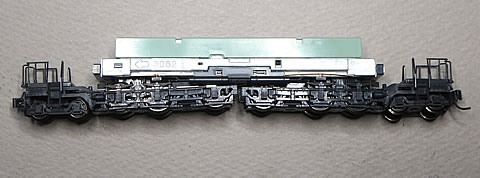
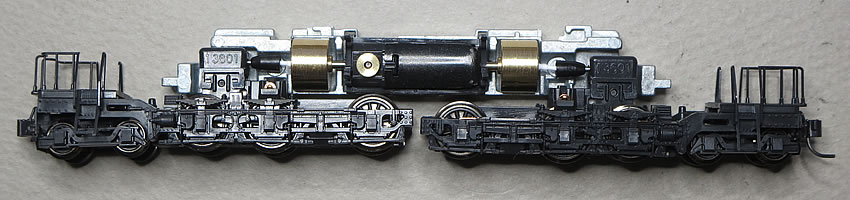
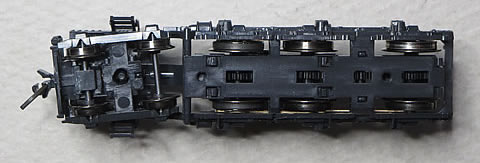
● 斜め上と斜め下から見て全体像を示す。 前後の長い動力台車が旧F型の電気機関車の特徴ですね。


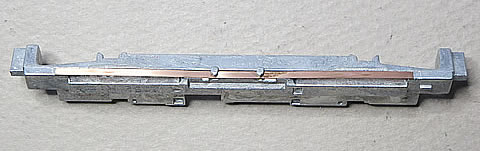
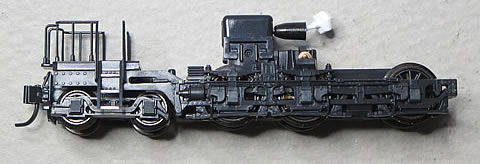
● 車体を取り外したフレーム部分を示す。 新サスペンション機構による台車支持方法である。 また、ライト基板も新しい形式であり、モータのフライホイールが見えないのである。
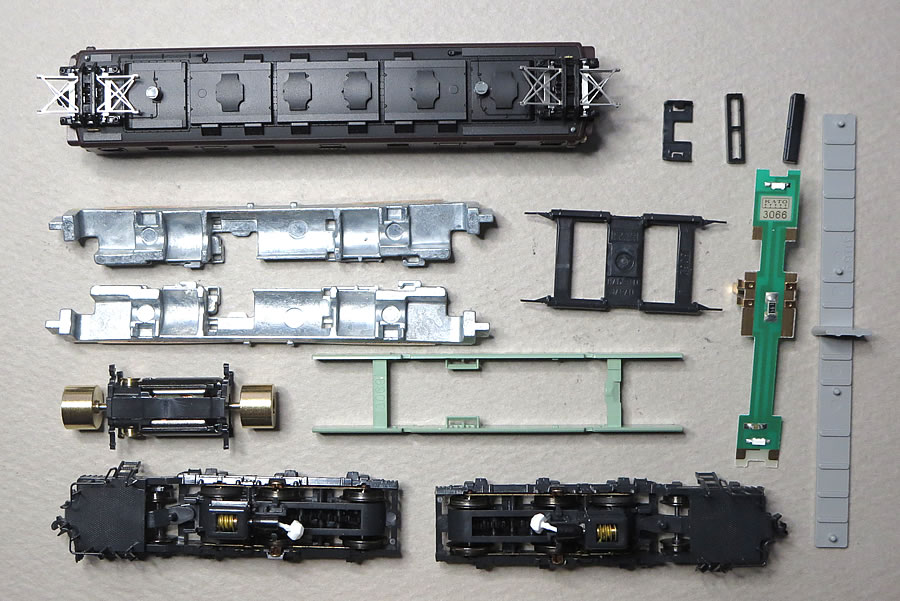
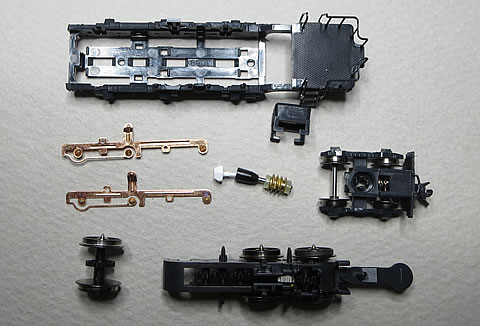
● フレーム関係まで分解した状態を下に示す。 ネジ類が使われておらず、はめ込み式で組み立てられている。
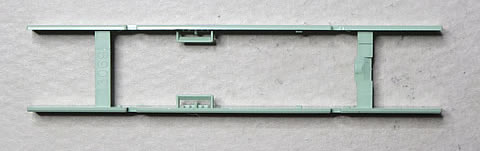
● 左右のフレームの表側と裏側である。 前方を示す矢印が刻印されており、再組み付けのためのマーキングは必要なさそうである。

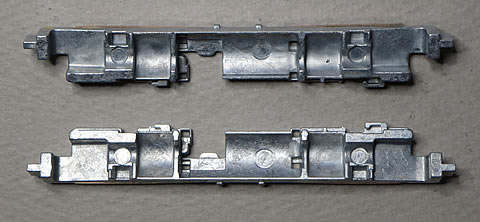
● フレームの下側の淵には下左の写真に示すように、台車支持用バネが保持されている。 そして、台車の集電子の頭が接触するようになっている。 この構造は「KATOの動力機構の変遷 電気機関車編 その3」で紹介したように、【特許番号】 特許第4357272号で権利化しているパテントの内容を具体化したものである。
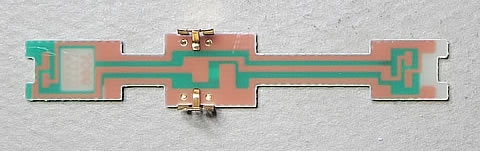
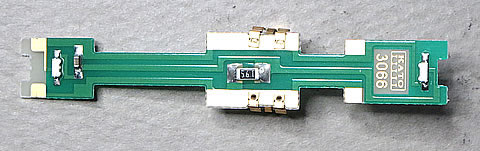
● 右上の写真は、フレームの上部を固定する枠であるが、モータ端子につなぐ金具部品を規制する枠が中央部に設けられている。 下のしゃしんに、ライト基板の裏と表を示す。 この基板はフレームとモータ端子をつなぐ配線も兼ねている。
中央部の金具は、モータ端子につなぐ部品であるが、この基板の回路をみると、台車からモータまでの通電経路が理解できる。 それは、 レール ⇒ 車輪 ⇒ 集電子 ⇒ 台車支持バネ ⇒ フレーム ⇒ラ イト基板 ⇒ モータ端子につなぐ金具 ⇒ モータ端子 という経路である。 ここで、モータ端子につなぐ金具は、従来の構造の様に、フレームとは直接接触していないのは不思議な気がした。 なぜ、あえてこのような構成にしたのかと思っていたが、DCC用のデコーダを搭載する場合の事を考慮しての対応だと考えると納得がいく構成である。
 .
.
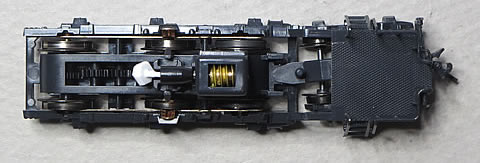
● 次に動力関係の構成を見てみよう。
まず、台車を下から見た状態を右に示す。 先台車は動力台車に首振り出来るように支持されおり、さらに回動可能に保持されている。 要するに自由自在に動く事が出来るのである。 従って脱線もしやすいのである。
また、動輪は6軸全てが駆動されている贅沢な構成であるが、中間の車軸は工夫された集電子のバネ作用で保持されいるので、レールの押しつけ荷重は期待できず、従って牽引力も期待できないのである。 この構造は、平成18年1月31日に出願された特開2007−202657にて公開されている。
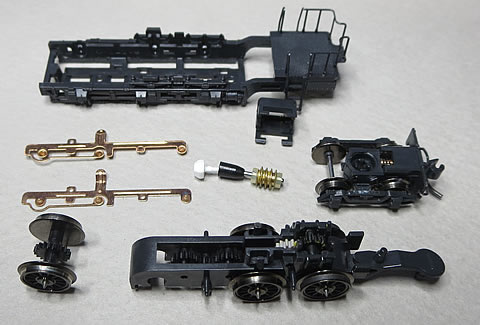
● 下の写真は動力機構に関係する部品を重ねてみたものである。 ただ単に部品をはめ込んだだけの手抜き撮影であるが、その構成が理解できよう。
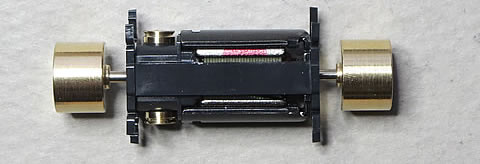
● モータと動力台車を下に示す。
● さらに分解状態を下に示す。 集電子は複雑な形状の上にバネ部分が弱々しいので、取り扱いには充分に注意を払い、組み付けも苦労した。 あまり分解組付けを実施したくない部分である。 要注意なり!
● ここまで分解して、やっとギヤの歯数を数える事が出来た。 要するにギヤ比を知りたかったのである。 1条ウォームで減速した後、ウォームホイールでの回転は、多数のアイドラギヤを介して動輪の歯車に直接伝達だれている。 この間の増減速はなし。 そして動輪の19枚の歯車に伝達されているので、ギヤ比 i は、 i = 19 である。
動輪の直径は、金属車輪をノギスで測定して、 D = φ8.3 mm と読み取った。
【2014年12月】 改良した動力特性測定装置を使用して性能特性を再測定する。 この改良された測定装置では、従来の項目に加えて、走行中のモータ端子電圧とモータ回転数の測定を可能にしている。 2014/12/21 追記
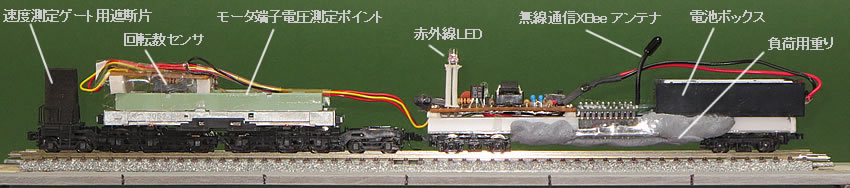
↑ 測定対象の動力車(EF57-8号機)と測定車
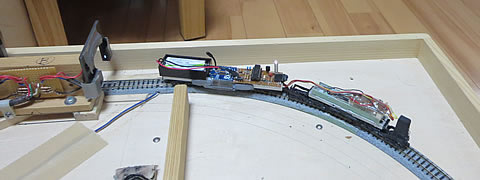
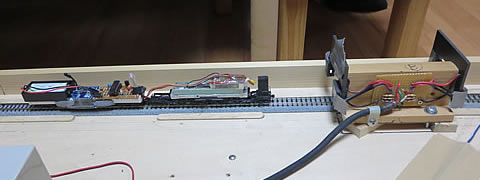
↑ 測定中の走行状態
● EF57-8号機の重量: 69.5グラム、 測定車の重量: 92.5グラム、 走行抵抗: 1.2 グラム
****************************** 牽引力特性 ******************************************
速度特性:
平坦路にて走行させ車速と電圧、および電流と電圧を測定し、走行性能を計測する。
測定日: 2014年12月18日
測定車の測定ユニット:モデル3
スケッチ: New_Keninryoku_test5
走行は安定した走りであったが、データを見ると、少しバラツイテいる。 新しいモデルなので、もう少しビシットしたデータを期待したのであったが・・・・・、やや不満の残るデータである。
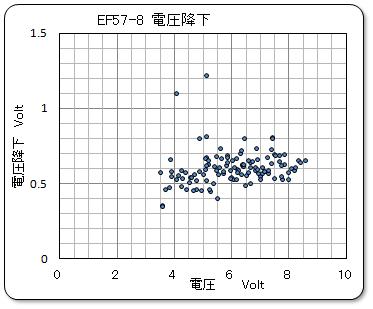
電圧降下量については、 0.5 〜0.7 ボルト前後で安定している様子である。
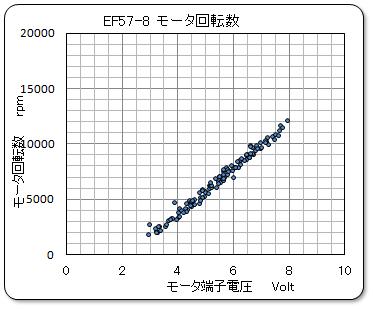
モータ回転数については、単品無負荷時のデータが無いので比較出来ていないが、端子電圧に対してモータ回転数がバラツイテいるのは摩擦抵抗がバラツイテいる影響だろうか。
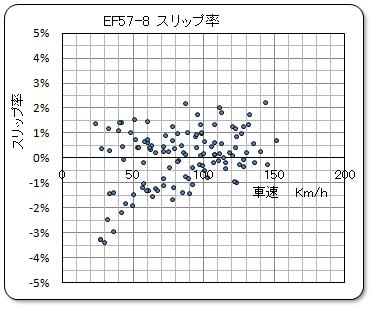
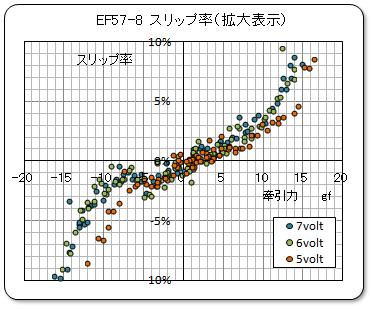
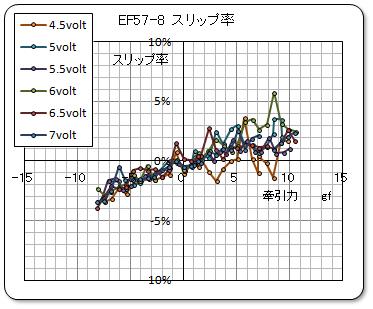
このモータ回転数から計算したスリップ率は - 2 〜 + 2 %前後と納得がいく値を示している。
******************************
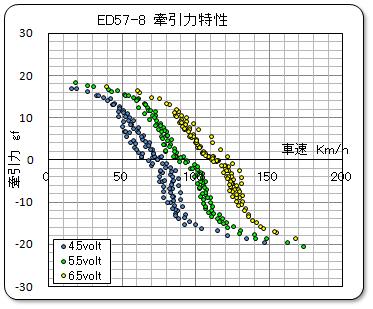
牽引力特性:
次に牽引力特性を測定した。
測定日: 2014年12月18日/19日
測定車の測定ユニット:モデル3
スケッチ: New_Keninryoku_test5
各グラフを簡単に説明しておこう。
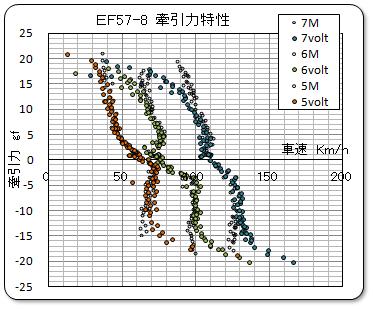
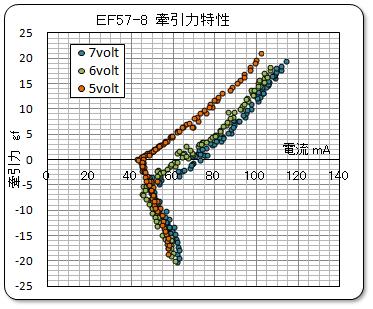
まず、牽引力と車速グラフは従来の表示方法に加えて、モータ回転数から計算したスリップ率ゼロの場合の車速度を重ねてプロットしてみた。 M と表示したプロット点である。 牽引力と電流のグラフは従来通りである。
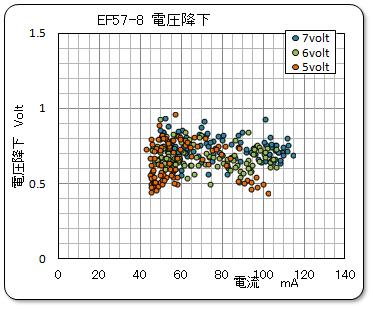
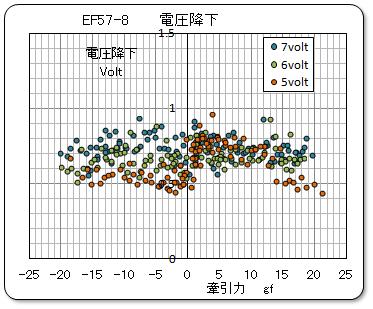
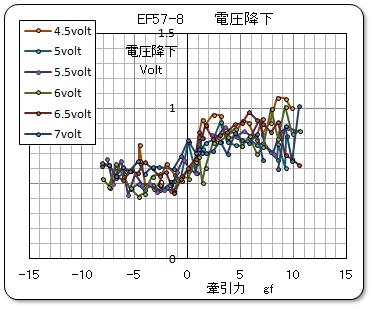
電圧降下のグラフは、レールに供給する電圧とモータ端子電圧の差を計算したもので、車輪とレール、車輪の軸受部、台車の集電子と車体との間、の接触抵抗による電圧降下量である。 当然、プラス側とマイナス側の合計値である。
この電圧降下量を電流との関係と牽引力の関係とでグラフ化している。
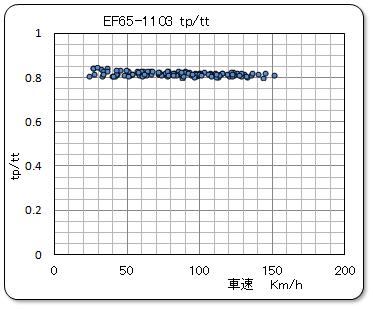
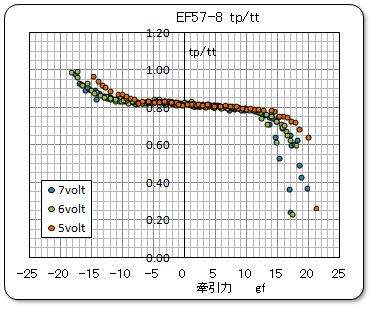
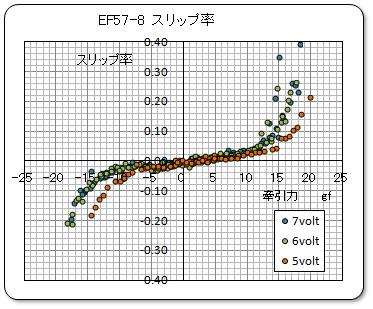
次に、モータの規定回転数をカウント完了する時間 tp と速度計測ゲートを通過する時間 tt との時間比率 tp/tt をグラフ化して、車速とモータ回転数の比率を見ている。 この比率が変化する事はとりもなおさず車輪が滑っている事を示している。 そしてこの値をもとにスリップ率を計算してグラフ化している。
*****************************
まず、牽引力と車速グラフより、牽引力側のスリップ領域では、スリップ限界のかなり前から車輪が滑り始めているのが分かる。 その様子はスリップ率のグラフでも明確に表示する事が出来るようになった。 注目していた制動領域での振る舞いは、制動力が増加しても、モータ回転数と車速は殆ど変化せず、最後には車輪がスリップするため、車速のみ増加している様子である。 これは、ウォームの歯面で発生する摩擦トルクは殆ど変化しないか、あるいは、僅かにしか増加しない事を示しているのではないだろうか。
また、この牽引力のグラフは供給電圧によってパターンが異なっているように見えるので、下記の追加実験を実施した。
牽引力と電流値のグラフにおいてパターンが少し弓なりにんっているのは、どこかに非線形要素が潜んでいそうである。
また、5ボルトデータは翌日に測定したのでどこかの条件が変化したのかもしれないが、不明である。
電圧降下は、その変化量が大きいものの、バラツキが少なくなっている。 電流との関係では何かの傾向が出るかと期待したが、あまり変化は無く、牽引力と何か関係がありそうである。 傘形のパターンにも見えるし、駆動側と制動側で変化しているようである。
一方、tp/tt のグラフは、ピタリと一致した安定的なグラフをしめしており、その結果、スリップ率のグラフも綺麗なパターンを示している。
これは、モータ回転数が安定して計測出来ている事を示していると判断している。
*******************************
追加実験:
牽引力のパターンが電圧によって変化していうように見えたので、牽引力の小さい領域で、電圧を変えて調べてみた。
測定台が水平な状態(走行負荷が1.2グラムの状態)から、勾配を上げていき、負荷を増加させていった。 測定は上り坂と下り坂が交互に出てくるが、測定後に牽引力の大きさ順に並べ直して、プロット点を線で結んでいる。 測定は各電圧設定において、1回のみ実施している。
0.5ボルトおきに測定したが、電圧違いによるパターンの変化は認められないようである。 右のグラフ参照。 最初のデータは何を測っていたのだろうか? と疑問になるのだが・・・・・・。 原因は定かではない。
しかし、マイナス1グラム付近でパターンは折れ曲がっているが、これは動輪部の摩擦抵抗と推察しているが、それにしても摩擦抵抗が小さいですね。
流石はKATO製ですか!
また、電圧降下とスリップ率もグラフにしてみたが、なかなかおもしろそうなグラフですね。 電圧降下は駆動側と制動側で変化していると推定すると、どうして? と疑問が湧き出てくる!
まとめ:
このEF75-8号機は、EF65-1103号機と同様に、台車の保持機構と駆動機構が変更された新しいモデルであるが、動力性能に少し安定性が少し欠けているようにも思われる。 実験データの再現性も疑う必要があるが、だんだん泥沼に入っていくような気がする。 とにかく色々な車両を手当たり次第測ってみる必要がありそうである。
(以上 2014/12/21 追記)
ここに示す動力特性の測定は、安定化電源を使用した自動測定システムにて実施する。 測定実施日: 2014/5/29
測定時はED16 3 の時と同様に、デッキ部分に紙のカバーをかぶせて測定する。
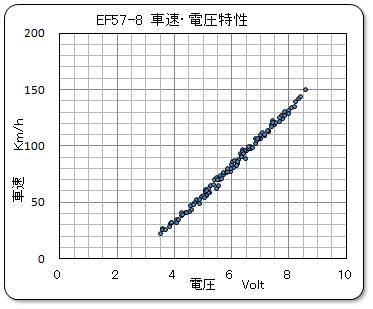
1)速度特性:
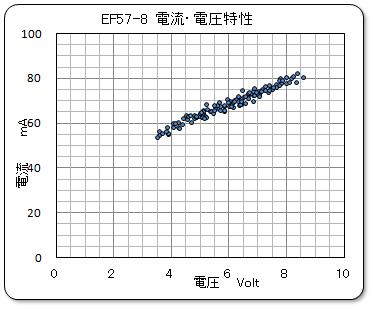
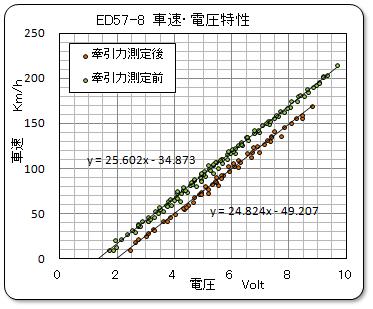
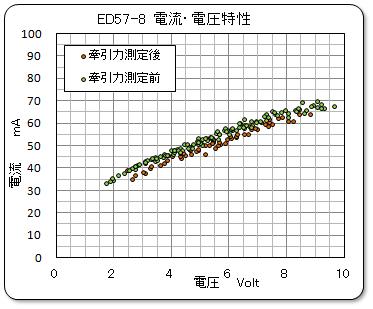
動力車の速度特性として、速度・電圧特性と電流・電圧特性を右に示す。
速度・電圧特性と電流・電圧特性共に直線的であり、ばらつきも小さい。
また、スケールスピード 10Km/h 近くの極めつけの微低速でも、非常にスムースに走行していたのには驚きである。電流も小さく、ばらつきも小さいようである。 ED16同様に、KATOの新しいモデルの特徴であるようである。
しかし、下記の牽引力特性を測定中に牽引力がゼロの時の値が、この速度特性と少し異なっていることに気付き、牽引力測定後に、再測定を実施した。
その結果をグラフに重ねて表示しているが、スケール速度で 20Km/h 近くも速度が低下しているのである。 このような速度低下の現象は、測定中の走行によって車両の内部摩擦抵抗が増加したとも考えられるが、摩擦抵抗が増加すると電流値が増加するはずなのに逆の状態である。 摩擦抵抗の変化とは考え難い。 他の原因として電気的な接触抵抗が増加して電圧降下が発生し、モータの端子電圧が低下したのではないかと想定する。 グラフからはおよそ 1Volt の電圧降下が発生していると想定するならば、データ的に合致する。 でも、車両の車輪を見ると当りは付いているものの綺麗な状態である。 すると内部のどこかで接触抵抗が増加したのだろうか?
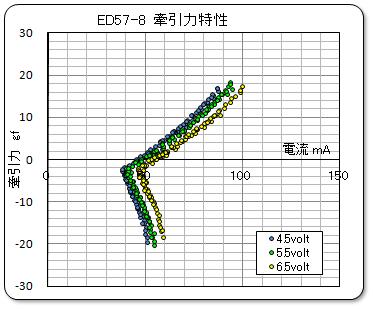
2)牽引力特性:
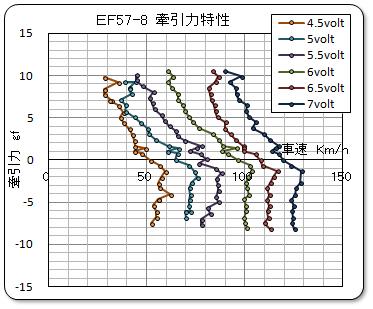
動力車の牽引力特性として、牽引力・車速特性と牽引力・電圧特性を右に示す。
粘着領域での牽引力は およそ 17 グラムであり、車輪のスリップは14グラム近辺から始まっているようにみえる。
ウォームギヤの噛合い方向が変化する遷移点は、マイナス2 グラム近辺のようである。
駆動側から制動側に移行する特性パターンは、やや凹んでいる特異な形状をしており、構造的な要因がありそうである。 また、測定中に特性がドリフトしていると思われる様相をしめしているが、速度特性でも説明したように電気回路の接触抵抗増加による電圧降下の影響ではないかと疑っている。
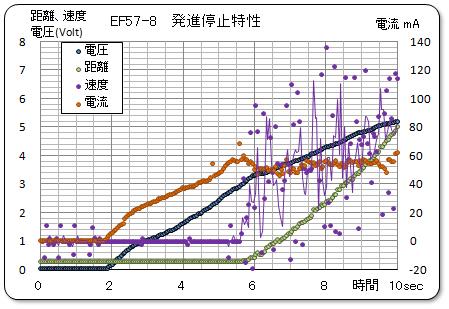
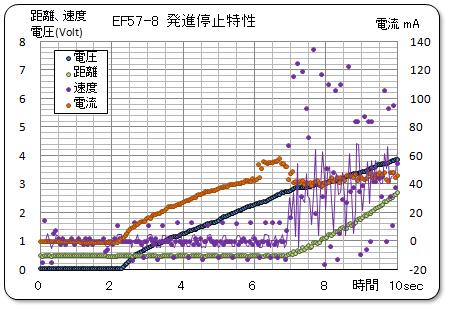
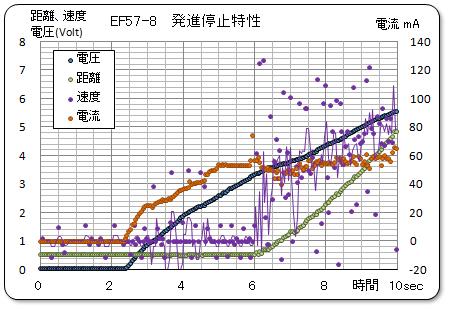
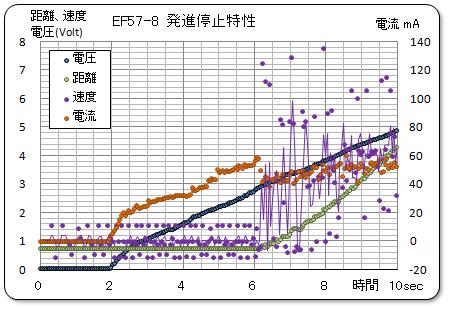
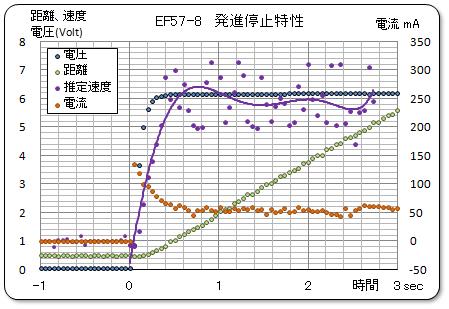
3)発進特性 ランプ応答:
超音波方式の距離センサーを使用した計測システムで発進時のランプ応答を測定した。 当車両は新しいモデルであるため、走り始めの電圧は3ボルト前後から、スムースに走り始めている。 下に4回の測定データを示す。 グラフの見方は、「発進停止特性を測定する」を参照ください。
 .
.
走り始めの電圧が 3 Volt 前後であった。 走りだしは急に飛び出すことも無くスムースに走りだしている。 走り始めの電流の落ち込みも小さいようである。
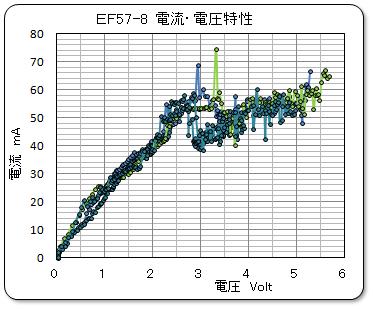
この4回のケースの電流・電圧特性をまとめて右のグラフにに示す。 電流の上昇具合はほぼ一定であり、ゼロからおよそ 20 mA/Volt の勾配で電流は上昇していくが、この勾配の値からモータの内部抵抗は 50Ωと計算される。
モータが回りだすと(1)のデータに近づくはずであるが、ほぼ一致している。
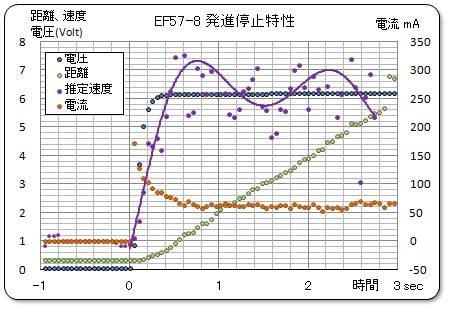
4)発進特性 ステップ応答:
停止状態から、スケール速度 100Km/h のスピードまでステップ状に加速させる場合を測定した。 2回測定したデータを下に示す。 立ち上がりやオーバーシュート状態を観察しようとしているが、まだ未完成である。 (やや諦め気味である) この車両はフライホイールを搭載しているが、その効果は小さく、立ち上がりは早い方である。
5)停止特性:
スケール速度 100Km/h のスピードで走っている状態から、電源を突然切ってしまった状態にして、その停止までの走行状態を観察しようとするものである。
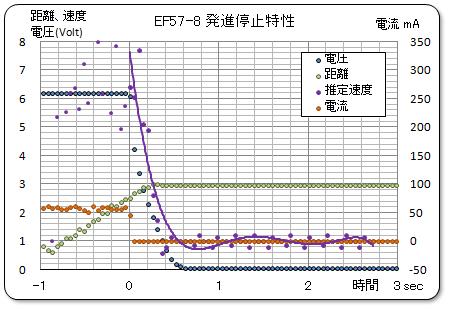
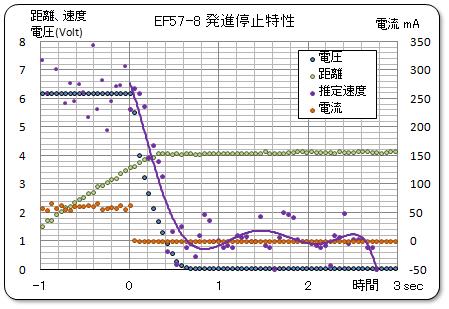
フライホイールが搭載されているが、停止距離は 4.5mm と 5.5mm であり、目視観察では、スーと止まる感じであった。