HOME >> マイコレクション > 蒸気機関車リスト > C11-325 号機
小型蒸気機関車: C11-325 号機


C11形はローカル線や入れ替え用の機関車として登場したタンク機関車で381両が製造された。 現在でも各地の鉄道会社で観光列車などを牽引している。
C11-325号機は栃木県の真岡鐵道で、C12形と共に 「SLもおか号」のけん引で活躍している。
メーカー : TOMIX
品名 : 真岡鉄道 C11形蒸気機関車(325号機)
品番 : 2643
車両番号: C11-325 号機
発売日 : 2017年3月31日
入手日 :2017年3月31日
定価 : \14,800.-
● このモデルは、TOMIX社初のフライホイール付コアレスモーターを搭載した蒸気機関車モデルである。 コアレスモータをボイラ内に収めているため、運転席の空間が確保されており、全体のスケールもNゲージスケールの 1/150 を確保している。


| 連結面間距離 | 87mm |
車体長さ | 79 mm | 動輪直径 | D = φ10.0mm | ギャ比 | i =34.22 |
| 車体全重量 | 39.9 gf | 動輪車軸荷重 | 29.9 gf | 先輪車軸荷重 | 4.4 gf | 従輪車軸荷重 | 5.6 gf |

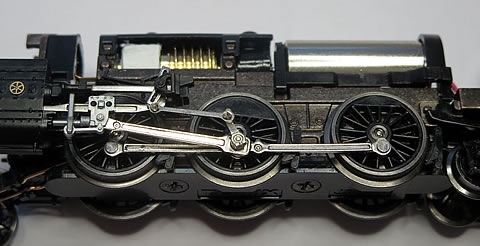
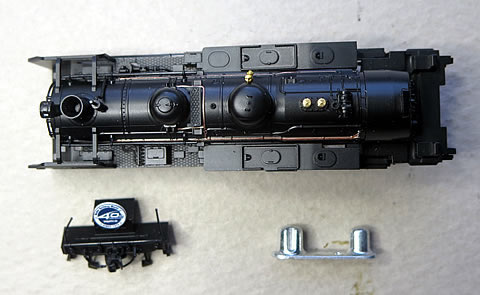
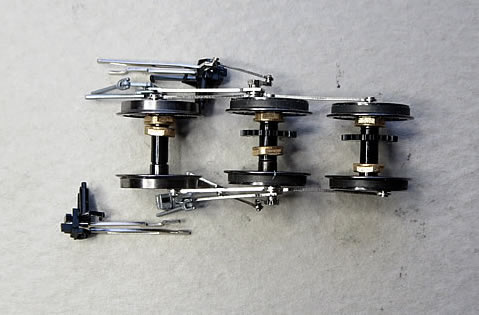
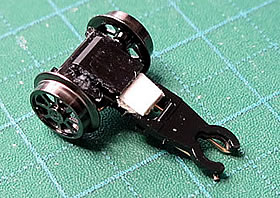
● 小型タンク車の欠点である集電性能について、 先輪と従輪でも集電させることにより改善している。 さらに牽引力を確保するため第2動輪にもトラクションタイヤを装着している。 ロッド類の細工も細かく実施されている。 車体下側の様子を下に示す。
● 自分はナックルカプラーを標準仕様としているが、カプラーポケットが無い構造のためナックルカプラーを装着出来なかった。 そこで止む無くTNカプラーを選択した。
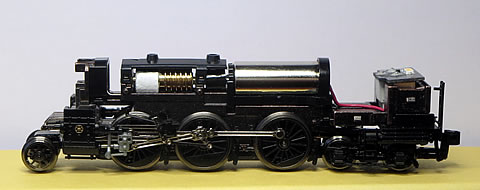
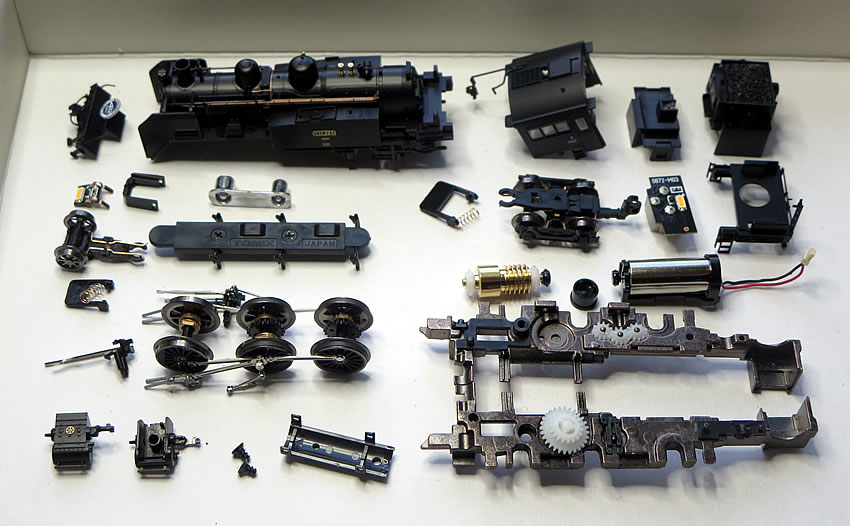
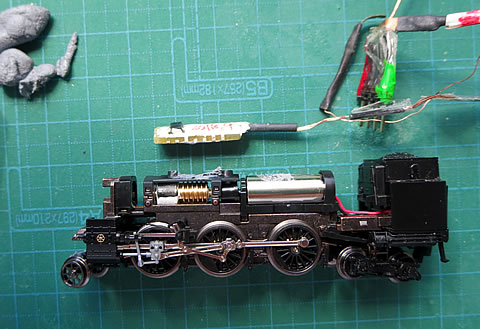
● 部品を少しずつ分解して行こう。 分解方法については、多くの人が説明されているので省略するが、記録としての写真だけは撮影しておく。 ボイラーやキャビンを取り外した状態を下に示す。 フライホイール部分に白黒ペンキが塗られているので、再組付け時の撮影である事がバレバレですね。

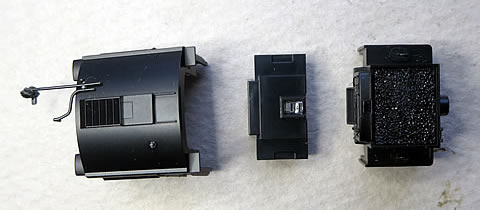
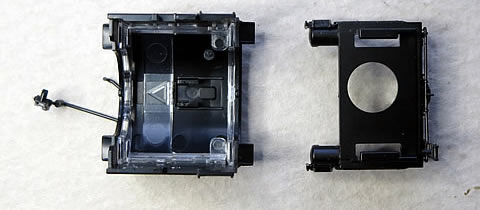
● キャビンやコールバンカーの部分です。
● 殆どの部分を分解した状態を下に示す。 分解する目的は、ギヤ比やモータ単体性能を知りたいが為に実施するので、必要の無い部分はなるべく分解し無いようにしている。 ここまで分解しないとギヤ比を調査出来ないのです。
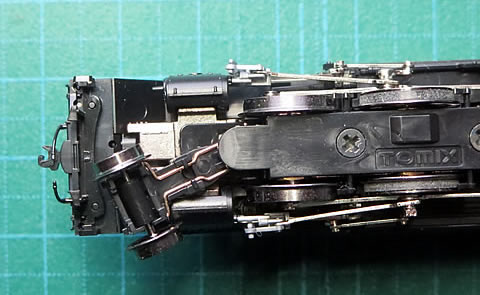
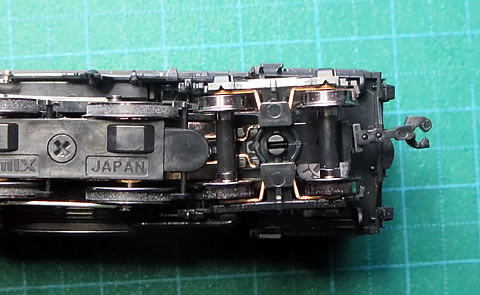
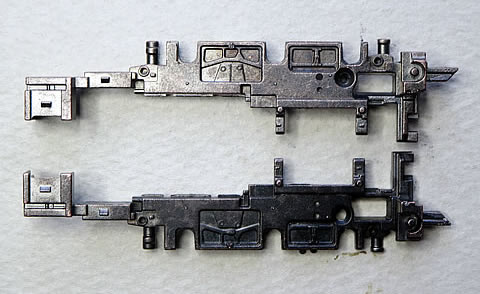
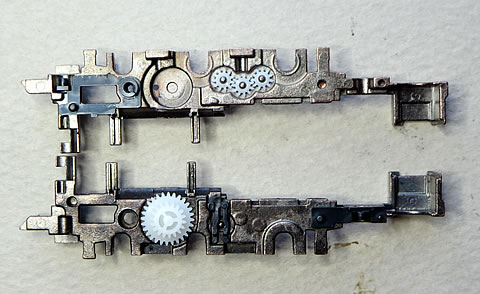
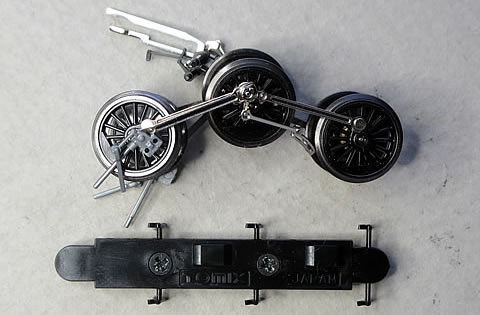
● シャシーの表と裏を下に示す。 上下や前後は気にせずに撮影しています。 形から推定したください。 下右の写真を見ていた不思議な形のスペーサがアイドラギヤの部分に挿入されています。 ちなみにC57の場合でも同じような形のものが採用されています。 何でしょうかねこれは?
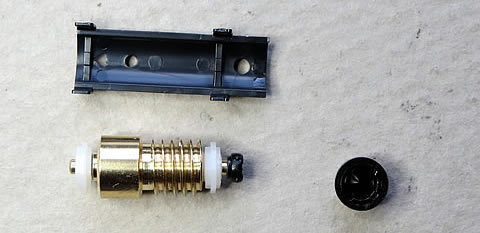
● コアレスモータとウォームを取り出しました。 コアレスモータはφ7.0×16.5mm の円筒です。 KATO製は φ7.0×20.0mm ですから少し短いですね。 配線はKATOと同様に細い導線ですが、下の写真にしめすように小さなコネクタが付いています。

ムムム! これではモータ単体での性能測定が実施できない!
導線を切断すればクリップに挟むことが出来るのですが、再組付けが不可能となってしまう。 ピン型のコネクタならクリップで挟めるのに!
コネクタとしての常識は門外漢なので知りませんが、家庭用コンセントなどにみられるように、電気が来ている上流側がメスコネクタで、差し込む側がオスのコネクタが一般的と自分は考えるのですが、如何なものでしょうか? 上流側がピン形状の場合は、ショートの危険性があり、危なくて採用出来ないはずと考えているのです。
ここでは電源側とは反対の下流側ですので、ピン型コネクタで良いはずなのですが、箱型の特殊コネクタを採用されています。 TOMIXさんの場合は、他の部分でも同様に感じたことがあります。 設計ポリシーですかね。 また、Arduino では自分と同じ考えで、基板のコネクタはメス型になっています。 でも RaspberryPi では、逆であり、基盤の上にピンコネクタが乱立しています。 それも電源の供給部さえも! うっかり、針金などを接触させてしまうと、基板をパーにしてしまう恐れは無いのでしょうかね? 電源を切ってから作業しなさいと言う事らしいです。
と言うことで、楽しみにしていたモータ単体の性能測定は見送ることにしました。 貴重な一台ですので・・・・・・・。
上右の写真にウォームとカップリングとウォーム押さえを示す。 ウォームはフライホイールを兼ねているかのように、ど太い一条ネジでした。 後方には問題のカップリングを介してモータと連結しています。
● ロッド類を下に示す。今回の調査では動輪軽と動輪ギヤの歯数が知りたいだけなので、ここまでしか分解していません。 C57の場合は、一体型だったサイドロッドがC11ではKATOと同様に分割式になっていました。
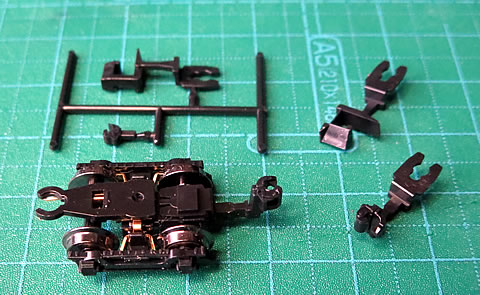
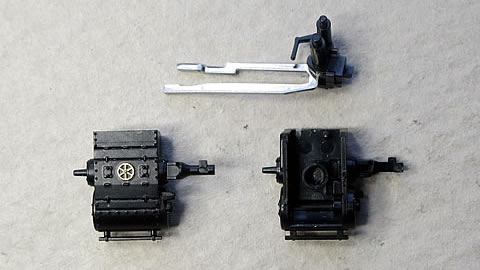
● シリンダ部を下に示す。排水弁も造作されています。 下右には先台車と従台車を示す。 バネで押さえている揺動板で各台車を線路に押し付けています。

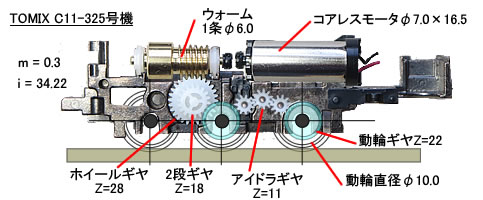
● 伝達機構の諸元を測定した。 その結果を左のイラストに示す。
歯車類のモジュールは、すべて m = 0.3 であった。 ウォームは一条の右ネジであり、ホイールギヤは Z = 28 と Z = 18 の2段ギヤになっていた。 このギヤは第2動輪の動輪ギヤに噛合っていた。 そして、第2と第3動輪のギヤは、3個のアイドラギヤでギヤ連結されていた。
このギヤ連結の意味が理解できないのだ。 第2と第3動輪とは、しっかりとしたロッドで連結されているので、あえてギヤ連結は必要ないはずである。 逆に調整を間違えるとコジレてしまい、作動不良に陥る恐れがあるのである。 それも小さなアイドラギヤを3個も介して連結させているのだ。 精度は大丈夫であろうか。 最近のKATOさんは、ギヤ駆動はモータに連結している1軸のみで、後はロッド駆動である。
自分の個体は、しっかりと調整されていたので、回転は滑で問題無いのであるが、あえて危険な構造にした理由を理解できないのだ。 もし動きが悪いようであれば、アイドラギヤは外すだけであるが・・・。
各歯車の歯数が分かったので、ギヤ比を計算しておく。 減速ギヤ比 i = 28 * 22 / 18 = 34.22 となり、KATOシリーズとほぼ同じですね。 また、動輪軽はφ10.0mm でしたので、モータ1回転当たりで車体は、0.918mm 進むことになる。 この値もKATO とほぼ一緒ですね。
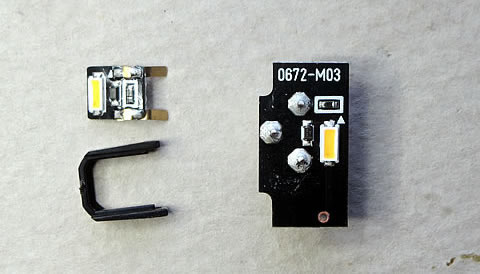
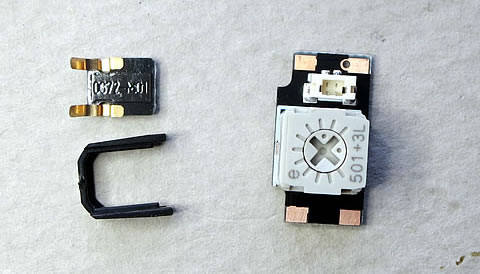
● 次に照明関係を調査しておこう。 前方と後方のライトユニットの表と裏を下に示す。 チップ式のLEDと2.2KΩの抵抗を使用していた。 後方のライトユニットには、501の半固定抵抗らしきものが取り付けられていたが、回路構成は不明である。 裏側の3本の足の部分を使ってテスターで抵抗を測定しようとしたが、表面処理のせいなのか上手く測定出来なかった。
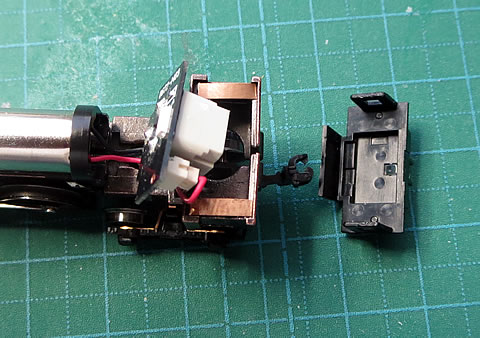
● この後方のライトユニットのコネクタは下の写真に示す様に、モータのコネクタと接続するようになっている。 ここで、走り出しの調整を実施しているのだ。 なお、このユニットは、上からカバーでシャシーに押さえているだけなので、接触不良が頻発してしまいました。 基板の端部にあるパターン部分とシャシーの凸部分が接触するようになっているのですが、寸法精度だけなのか、プラスチックの弾性を期待しているのか分かりませんが、これでは不安定だと素人でも思ってしまいます。 前方のユニットのようにバネ式の脚を使うべきと考えます。
 .
.
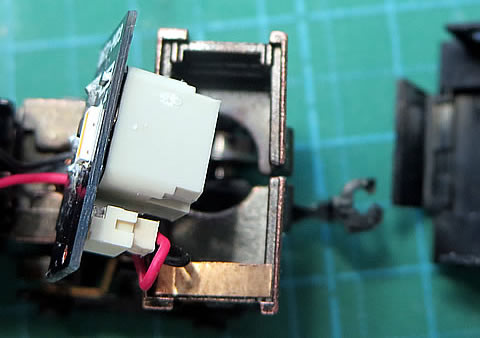
● 上の写真は、この接触不良対策のために、2×7×0.1mm のリン青銅を切り出して少し湾曲させて基盤とシャシーの間に挿入するようにしたものです。 右側の写真の上方は、このリン青銅板無い状態で、シャシーの上面に少し膨らんだ部分が問題の凸部分です。 ここまで気を使っているのに・・・・・・効果無しですね。
なお、モータコネクタ部の足元には、電極のハンダ付け部が露出しているため、ここに接触してショートする場合があったので、リン青銅の湾曲を裏表逆にして組み付けている。 ハンダ付け部を逃げる形状にしても良いだろう。
● 不具合対策である先輪の脱線対策として、先台車の腕の上面に 0.5mm のプラ板を張り付けた状態を右に示す。これは、線路上の段差などに刺激されて先輪がピヨンと脱線してしま事への防止策である。
■ 動力特性測定のための準備
走行中のモータ回転数とモータ端子電圧の測定のために、機関車に細工を実施する。 この項目を測定すると、動輪のスリップ率と、線路とモータ端子間の電圧降下量(即ち、集電性能の良し悪しが検討できる)が計算出来るのである。 そのためには、機関車に回転数検知センサーの取り付けなどの細工を実施した。

 .
.
上の写真は測定後にばらした状態であるが、使用した部品類を示している。 回転センサと電圧測定端子は、「有線通信のための信号ユニットを作る」で紹介した道具を使用した。
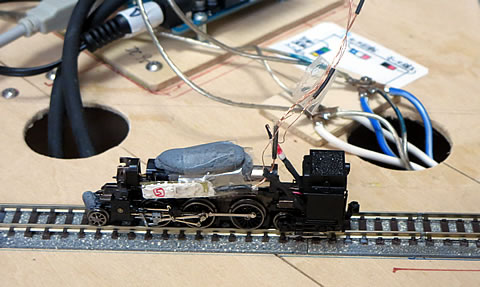
ウォームと一体となっているフライホイール部分に、分解時にマーキングを実施している。 白黒のアクリル絵具を塗り分け、1回転当たり2回のパルスを発生するようにしている。 TOMIXのC11は、側面からマーキングを覗くことが出来るので(右上の写真)ここにセンサを取り付けることにした。
取り付けには、U字型のプラ片と水草の重りを使用して位置を決め、セロテープで固定した。 また、モータ端子電圧を測定する場所が無かったので、シャシーに取り付けている。 これも、特殊なコネクタを破壊する勇気が無かったからである。
センサ類を取り付けた機関車の状態を右に示す。 車両の重量を実際の場合と合わせるために、水草の重りを取り付けて補正している。
■ 測定の実施
有線通信方式による動力特性測定システムによって測定した。 測定実施日:2017年4月19日
しかし、すぐにトラブルに遭遇する。 まず、車両が動かないのである。 再組付け途中でのチェックでは正常であったのに? コールバンク部分を少し捻じるとスーと動き出したが、今度は配線に引っ張られて脱線してしまう。 釣り竿の位置を調整し直して、再度動かそうとするとまたもや動かないである。 ヘッドライトは点灯しているので、基盤部分の接触不良と判断する。 再度調整して走行させると、今度はポイント部分で動輪が脱線してしまうのである。 何度か調整、再トライを実施するも、さすがに堪忍袋が切れてしまった。 TOMIXお嬢さんに嫌われてしまったのだ!
実験は中止する!
その後、基板部とシャシーの間にリン青銅板を差し込む工作を実施して対策したが、さすがに再実験する意欲は失せていた。
2017年4月21日 追記
**********************************************************************************************************************************
下記の動力特性は 「鉄道模型実験室 No.138 TOMIX製のC11-325号機の性能特性」 にて報告した内容を転記したものである。 ここではC11-325号機に関するデータのみを記載する。 そして、測定時に使用した電源は、PWM制御のTOMIX製パワーユニットN-1001-CL を使っている点が他の測定データとは異なっている。
測定日: 2017年4月1日、 測定車使用せず
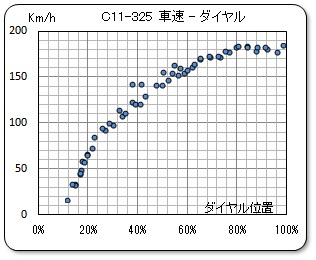
1)速度特性:
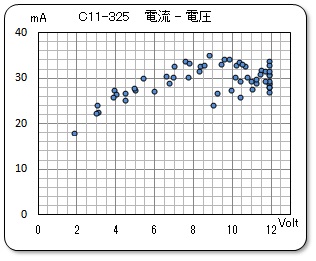
動力車の速度特性として、パワーユニットのダイヤル回転具合と車速の関係、および平均電圧と電流の関係をグラフに示す。
パルス制御方式の供給電源を使用しているため、フリーホイール電流の小さいコアレスモータとの関係で、特異な特性を示すことに注目すること。 供給電源は電圧制御をしていないため、従来のように横軸に制御電圧を持ってくるのは適切では無いと考えて、ダイヤル回転具合を示すダイヤル位置を採用している。 左にいっぱい回した位置をゼロとし、右一杯に回した位置を100としている。
そして、このダイヤル位置と、PWM制御のDUTY比、コアレスモータとの特性によって発生した平均電圧、その結果としての動力車の車速の関係を、それぞれグラフ化した。
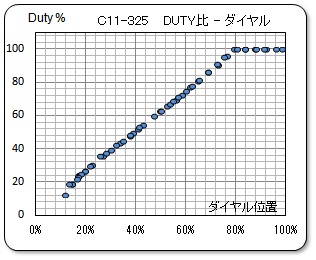
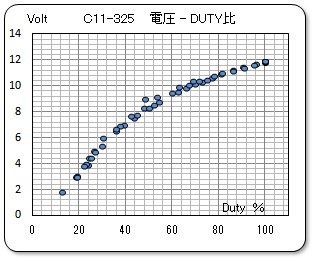
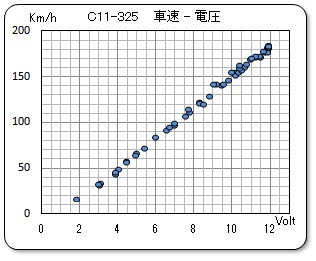
ダイヤル位置とDUTY比、および平均電圧と車速の関係はリニアな関係にあるが、DUTY比と平均電圧の間は非線形である。 この非線形の程度は、KATO製のコアレスモータの場合よりもおとなしいので、低速領域での制御は少しはやり易いのではないかと思われる。
消費電流は、一般的な動力車に比べて小さくなっているが、KATO製のコアレスモータの場合より倍以上大きい。
2)牽引力特性
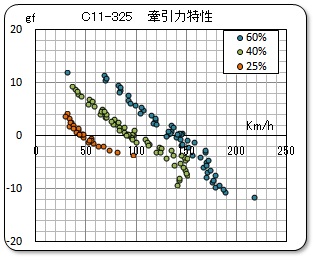
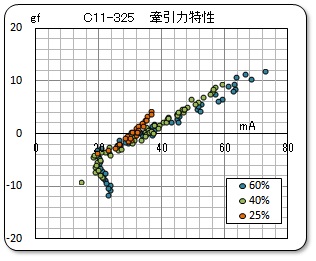
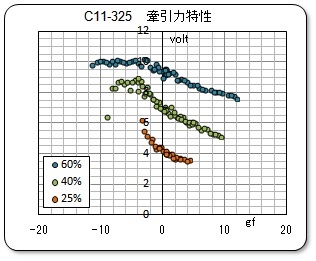
48.8グラムの重り車両を牽引させて牽引力を測定した。 パラメータとしてDUTY比を採用している。 駆動側および制動側ののスリップ限界は、およそ12グラムと読み取れる。 また、遷移点のデータより駆動系の摩擦抵抗は4グラム程度の小さい値と推測されるが、最大牽引力の 1/3 が内部摩擦で消えている事を考えると機械効率が悪いように思われる。
また、負荷が大きくなると速度の落ち込みが大きい事に留意して置く必要がある。 使用時に於いては、上り坂に入ると急速に速度が落ちる現象となって表れる。 その原因は、上右のグラフに示す様に、負荷が増加すると平均電圧が低下するので速度が落ちてくるのである。 これはパルス制御方式とコアレスモータの組み合わせの場合の特徴でもある。 通常のDCモータは、重い鉄心コアが有るので機械的なフライホイールの効果があるが、さらに電気的なフライホイールとしての効果もあるのである。 即ち鉄心があるために、急激な電流変化を阻害するので、結果として電圧変化も少なくなるのである。
しかし、上り坂になると速度が落ちる事は、現実の鉄道でも生じている事なので、その様子を楽しむことにしよう。
3)まとめ
特性データを測定中に、先輪の脱線や低速での走行不調など、データに現れないトラブルがいくつかあった。 ブログにて投稿されている方々と同様に、大満足の結果とは言い難いですね。 2012年に発売されたKATOのC56と比較しても優っているとは言えないと思います。 あえて言うならば、5年以上の開きがありますね。