
HOME >> 動力車の調査 > KATO ED79-11 その1 その2
動力車の調査 KATO ED79-11 その2
■05 電気回路の電圧降下
電気回路の電圧降下について、有効な測定方法が見つからないので、車両特性の計算の中で、適切 に推定することにする。
■06 車両での速度特性の測定
走行特性を測定するにあたって、電気回路の電圧降下量の推定を少しでも信頼性が向上するように、ライト基板を取り去り、ダミーのプラ板に取り替えて測定を実施した。これによってライト基板への電流分離が無くなり、モータに流れる電流を供給電流と一対一に対応させて特性解析をより詳しく実施しようとするものである。
最初に、モータのウォームアップを兼ねて、速度と電流の時間変化も測定することにした。 条件は、重り車両を牽引した坂道路走行状態とし、70パーミルの勾配で牽引力が 15.4 グラムの登坂状態で速度と電流を測定した。 電圧は 4.0 Volt に設定している。 小判形の周回路のため、登りがあれば当然下りもあります。
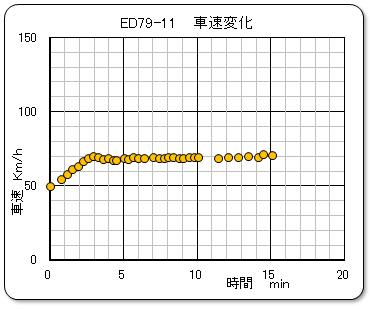
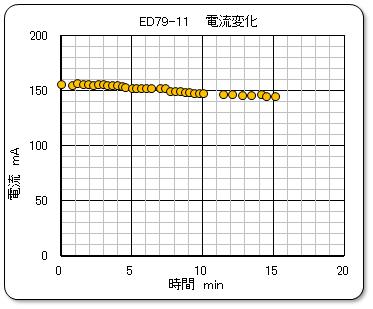
この車両は、速度や電流のバラツキが非常に少なく、かつ、早い段階で安定するようである。 スタートから速度が少し上昇すうが3分も経つと安定するが、モータが安定して回転しているためと思われる。
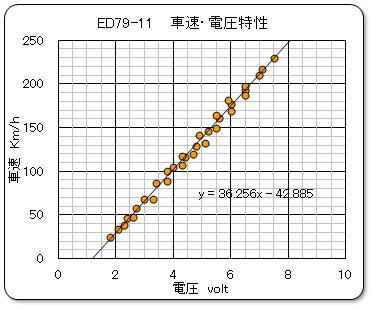
次に、平坦路単機走行での速度特性を測定したので下に示す。 今回は牽引力の測定の後に測定したので、モータは充分に温まっていると考えている。
 .
.
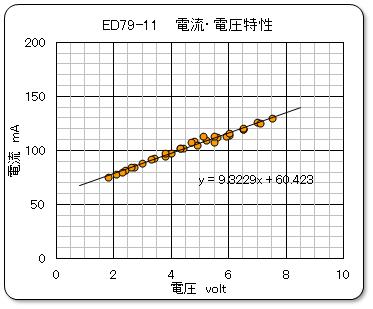
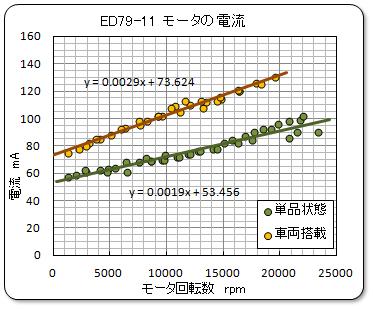
電流特性は殆んど直線的であるが、5volt付近で少し変形している。 そして、EF510-1で見られたモータ単品での電流特性と凸凹が逆になっている現象があるかどうかチェックしてみた。
そこで、横軸をモータの回転数に取って、車両状態と単品状態の電流値を比較したのが、右のグラフである。 車両でのモータ回転数は、車速から滑り率ゼロと仮定して逆算したものである。
そして、 4 volt (モータの回転数では、13,000 rpm )近辺の変形について、少しその傾向があるようであるが、もともと変形具合が小さいので良く解らない。
しかし、直線近似させてモデル化しても問題無いと判断出来る。
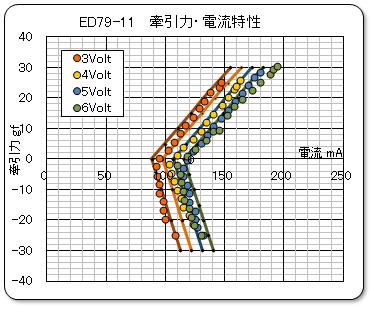
■07 牽引力特性の測定
次に、牽引力特性を下に示す。 パラメータとしての電圧設定は、設定値が±0.05 volt 以内を保つようにダイヤル調整を実施している。
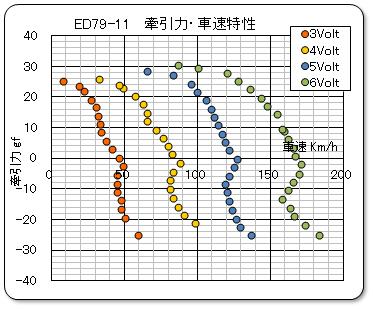
ライト基板の撤去や、より厳密な電圧設定により、整ったデータが得られる思っていたが、3Voltや4Voltのデータは、単機走行でのデータよりも遅くなっているが、バラつきであろうか。
■08 車両特性の解析
次に、計算モデルを活用して車両のいろいろな特性を解析してみよう。
1) 単機平坦路走行時の特性
伝達効率が100%と仮定した場合に車速を実測値と比較したものが、下の左のグラフである。 そして、電流値から推定したモータの出力トルクを伝達系の損失トルクと考え、それをグラフ化したので下の右のグラフである。
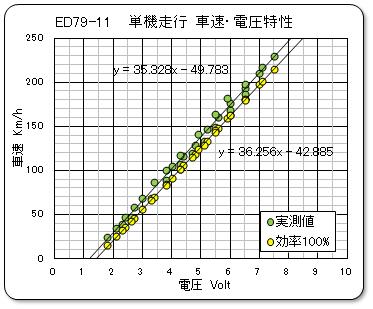
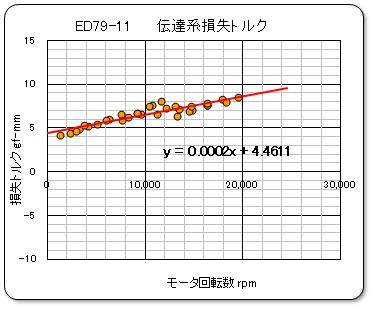
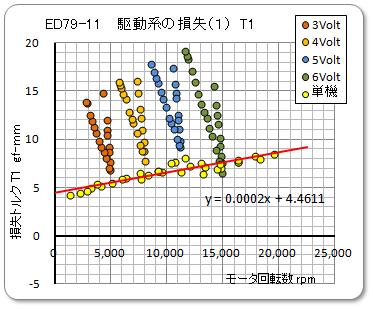
伝達系の損失トルクを示す右のグラフより、損失トルクは速度と比例する項を持っている事が判る。 そこでこのグラフの直線近似式より、速度項λd はλd = 0.0002 、そして固定項 R8 は、R8 = 4.5 と推定する。 そして、この損失トルクをもとに、単機走行状態を計算した結果を、実測値と重ねて表示したものを下のグラフに示す。
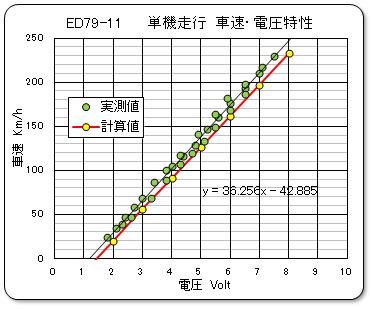
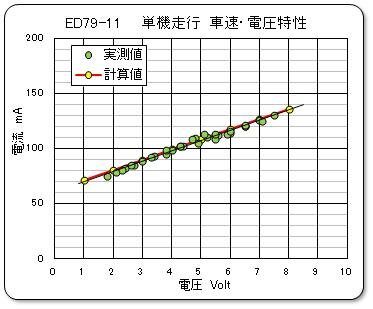
速度関係は、10 〜 20 Km/h 程度ズレているが、電流値は、ほぼ計算はマッチしていると判断出来る。 速度のズレは後に述べる電圧降下の値がミスマッチであると考えている。 この車両の速度項はプラスとなっており、理屈どうりなのが嬉しいですね。
2) 牽引力特性
次に、牽引力特性についても、効率100%の場合を計算し、伝達系の効率と速度差を下のグラフに示す。
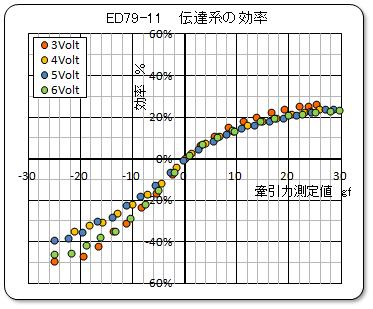
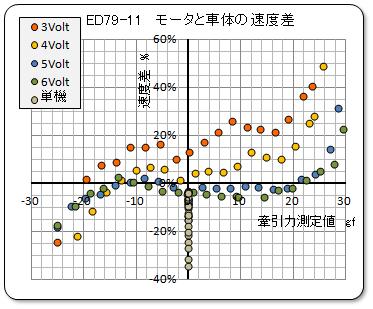
この効率のグラフについて、駆動側は勿論、制動側もそれらしき値を示していると判断出来そうである。 そして、この車両では、他の車両と同等な値を示している。 また、速度差のグラフについては、相変わらずバラバラのデータではあるが、やはり3Voltのデータは、疑問符の付くデータとなっている。
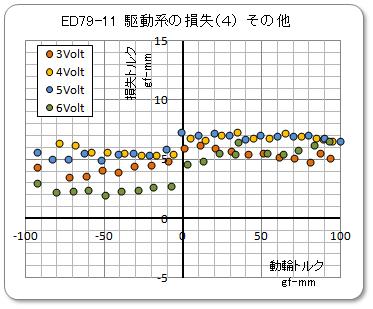
3) 駆動系損失の分析
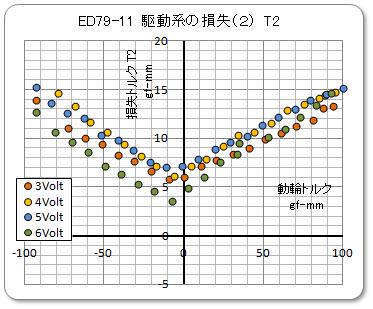
次に駆動系の損失トルクを推定する。 損失トルク T1 をウォーム軸の回転数、即ちモータ回転数を横軸にしてグラフ化したのが、下の左のグラフである。 そして、このT1 から速度項を差引いた T2 の値を動輪トルクを横軸にグラフ化したのが、下の右のグラフである。
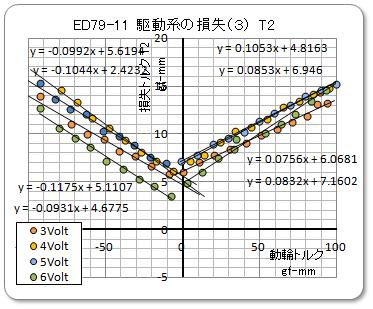
次に、T2 のデータより、左右の勾配を求めるため、グラフ表示をすこし細工する。 その結果を下の左のグラフに示す。 直線近似の勾配値を平均して、駆動時の抗力項の係数R7 は、R7 = 0.087 、制動時の抗力項の係数R7 は、R7 = -0.104 と推定出来る。 そして、このT2 より、今求めた抗力係数によって計算された抗力項を差しい引いた損失トルクを下の右のグラフに示す。
4) 損失トルクの内訳
上記の駆動系損失の分析で求めた各損失項を分かり良く表示するために、各電圧パラメータ毎にグラフ化する。 グラフの見方は「車両の静的特性のモデル化と特性解析」を参照下さい。
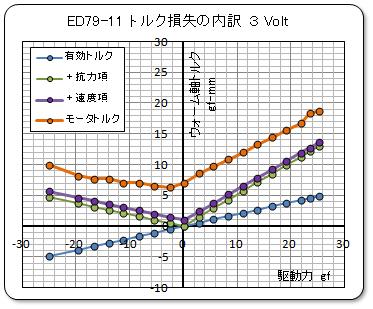
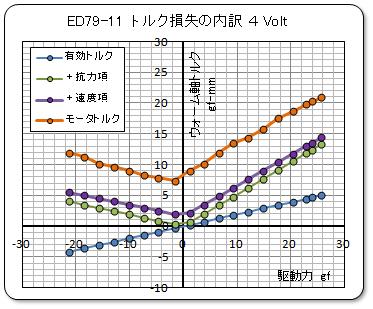
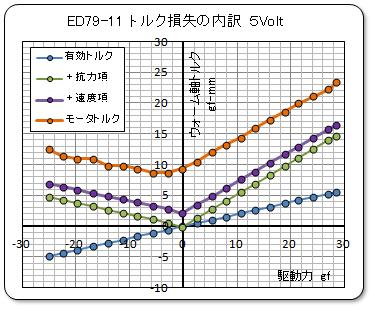
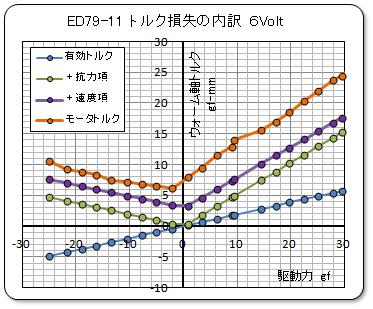
動力機構のトルク損失について、抗力項も影響もあるが、固定項の割合が意外と大きくなっている。 これはモータとウォームをジョイントを使わずに直接連結させている影響ではないだろうか。
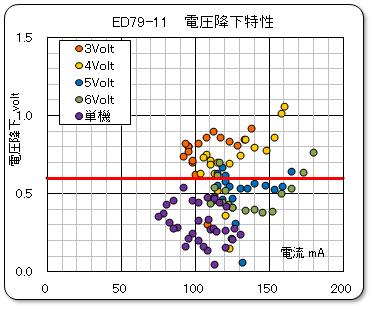
5) 電圧降下量の推定
次に、集電回路の電圧降下を推定してみよう。 車速や供給電流値から計算した電圧降下のグラフを下の左のグラフに示す。 今回の測定に際してはライト基板を取り去って測定しているため、電流値の値は供給電流の測定値そのままとなるため、データの信頼性はアップしたと考えていたが、思いのほかバラツイているし、なんらかの傾向はないのかな・・・・・・と見ているのだが、このグラフからは何も読み取れない。 そこで、エイヤーと引いた赤線を電圧降下の特性線図とし、R5 = 0.0、 R6 = 0.6 と推定したのである。 この強引な線引きによって実測値と計算値があちこちでアンマッチを起こしている。
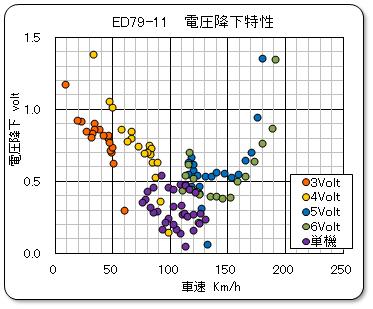
そこで、見方を変えて横軸を速度に取って見たのが右のグラフである。 データの両端はスリップ領域があるのでその点を除いて考えると、速度に関係して右下がりの傾向を示している様にも見える。 でも本当かなと疑問符が付く現象である。
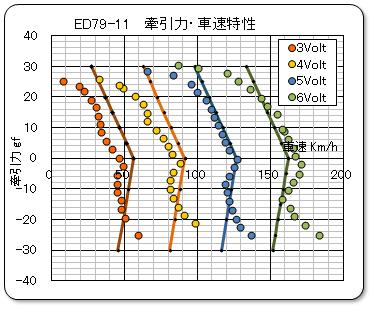
6) 牽引力特性の計算結果
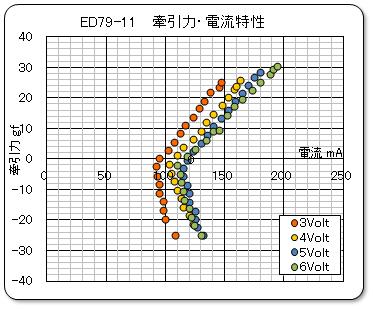
ここでは、推定した定数を使用し、モデル化したモータと車両の特性式のよって牽引力特性を計算し、測定データのグラフの上に重ねて表示する。 これにより、計算式と定数の確からしさを検証しようとするものである。
■09 まとめ
この車両の動力特性に関する諸元をまとめて一覧表に表示する。
| ED79形 交流直流電気機関車 | メーカー/品番 | KATO/3031 | 車両番号 | ED79-11 | 製造年 | 2007年 | ||
| 車体諸元 | 車両重量 | 79.4 | 前台車荷重 | 39.7 | 後台車荷重 | 39.7 |  |
|
| 台車中心間距離 | 55 | 台車軸距離 | 17.5 | |||||
| モータ諸元 定数 | モータ構造 | 2P5S、θ=0 | フライホイール諸元 | φ10.4*6.2-2 | マーキング | 青/白 | ||
| 逆起電力定数 Ke | 0.00028 | 巻線抵抗 Ra | 11.0 | ブラシ部電圧降下 Eb | 0.0 | |||
| トルク定数 Kt | 210 | 摩擦トルク Rm | 11.0 | 摩擦損失速度係数 λm | 0.0004 | |||
| 伝達機構 | ウォームモジュール m | 0.4 | ホイール歯数 Z | 19 | 動輪軸歯数 Z | 17 | ||
| ギヤ比 i | 19 | 動輪直径 D | φ7.4 | 車輪形状 | ローフランジ | |||
| 各種定数 | 電圧降下係数 R5 | 0.0 | 電圧降下係数 R6 | 0.6 | ライト基盤係数 R3 | 1.82 | ライト基盤係数 R4 | -3.25 |
| 速度係数λd | 0.0002 | 抗力係数駆動 R7 | 0.087 | 抗力係数制動 R7 | -0.104 | 固定項係数 R8 | 4.5 | |
| 基本単位 | 長さ mm、 重さ gf(グラム )、 回転数 rpm、 電圧 volt、 電流 A、 抵抗 Ω、 スケール速度 Km/h、 ただしグラフの電流値は mA で表示。 | |||||||
(注記) これらのデータは、ホビーとして個人が手持ちの車両を測定したものであり、その信頼性は保証いたしません。
このED形は、EF形に比べて車両長さが短くなっており、その中でのフライホイール搭載には、設計陣もいろいろ苦労されている様子であった。 機構的には少し無理があると思われるが、モータのパワーはそれを上回る力を有しているので、車両としては充分な性能を発揮している。