
HOME >> 動力車の調査 > KATO ED79-11 その1 その2
動力車の調査 KATO ED79-11 その1
動力車調査の第7弾として、KATOのED79-11を選び分解調査することにした。 このモデルはKATO 製電気機関車のフライホイール・シリーズの中で、車両長さが短いEDシリーズの一つであり、その構造上の工夫と性能特性を見ることにしよう。
■01 車両の概要
性能測定の前に、このモデルの概要と分解調査の結果を報告する。
 .
.
このモデルの詳細は、マイコレクションの ED79-11 を参照して下さい。 重複記載あり。
| メーカー | KATO | 商品名 | ED79 |
| 品番 | 3031 | 車両番号 | ED79-11 |
| 発売日 | 2007年5月 | 入手日 | 2010年2月25日 新品購入 |
模型車両の特徴: ・ヘッドライト点灯 ・フライホイール搭載動力ユニット ・ ローフランジ車輪 ・シースルー運転台 など。
◆構造を理解するために、車体を少しずつ分解していきましょう。

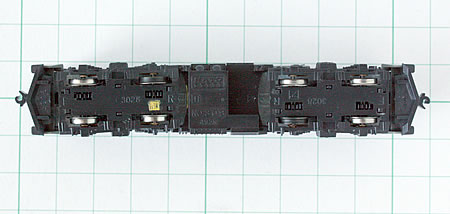
(注) 前方のフライホイールは、回転数測定のために、白色と黒色をマジックで塗ってあります。
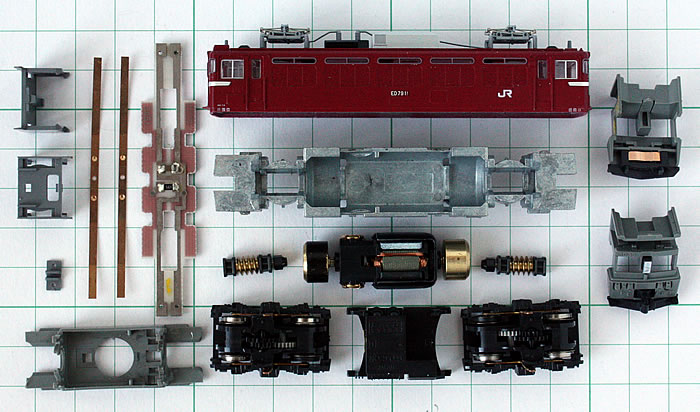
主な部品の分解状態を上の写真に示します。 まず、フレームを見て見よう。
 .
.
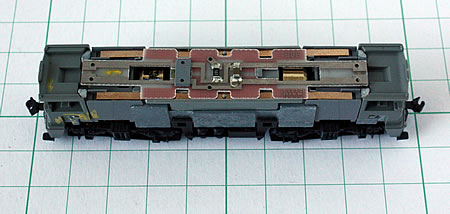
亜鉛ダイカスト製のフレームは一体的に作られているタイプであり、刻印された品番は 3028 であった。 この3028は、1999年に発売されたフライホイールタイプのED75 の品番であるが 、そのフレームと共通で使用していると言うことであろう。 また、珍しく1エンド側と2エンド側を示すと思われる1と2の数字も刻印されていた。 部品の組立てにおいて、あえて前方と後方を区別する必要があったと考えられる。
 .
.
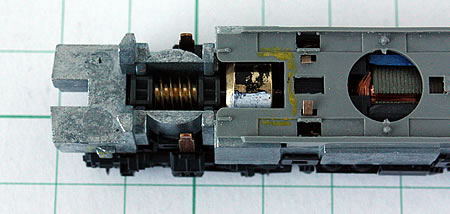
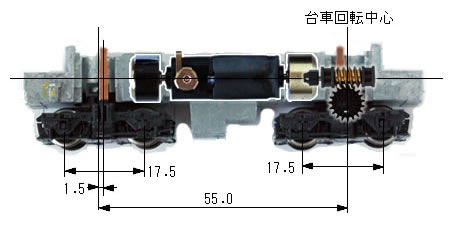
次に、モータとウォームを右の写真に示す。 フライホイール付きで、2ポール5スロットのスキュー無しマグネットモータである。 その寸法を下に示す。
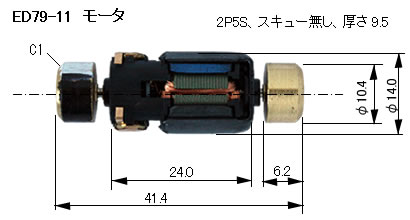
フライホイール搭載の標準型の車両に搭載されているモータと比較すると、モータ本体は同じ様である。 マグネットのマーキングは白と青が塗布されていた。 しかし、フライホイールは標準型より幅が 1.3mm 程狭く、さらに角部に大きな面取り(1mm)が実施されていた。 これは、短い車両長さに対応させるための工夫と思われる。 また、ウォームとの連結は、長さの必要なユニバーサルジョイントが使用出来ず、6角穴と6角軸を用いて、フライホイールとウォームを直接係合させる構造になっている。 これは、モータ軸とウォーム軸との軸芯のズレを吸収させるのは、ガタしかない事を意味し、その精度が要求されるのである。 測定してみると、6角穴の幅は 3.6mm 、6角軸は 3.4 mm で、その隙間はわずか 0.2mm であった。 この様な係合状態で1万や2万rpm の高速回転をさせると言うことは、感心するばかりである。 キチキチの精度で組み上げるよりも、ある程度のガタを設けるほうが意外とスムースに回転出来るものかも知れない。
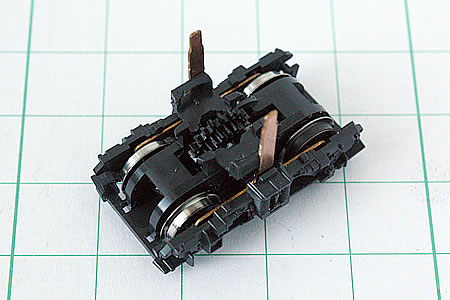
次に台車について上の写真に示す。 一瞬みたところ、今までの台車と同じと思ったが、アイドラギヤのひとつが灰色となっており、他方のアイドラギヤよりも少し大きいようであった。 そこで、よくよく見て見ると、その違いを見つけてしまった。
 .
.
二つの動輪の中心点と台車の回転芯軸がズレているのである。 模型の長さの制限により、台車の間隔を狭くしなければならないが、フライホイールモータを搭載する上で長さ方向の制約があり、設計陣が苦労したものと思われる。 台車中心間距離を長く取ってウォークギヤをより外側に配置し、さらにフライホイールの幅を狭することとの兼ね合いで、このサイズに仕上げたようである。 このため、専用部品が生じたようである。
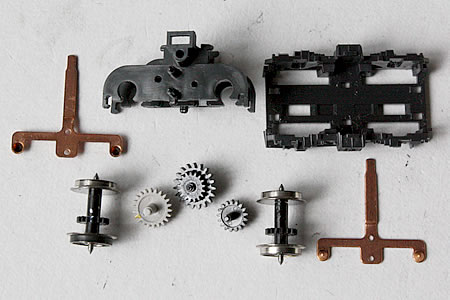
台車とその下のフレームは両方とも3023の刻印があり、灰色のアイドラギヤと共にこの車両用の専用部品と思われる。
歯車の構成は、ウォームは m = 0.4 の1条ネジで、ウォームと噛合うホイールは Z = 19 である。 このホイールは2段歯車となっており、アイドラギヤを介して動輪につながる歯は Z = 17 であるが m = 0.3 で作られているので外形はかなり小さくなっている。 そして、動輪の歯車は Z = 17 であるので、動輪とホイールの回転は同じとなり、動輪を1回転させるためにはウォームを19回回転させる必要があるので、減速ギヤ比は i = 19 のギヤ列を構成していることになる。 動輪の中心点と台車の回転芯軸がズレているので、ウォームホイールから動輪までの距離が前後で異なるようになってしまった。 このため、新たに灰色のアイドルギヤを新設してようである。、
動輪径は、φ7.4mm のローフランジタイプで、内側の片方の動輪にトラクション・ゴムを履いている。 その他の諸元として、車体重量は 79.4 グラム、前後の台車の動輪に掛る荷重はそれぞれ 39.7グラムであった。
■02 ライト基板の特性調査
まず、電気回路上、モータと並列に挿入されているライト基板の特性を調査しておこう。

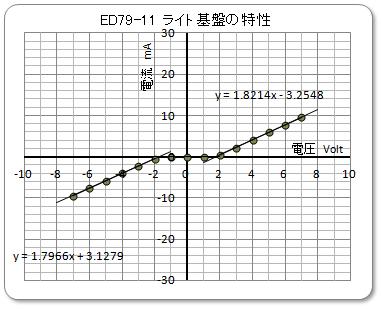
この基板は、裏表に回路が形成され、スルーホールを通して導通されている。 両端には前後のライト用のチップLED が半田付けされており、 このLED と直列にチップ抵抗も半田付けされている。 チップ抵抗の記号は 561 であった。
このスルーホール近くの導線部をクリップで挟み、電圧を掛けながら電流を測定したのが右上のグラフである。 2 Volt 近くになるとLED が光り出すと共に、電流は一直線状に上昇する。 極性を反転しても同様な傾向を示し、対称な特性であることが判る。 電流の上昇勾配は 1.81mA/Volt である事から、約552Ωとなり、チップ抵抗の実測値 560 Ωと合致する。
■03 モータ単品の速度特性とトルク特性の調査
馴らし運転を兼ねてモータ単品での時間変化を今回初めて測定した。 運転条件は、電圧は 4volt 一定にし、およそ17〜22 gf-mm の負荷を掛けて運転した。 負荷は負荷測定と同じ方法で付与させているが、糸とフライホイールの摩擦に頼っているため、途中での調整は不可能であった。 張力調整装置が必要かも。
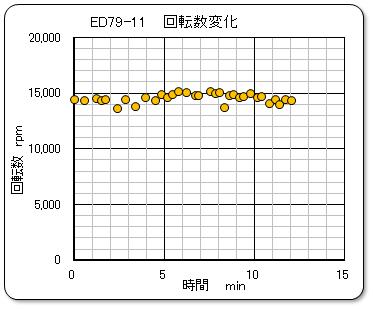
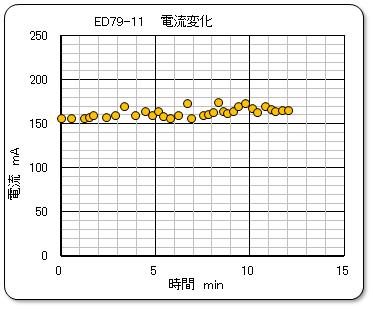
このモータは、回転数が突然ダウンする現象がたびたび発生した。 ダウンした後はすぐに徐々にではあるがもとの状態に戻る来るのである。 何か異物を噛んですぐに取れたような気配である。 上のデータでポツポツと飛び出した点がその状態を捕まえた時のデータである。 次に単品状態での速度と電流特性を測定する。 突然ダウンする現象時は避けて測定している。
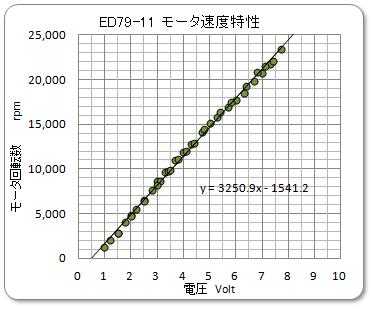
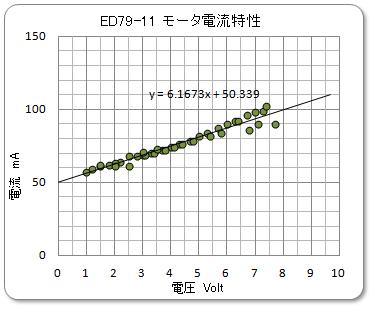
馴らし運転の効果によるものか(?)どうかは解らないが、データのバラツキは少ないようであるが、4volt を過ぎてからは、少しジーと言う異音を発生している。 これらのプロット点を直線近似させ、その直線とのズレを計算したものを下のグラフに示す。
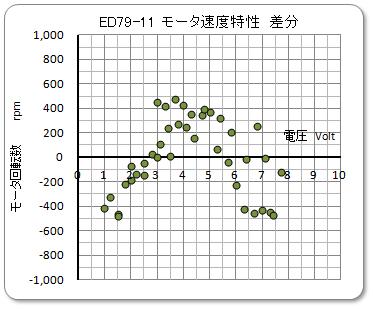
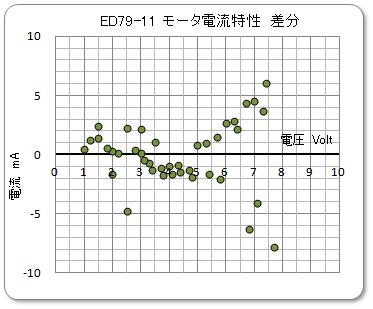
この近似直線との差分を見て見ると、やはり4〜5 volt 付近に何かが有る事が判る。 共振現象なのだろうか?
次に、負荷特性を測定した。
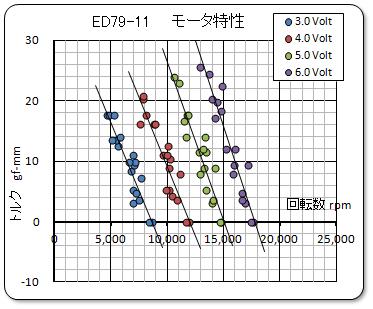
これらのデータからモータの特性を定める各定数を求める。
■04 モータモデルの定数の推定
モータモデルの各種定数の推定を整理した推定方法に従って計算を実施た。
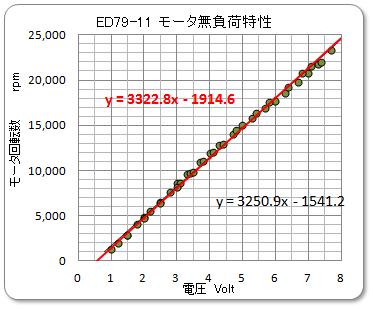
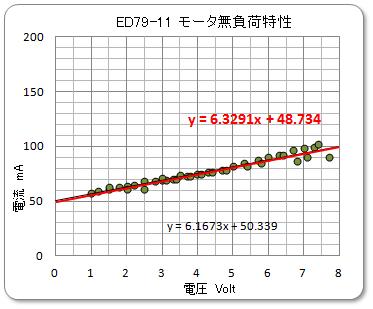
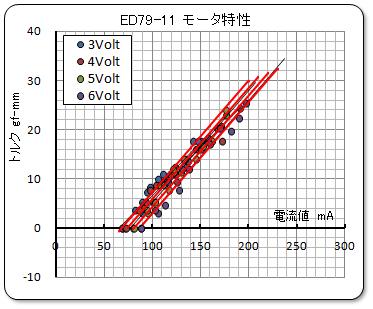
1) 電圧系定数の推定
まず、外部電圧、電流、回転数のデータより、Ke 、Ra 、Eb の定数を推定する。 負荷と無負荷状態の外部電圧、電流、回転数の全データより、下のグラフを作成する。
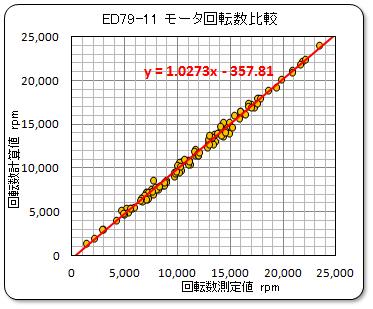
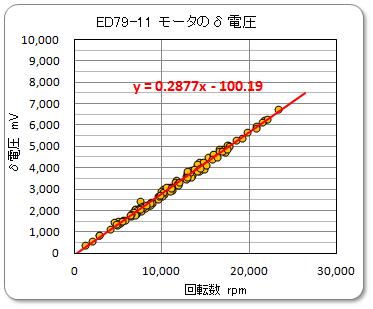
このグラフを参考にして推定した定数の数値は、 Ra = 11、Ke = 0.00028、Eb = 0.0 とした。
2) トルク系定数の推定
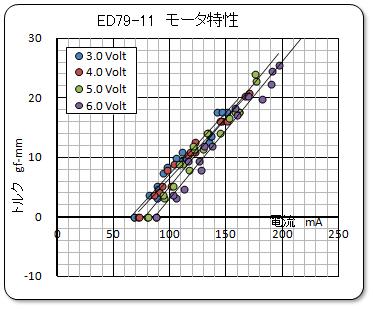
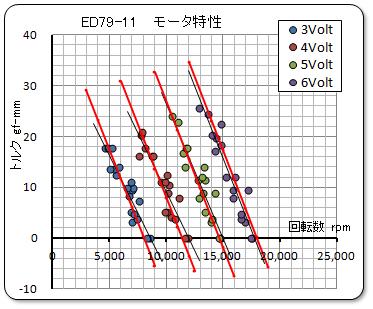
同様に、回転数 Nm 、電流 I 、出力トルクTm’のデータより、Kt 、Rm 、λm の定数を推定する。 負荷と無負荷状態の外部電圧、電流、回転数の全データより、下の二つのグラフを作成する。
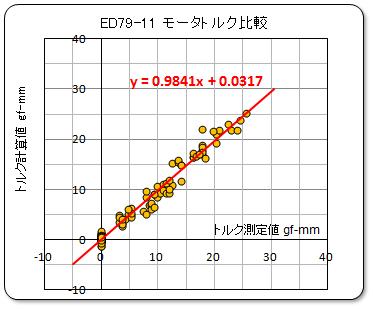
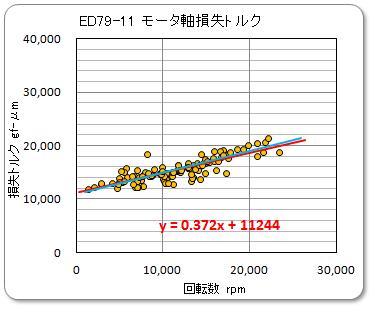
このグラフを参考にし、他の項目を見ながら最適値を探し、 Kt = 210、Rm = 11、λm = 0.0004 と推定した。 この時の値を右のグラフ上の青い線で示す。
3) 無負荷特性とモータ特性のマッチング具合
実測データのグラフの上に、推定した定数を用いて計算したデータを赤線で示し、推定した定数のマッチング具合を検証する。
このモータ特性は、実測値と計算値は良く合致しており、モータのモデルとしては充分に活用出来ると言える。