
HOME >> 動力車の調査 > モータの特性調査 > モータの特性解析 出力特性を比較する
モータの特性解析出力特性を比較する
■ はじめに
Nゲージ鉄道模型に搭載されている色々なモータについて、その特性測定を実施してきた。 そしてモデル化手法を使って、モータを構成する6個の定数を推定することも出来た。 そこで、これらの定数データを比較して、各モデルの違いなどを検討してきた。 でも、Bトレ用モータのデータを追加してみて、なんだかスッキリしない、もやもやしたものを感じていた。 それは、Bトレ用モータの特徴は何だろうか? 単に定数だけを比較していても小型であることが浮かび上がってこないのである。
比較方法が不十分であると考え、モータの出力に注目して比較してみることにした。
 .
.
■ モータの特性線図
DCモータの特性線図は右に示すように表示されるので一般的である。 そこで、これに従って表示することにしよう。 この線図は、今まで使用して来た線図と違って、縦軸と横軸が逆になっているのである。
まず、グラフを作成するためには、無負荷時の回転数と電流値が必要である。 そして、拘束トルクと拘束電流値も必要となってくる。 そして、電圧をどのように設定するのかも決めて置く必要があるのだ。
モータの 定格 とは曖昧模糊として理解し難いが、連続定格とか3分定格とかの意味するところから、使い方によって最適な仕様を決めるための基準と考えている。 鉄道模型の場合は、3分間しか走行させては駄目ですと言われてしまっては商品にならないので、連続定格で設計されていると思われますが、果たして何ボルトまで持つように設計されているのだろうか?
定格はモータの発熱具合で決めるとのことですが、その発熱限界を測定せよと言われても・・・・・・・・・無理なのです。
そこで、カタログに示されている12ボルトを定格電圧(?)とするのも一つの考えですが、少し躊躇してしまいます。 比較する目的は? 実際の使用状態を想定し、測定データとしても裏付けのある 電圧=6ボルト を定格(?)として比較することにしました。 レイアウトを走行させる場合も、多くはコントローラのつまみを半部ぐらいの位置で使用して、スケールスピードで楽しんでいるものと判断しています。 実用的な使われ方は、電圧=6ボルトと勝手に決めることにしました。
モデル化手法を使って推定したモータを構成する6個の定数を使って、無負荷時の回転数と電流値、および拘束トルクと拘束電流値を計算する。 そして、この値を使用して、回転数、電流、出力トルクの線図を EXCEL にてグラフ化した。 対象としてモータのデータは、「モータの特性解析 まとめ 追加版2」で示した定数の推定値を使用した。 各グループは、グループ内の値の平均値を出してそれをグループの代表値としている。
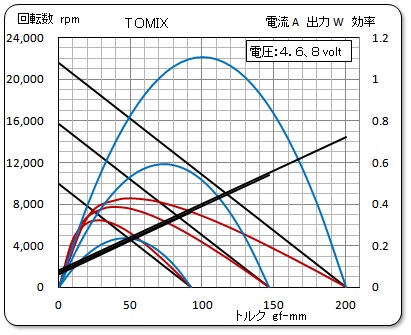
その結果を下に示す。
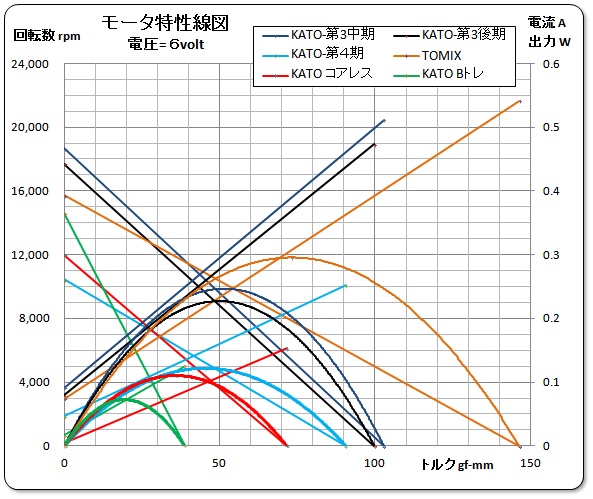
色々な線がゴチャゴチャして分かりずらいが、同じ電圧=6ボルトにおいては、TOMIX のモータの出力が一番大きく、Bトレ用モータが一番小さい事が分かる。 KATOの第4期のモータとコアレスモータはほぼ似通っており、意外とパワーは小さいのである。 コアレスモータは、第4期のモータと比べて電流値はかなり少ないにも拘わらず、同じ程度のパワーを出しているのは、コアレスモータの効率が高いということらしい。 赤線と青線の比較です。
モデルによって無負荷回転数はあまり変わらないのに、拘束トルクが大きく違っているのは、その分パワーも大きく出せるということなのだろうか。 拘束トルクは、
拘束トルク ≒ 電圧 × トルク定数 ÷ 巻線抵抗
で決まるので、TOMIXのモータは巻線抵抗が小さいためにパワーが出ているものと解釈する。 逆に考えると、同じ電圧の時に電流が流れやすいので、焼損しやすいのではとの危惧も考えられるが・・・・・・・・・。 このあたりが連続定格がどのあたりにあるのかとの問題であろう。
なお、上のグラフでは効率を計算していません。 理由は簡単な計算式ではないので計算がややこしいからです。 トルクの値をゼロと拘束トルクの間を10等分し、それぞれの回転数とトルクで出力を計算する一方で、電流値も計算して入力側の電力を計算して効率を計算します。 結果は非線形な曲線になるので、それをつなぐスムースな線をグラフ上に表示しました。
計算は、EXCELで計算フローを作って置き、そこに6個の定数をペーストするだけでグラフ表示できるようにしました。 その結果を下に示す。 モータのグループ毎に表示させたので、電圧パラメータを、4ボルト、6ボルト、8ボルトとして表示させており、効率は、赤線で示しています。
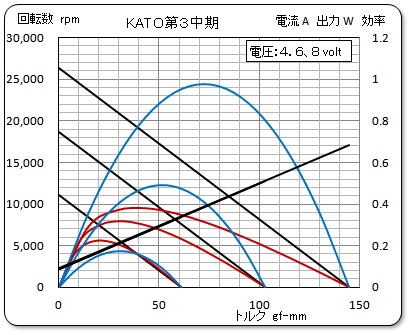
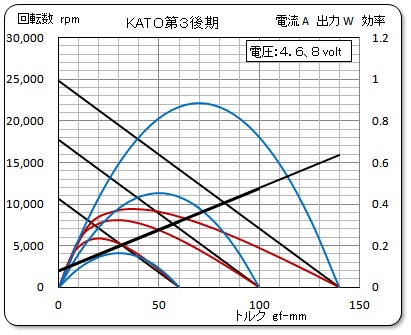
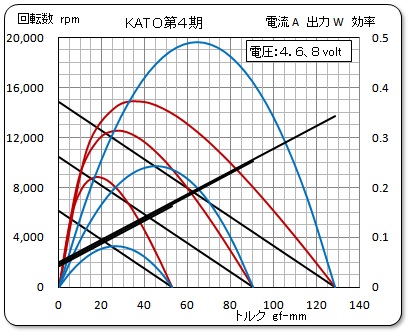
KATOの第4期については、値が小さかったためにグラフのスケールが違えてあります。 これらのモータの効率は 30〜40%であり、意外と悪いようですが、こんなものですかね。
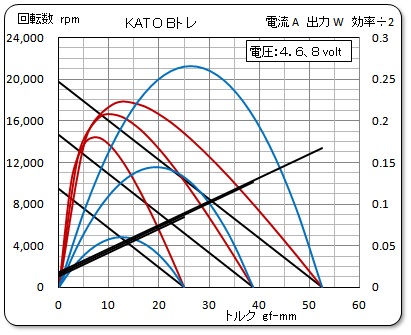
次に、コアレスモータとBトレ用モータを表示しますが、出力値が小さいために効率のデータと同じスケールで表示出来ませんでした。 右の縦軸は、電流、出力、および効率の3っつを表示させる必要があるのですが、スケールを変える方法が分からなかったので、データの方を細工しました。 効率のデータを半分にしてグラフ表示していますので、実際にはグラフの値の2倍です。
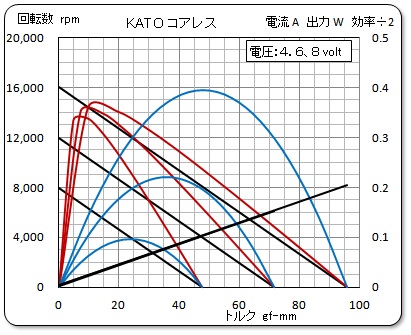
即ち、コアレスモータでの効率は、なんと約 70 %と高効率を示しています。
これにはビックリですね!
これは、回転子に鉄心がないため、磁気による吸引抵抗(?)が少なく、コイルを流れた電流による電磁気的トルクが有効に出力されているのではと視察しています。
一方のBトレ用モータは、小型ながらも鉄心があるため、他のモータと同様におよぞ40%前後ですね。
■ まとめ
モータの出力に注目すると、違いがはっきりとしてきました。 見た目の体格とイメージ的には合ってきましたね。
しかし、パワーの大きいモータを使用した模型車両がパワーフルとは限りません。 減速機構や動輪サイズによって、車両としての動力性能が違ってきます。 さらに重要なのは、動輪の摩擦力なのです。 いくら強力なトルクを動輪に伝えとしても、空転するようでは牽引力になりません。 これには、動輪に掛かる重さやトラクションタイヤなど摩擦係数の細工が必要なのです。 これらが適切にバランスよく設定されている模型車両が、良い車両と言えるでしょう。
なお、この動輪の空転は模型車両の安全弁と考えています。 モータを拘束状態で運転させると、入力された電力(電圧×電流)は熱としてモータの中に蓄積して行き、最後には煙を出して焼損してしまいます。 モータは回転させて仕事をさせるエネルギー変換装置なので、単なる熱発生そうちである電熱器ではありません。 この拘束状態を避ける仕組みが、動輪を空転させる方法と思っています。 すなわち、モータの安全弁なのです。
また、TOMIX のモータがパワフルだというので適当な車両に組み替えた時は、その連続定格状態を考えて置きましょう。 無理をしてモータを焼損させても、当方は責任を持ちませんのであしからず! メーカはその辺も充分考慮して設計されているはずです。