
HOME >> 動力車の調査 > KATO製 EF64-1032号機の動力特性の解析
鉄道模型 動力車の調査 KATO製 EF64-1032号機の動力特性の解析
■ EF64-1032号機の動力特性の解析号機の動力特性
.
KATO製 EF64-1032号機の動力特性の測定データをもとにして、「抗力係数に注目して解析する」(2018/8/21)にて報告した方法で解析した結果を報告する。
■ 各種の定数を求める
動力車の数式モデルには、設定した定数の数値を同定する必要がある。 このために、測定データをもとに上記の解析方法を使ってそれぞれの定数を求めてみよう。
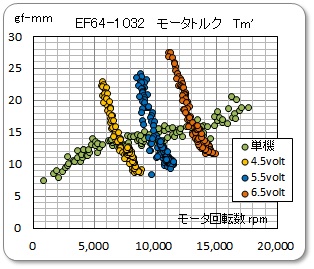
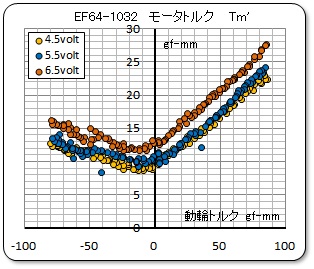
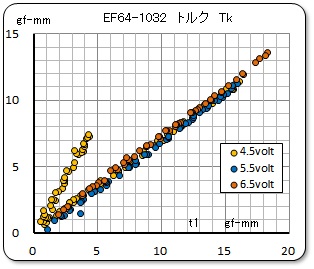
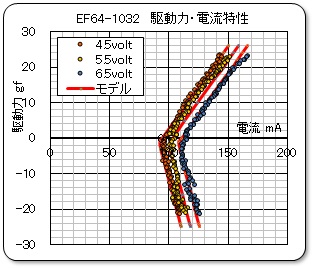
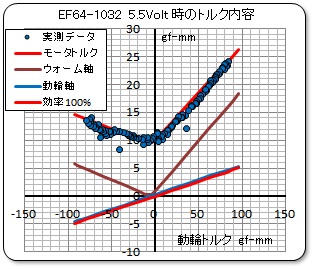
その作業の出発点として、右端のグラフに注目しよう。 このグラフは、モータ電流をモータのモデル式からトルクに換算し、モータ回転数を横軸にして表示したものである。
単機走行時と牽引力測定時の様子を示したものであるが、牽引力測定時の最低トルクに注目すると、この値が単機走行時のトルクよりも小さい事がはっきりとわかるのである。 これは、遷移点の状態を示しており、ウォームギヤの歯面を境に、モータ側と動輪側の動力伝達が切れているため、それぞれが独立して回転していることを暗示しているだ。 そして、このデータよりその時のそれぞれの摩擦トルクが推定されるのである。 さらに、動力伝達が切れているので、摩擦抵抗の抗力項はゼロと考えれば、摩擦抵抗の速度項の示唆しているのである。
◆ ウォーム軸と動輪軸の摩擦トルクの速度項の推定
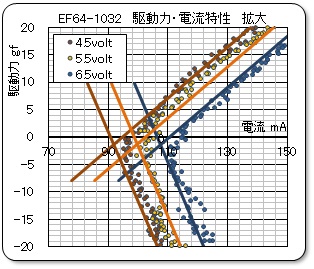
上記の考察より、牽引力特性データより、摩擦トルクの速度項に算出した。 まず、下記のグラフに示す様に、各パラメータ毎に最低電流値を境として左右に分割表示して、それぞれの直線近似式を求める。 ウォームギヤの接触点にちなみ、右側が表歯面、左側を裏歯面と呼ぶことにしよう。
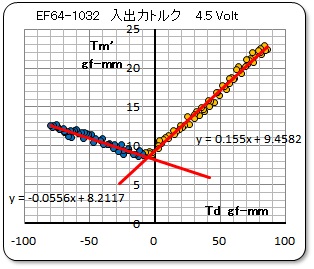
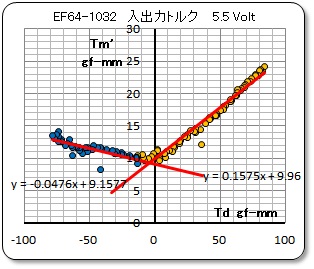
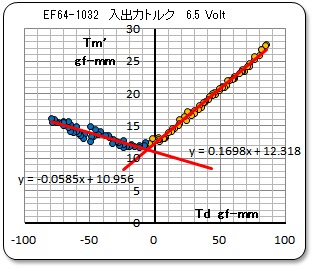
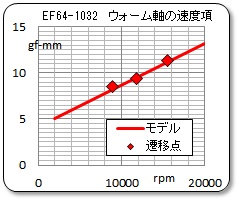
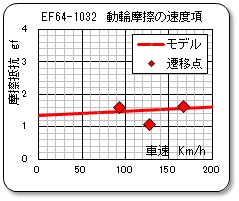
この表歯面と裏歯面の近似直線の交点が遷移点であるので、この点の入力側トルク Tm' がウォーム軸の摩擦トルクを示し、出力側トルク Td が動輪軸側の摩擦トルクである。 表歯面と裏歯面との境であるので、抗力項はゼロ、即ち速度項を示唆しているのである。
各パラメータ毎にこれらのトルクを算出し、その近辺の測定データよりウォーム軸回転数と車速を求めてグラフにプロットしたのが右のグラフである。 モデルと示した直線は、速度項の比例定数と固定定数を、遷移点に近づくように探ったものである。 遷移点のデータが多数あればその確からしさが向上するはずである・・・・・・・・。
さらに、下に示すプロセスを経て、摩擦損失トルクの速度項の定数を推定した。
◆ 抗力項の推定
この動力機構の入力トルクである Tm' と、出力トルクである Td のグラフを下に示す。 このデータより、上記で求めた速度項を差し引いたトルク t1 と t2 を計算したものを下右に示す。 折れ曲がり点、即ち遷移点が原点近くに寄ってきているのが分かる。
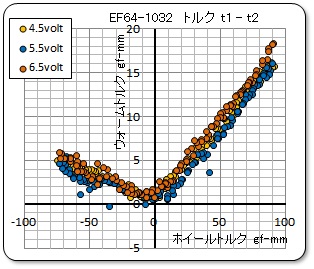
このデータより、抗力項の摩擦損失トルク Tk を求めたものを下左のグラフに示す。 さらに表歯面と裏歯面に分類してその近似式を求めた。
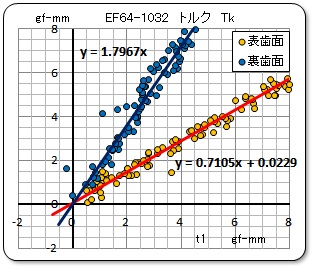
裏歯面の近似式のY切片は 0.0 を指定している。 この直線近似式より、抗力項の比例定数と固定定数を求めた。
◆ スリップ率のモデル式を求める
スリップ率の測定データの上にモデルの計算データを重ねて、プロット点が合致するように定数を探った。 その結果をグラフに示す。
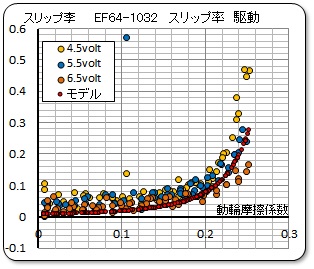
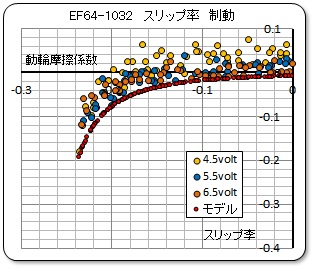
測定プロット点が全体的にプラス側にスレているのが分かるが、初めてスリップ率を測定したデータなので測定方法の限界ではないかとと判断してあえて補正はしていないが、パターンとしては合致するように定数を探っている。 報告書「スリップ率の実体を捕える」(2014/12/8)を参照ください。
◆ モデル式の定数
こうして求めた定数を一覧表示示す。
| 寸法関係 | 動輪直径 D | 7.4 mm | 全減速ギヤ比 i | 19.0 | ウォームのピッチ円 d1 | - | リード L | 1.257 mm | |
|---|---|---|---|---|---|---|---|---|---|
| 動輪荷重 Wo | 91.7 gf | 動輪系減速ギヤ比 i0 | 1.0 | ホイールギヤのピッチ円 d2 | 7.4 mm | ウォームリード角 tanβ | - | ||
| モータ関係 | ke ( volt/rpm ) | 0.000273 | Ra ( Ω ) | 14.4 | Eb ( volt ) | 0.17 volt | 電圧降下 | 0.78volt | |
| Kt ( gf-mm/A ) | 275.7 | Rm ( gf-mm ) | 15.8 | λm ( gf-mm/rpm ) | 0.0002117 | ||||
| 損失関係 | ウォーク軸速度係数 λw | 0.00045 | ウォーム軸固定項 Rw | 4.2 gf-mm | 表歯面抗力係数 λk | 0.709 | 表歯面抗力固定項 Rk | -0.03 | |
| 動輪軸速度係数 λd | 0.001 gf | 動輪軸固定項 Rd | 5 gf-mm | 裏歯面抗力係数 λk | 1.8 | 裏歯面抗力固定項 Rk | 0.0 | ||
| スリップ率 | 駆動 | k | -0.00025 | p | 0.35 | q | 0 | a | 0 |
| 制動 | k | 0.0008 | p | 0.30 | q | 0 | a | 0 | |
尚、スリップ李モデルのn の項は駆動が 3 で、制動が 2 としている。
◆ 測定データとモデル式のマッチング具合の検証
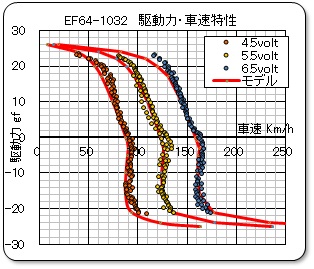
上記の定数を使って計算した結果と測定データを同じグラフに示して、そのマッチング具合をチェックした。
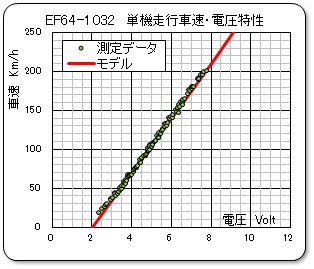
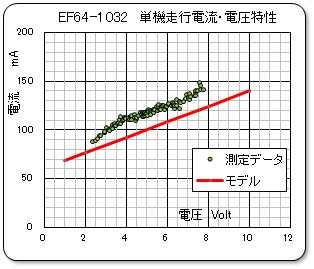
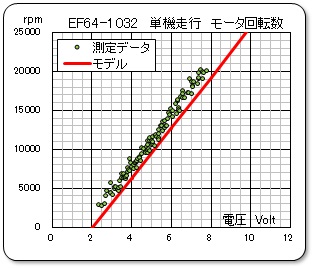
単機走行時の電流値とモータ回転数にズレが生じているが、モータ回転数などの測定方法にも問題があったかも知れない。 他のグラフのマッチング具合は問題無いレベルと思われる。
■ 考察
動力機構の特性を表示する計算式とその定数が明らかとなったので、これらの定数から何が言えるのか、この車両個体の特徴は何か、どこが問題なのか、どの部分を変えるとどの特性が変化するのか、等々の検討が可能となるのだが、これらの検討項目がまだはっきりしていないのである。 個体毎のデータ数がもっとたくさん必要なのである。 とりあえず摩擦損失の内容について分析してみた。
◆ 全体の摩擦損失の内容
全体の摩擦損失の内容をグラフ化してみた。 下のグラフ。 グラフの見方については、「抗力係数に注目して解析する」を参照してください。 駆動力と電流値のグラフにはモータ自身を回すための電流値を追加した。
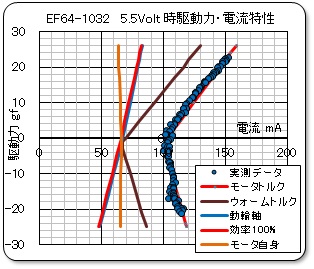
この動力伝達機構の摩擦損失は抗力項よりも、入力軸側の速度項の摩擦損失が大きい事がわかる。 これは、入力軸周りの構造が影響していると思われる。
2018/8/30 作成