
HOME >> 動力車の調査 > KATO EF64-1032 その1 その2
動力車の調査 KATO EF64-1032 その2
モータ単品での調査に引き続き、車両特性の調査を実施し、伝達系の効率を求める。
 .
.
■05 電気回路の電圧降下
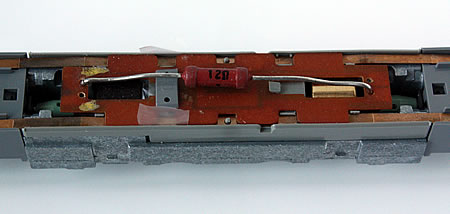
電気回路の電圧降下について調査する。 レールから供給され電気は、モータ端子までの間で、車輪部分や各接触部で電圧降下が発生するので、モータ端子に掛る電圧をなるべく正確に推定しておきたい。 しかし、接触抵抗は不安定でバラツキが大きく、苦労している。 今回は、モータの代わりに12Ωの固定抵抗を接続し、レール上を転がしながら抵抗を測定してみることにした。
基板は、LEDが劣化して点灯しなくなった古い製品のライト基板を使用し、そこに、12Ω、1/4Wの抵抗を右の写真のように装着して組立てた。 この時の測定装置を下の写真にしめす。
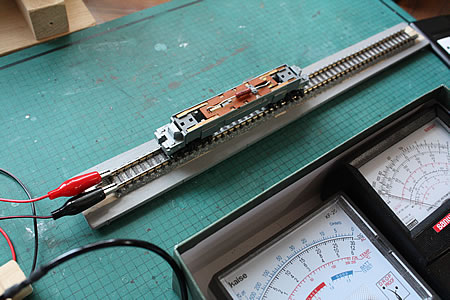
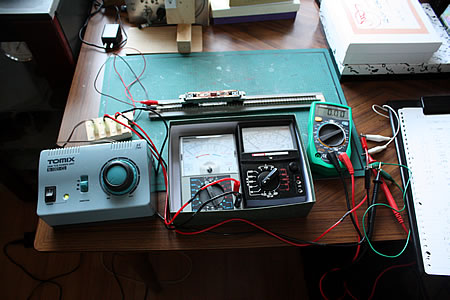
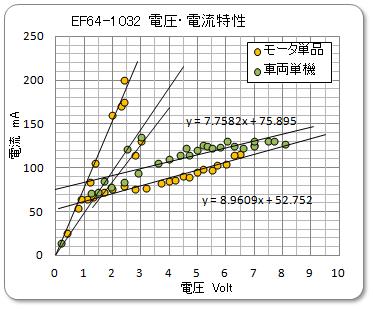
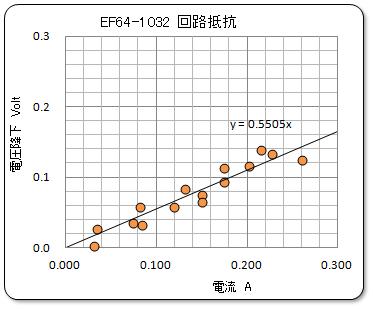 電圧は、精度良く測定する必要があったので、デジタル式のテスターを使用し、電流が 250mA 程度まで上げてその時の電圧と電流を測定した。 その結果を右のグラフにしめす。
電圧は、精度良く測定する必要があったので、デジタル式のテスターを使用し、電流が 250mA 程度まで上げてその時の電圧と電流を測定した。 その結果を右のグラフにしめす。
近似直線の勾配値の精度を上げるため、縦軸と横軸の数値の桁が揃うように電流はA の単位で表示させた。 データは比較的安定しており、目的を達成出来たと思っていたが、電圧降下量が思っていたよりも少ないのが気になっている。
なお、測定中は1/4Wの抵抗と言えども、手では触れないほど熱くなっていた。
でも、この方式は結果的にNGとなってしまった。 その理由は、後で述べる。
■06 車両での速度特性と牽引力特性の調査
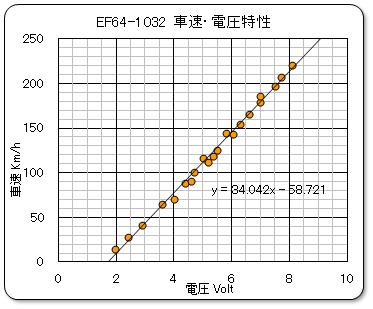
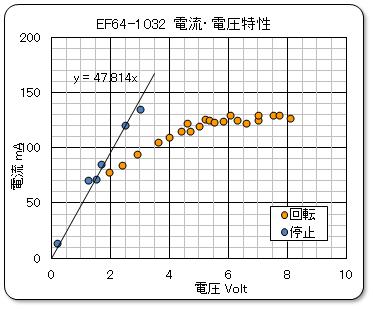
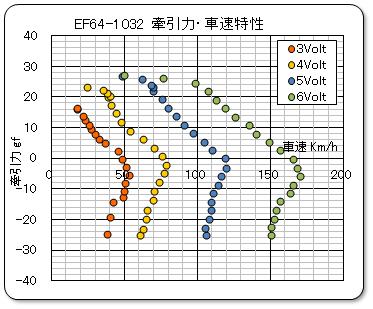
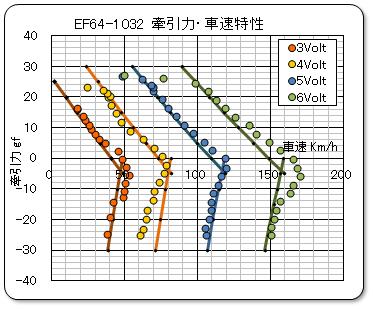
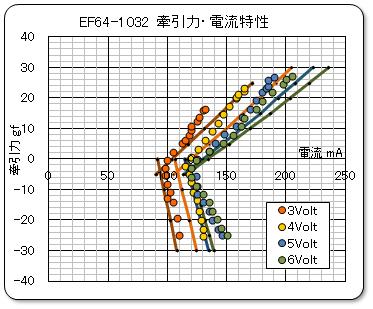
車両を再組付けして、その速度特性と牽引力特性を測定する。 この車両について、以前の測定データをマイコレクションのEF64-1032 のページにも記載しているが、今回のちょうさでは、全て新しく測定しなおすことにした。 測定装置は何時ものように傾斜台方式を使用している。 また、牽引力特性の測定時には、パワーユニットのダイヤルは中間域でほぼ表示の電圧になるように設定し、上り坂や下り坂での電圧変動は修正せずに連続して測定している。 これは、モータ単品での測定の場合と違って、データのバラツキを少しでも押さえて、データの連続性を重視したためである。 これらの測定結果を下のグラフに示す。
 .
.
パラメータとしての電圧は、厳密には表示通りではないのだが、3Volt だけが少しズレている様な気がして、気持ちの悪いのだが・・・・・・・・・・・。 また、単機走行時の電流が途中からなだらかになっているのも気になっている。
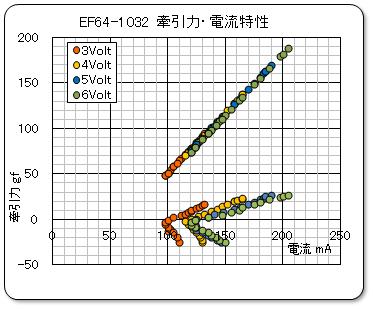
また、先回のような失敗が無いかどうか確認のために、モータ単品と車両単機走行の場合の電圧・電流のグラフを重ねて見たので右のグラフである。 今回は車両組付け状態にて電流値がアップしており、問題なさそうである。 しかし、5Volt 以上でその差が狭まっているのは何故だろう。
■07 車両特性計算への挑戦
モータのモデル化には目途が付きつつので、今度は車両特性も考えて見ることにした。 計算式は、モータの端子電圧とモータに流れる電流値より、モータの回転数と出力トルクを求め、ギヤ比と動輪径より、車速と牽引力を求めるものである。
モータに流れる電流は、供給された電流からライト基板に流れる電流を差引いて推定し、モータ端子電圧は、電流値から■05 で求めた電圧降下を差し引いている。
上記の測定データを整理し、今まで求めてきた計算式をもとにしてEXCEL 上で車速と牽引力を計算するシートを作成し、計算結果をグラフの一覧表にして、測定値と計算値の合致具合を見て行くことにした。 モータの変数は、前の章で求めた定数を使用し、同じ式を使用して計算している。
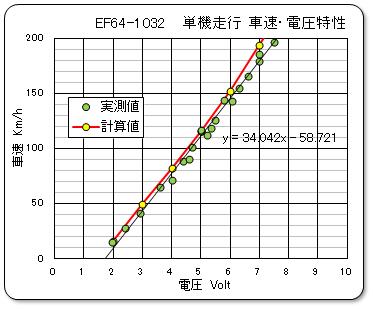
1) 単機走行時の特性
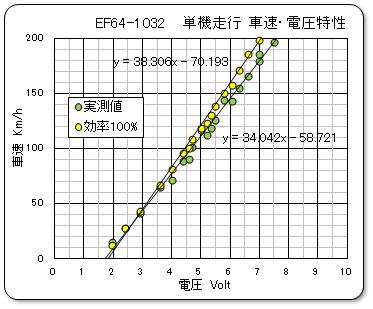
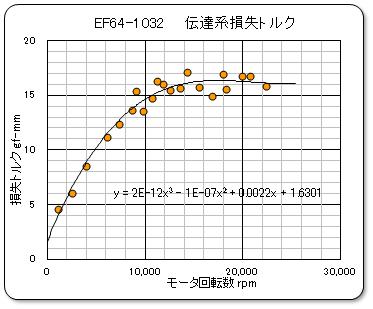
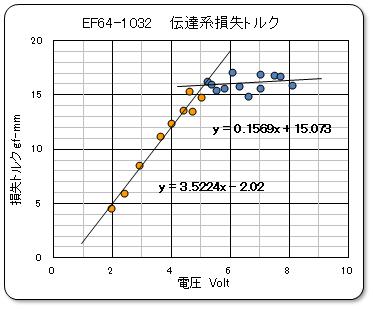
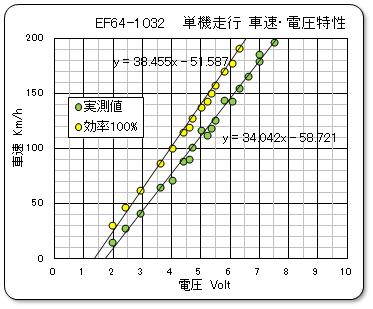
伝達効率が100%と仮定した場合に車速を実測値と比較したものが、左のグラフである。 モータの回転と車速の関係は、伝達効率に関係なく厳密に1:1であるはずである。 この違いは、車輪のスリップとも考えれれるが無負荷走行の場合では考え難い。 一番の要因は、駆動系の摩擦抵抗と考えられる。 EF66-51でも述べた様に、電流値から推定したモータの出力トルクを伝達系の損失トルクと考え、それをグラフ化したので右のグラフである。 モータの回転数が1万回を過ぎるあたりから特性が変化しているのが不思議である。 右のグラフでは、3次の多項式で近似してみたが、同じデータを横軸を電圧に変更し、かつ、二つの直線で近似したものが左下のグラフである。 そして、この損失トルクをもとに、モータモデルで単機走行状態を計算した結果を下の右のグラフに示す。 最初のグラフよりも実測値に近づているし、ややカーブしているのも新鮮な発見である。 この走行特性は直線になるものとばかり思い込んでいたが、損失トルクの状態によっては非線形になると言えば当然かも知れない。
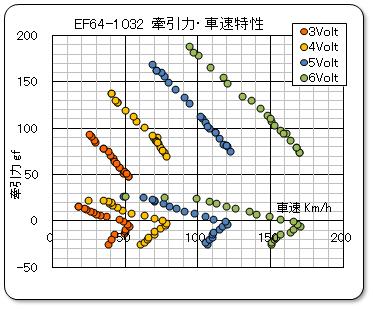
2) 牽引力特性
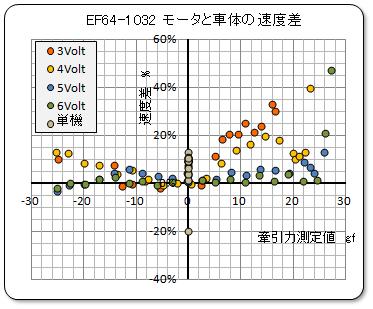
次に、牽引力特性についても、効率100%の計算結果をグラフ化した。 下に示すが、その実測値から1桁もかけ離れていることに注目しておこう。
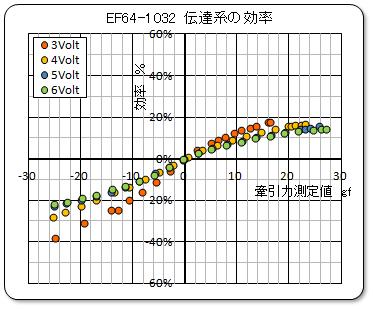
この効率100%計算結果を元に、伝達系の効率と速度差を下のグラフに示す。
なお、ここで電気回路の電圧降下量について、追加説明をしておく。 折角 ■05 にて電圧降下量を求め計算式まで設定したが、その式を使用した場合の計算結果を、単機走行時のデータと速度差のグラフで示すと下のグラフの様になる。
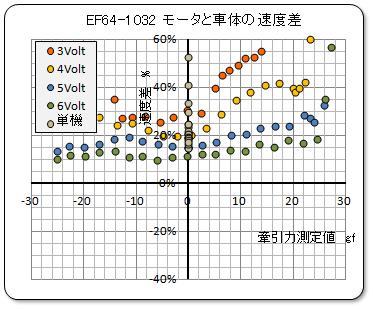
これは、明らかにミスマッチと判断し、この電圧降下量が大きく影響するこの二つのグラフを見ながら、式を探っていった。 その結果、
当初の式: Y = 0.0005505* I ⇒ 修正した式: Y = 0.001* I + 0.4
として、計算している。 苦労して改良したと思った方法が、全くのNGとなってしまったのである。 なお、計算の中の電流値の単位はmA を使用している。
 .
.
3)駆動系の損失とは
伝達系の効率が低いのは何故なのか、ふつふつと疑問が湧いてくる。 モータの計算モデルに少しは自信が出てきたので、この伝達系の損失を解析することにした。
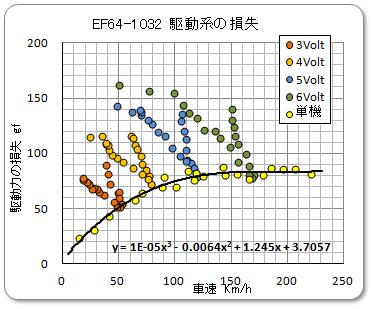
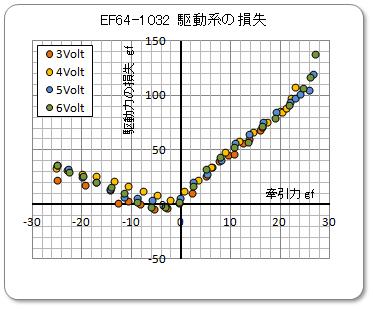
まず、電流値から計算されたモータの出力トルクを100%効率として計算された駆動力(先に記載もの)と実際の駆動力の差を 「駆動系の損失」 として、車速度を横軸にグラフ化したものが、右のグラフである。 さらに、ふと気が付いて、単機走行状態のデータもグラフに追加してみた。 また、ここでは駆動力あるいは制動力と言った方がぴったりであるので言いかえることにする。 そして、制動状態に於いて、制動力はマイナスの駆動力として、駆動状態と同じ計算式を当てはめている。
このグラフを見ていると、駆動あるいは制動状態は、単機の無負荷状態のデータに接している事が分かる。 これは考えてみれば当然であり、駆動力あるいは制動力がゼロの場合が単機走行状態なのであるのだから。 そこで、もし、この単機走行時の損失を、駆動力や制動力に関係しないで、ただ単に速度のみに影響する損失項と考えると、どうだろうかと気が付いた。 残りの損失量は、作用している力に比例する損失項ではないだろうか? 即ち、摩擦の発生原理と同じ考えが浮かんできた。
そこで、この単機走行での損失項を差引いた量を、実測した牽引力を横軸にしてプロットしたのが、下のグラフである。
なんと、電圧のパラメータに影響なく、一直線に乗っかてしまうではないか!
大発見?!
このことは、駆動系の損失抵抗は、速度に影響される項と力に影響される項が分離出来、
それぞれ、速度と牽引力から計算出来る事を示しているのではないか。
そして、データは速度に影響される項が意外と大きい事も示している。
速度に影響される項については先のグラフより、単機走行の場合のプロット点(黄色の丸)に近似曲線を当てはめて、数式化する。 1)では、二つの直線で近似させたが、場合分けが面倒なので、3次の多項式で近似させた。 その式はEXCELが計算してくれており、車速(スケール速度)をV Km/h 、 損失駆動力(駆動力換算)を Fv グラムとすると、
Fv = V^3/100,000 - 0.0064*V^2 + 1.245*V + 3.7057
であることを示している。
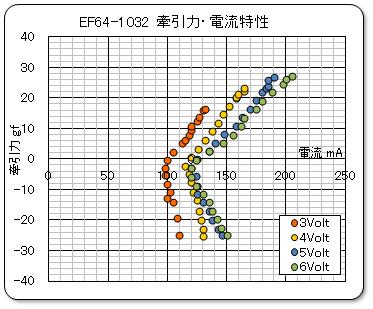
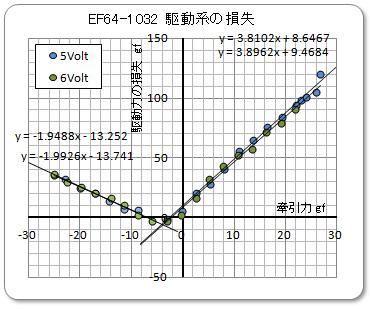
また、 力に影響される項は上のグラフからデータの安定している 5Voltと 6Volt のデータより、駆動側と制動側の近似直線を求めるたのが右のグラフである。 ここでウォームギヤに掛る力の形態が変化する遷移点を境として、綺麗な直線を示している。 この遷移点は、およそ4グラムであることも納得である。 また、直線の勾配が異なっていることも興味深々である。 この 5Voltと 6Volt の直線のデータを平均して、損失駆動力(駆動力換算)を Ff グラムとすると、
駆動側: Ff = 3.8532* Fk + 9.0576 制動側: Ff = - 1.9707*Fk -13.497
で近似できる。 そして、駆動力の損失は、
駆動力の損失 = Fv + Ff
で計算することが出来る。
4)牽引力特性の計算結果
伝達系の損失量が計算出来ることが分かったので、モータのモデルと合わせて、車両の動力特性が計算できるはずである。 そこで今までの各種定数や損失データをもとに、牽引力特性を計算してみた。 その計算方法は、多少の疑似逐次近似法などの手法を必要とするが、EXCELレベルで計算できるものである。 後日報告しよう。 ここでは、その計算結果を紹介する。 電圧をパラメータにして、牽引力を-30、-20、-10、-5、0、5、10、15、20、25、30などに設定して車速と電流値を計算し、測定データのグラフの上に重ねて表示したものを下に示す。
今回の計算では、ライト基板への電流バイパスを計算に含めなかった(忘れていた)が、実測データと計算値とが、概ね合致していると判断出来る。 満足!
■08 まとめ
動力車の調査も第4報となると、その解析手法も整理出来つつある。 今回は、駆動系の損失内容まで踏み込む事が出来た。 現在は、構造がシンプルで分解組付けも容易な電気機関車を主体にして調査を進めている。 同じ構造の車両にてN増しを行い、解析手法の確立とデータの信頼性を上げ、その後、他社メーカ品や蒸気機関車、あるいは電車などの調査に手を伸ばしたいが、手間暇がかかるので何時になることやら・・・・・・・・。