
HOME >> 動力車の調査 > KATO EF64-1032 その1 その2
動力車の調査 KATO EF64-1032 その2 修正版
モータ単品での調査に引き続き、車両特性の調査を実施し、伝達系の効率を求める。
.
■05 電気回路の電圧降下
電気回路の電圧降下について、モータの代わりに12Ωの固定抵抗を接続してレール上を転がしながら抵抗を測定してみたが、推定計算との違いが大きかったので不採用とした。 その代わりに車両特性の計算の中で、適切 に推定することにする。
■06 車両での速度特性と牽引力特性の調査
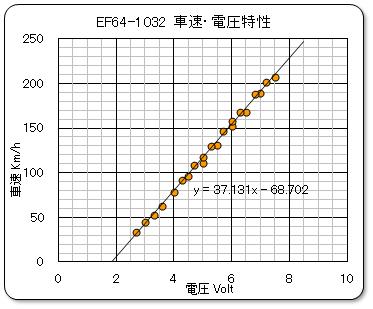
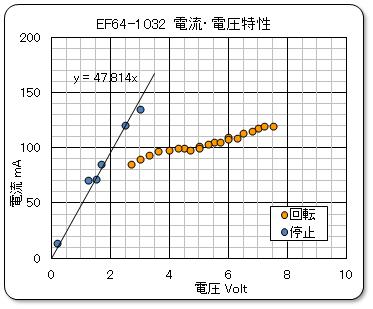
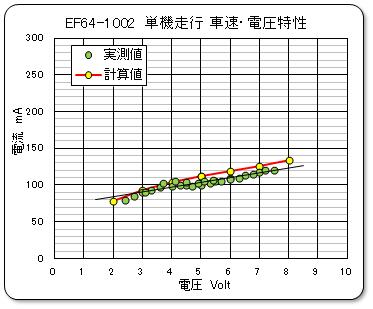
単機平坦路走行での速度特性について、他の測定例と比較するとこの車両だけ特異だったので再測定を実施した。 この再測定した結果を下に示す。 3〜6ボルト付近の電流値が前回の測定値よりも小さくなっており、他の車両と同等なレベルとなっている。 この方が正常ではないかと判断するが、これもモータの不安定性によるものだろうか。
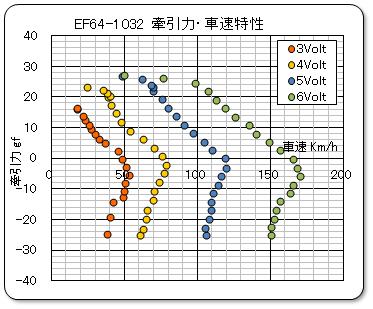
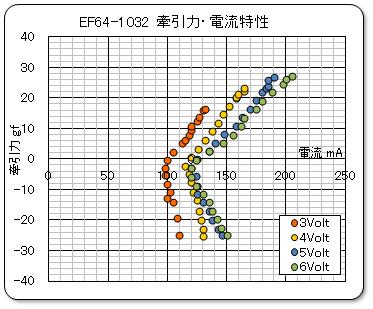
牽引力特性については、特に異常が認められないので、先回のデータを生かす事にした。
.
パラメータとしての電圧は、厳密には表示通りではないのだが、3Volt だけが少しズレている様な気がして、気持ちの悪いのだが・・・・・・・・・・・。
■07 車両特性の解析
計算モデルを活用して車両のいろいろな特性を解析する。
1) 単機平坦路走行時の特性
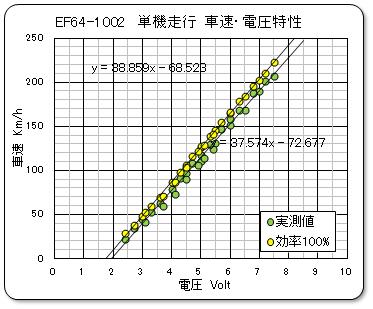
伝達効率が100%と仮定した場合に車速を実測値と比較したものが、下の左のグラフである。 電流値から推定したモータの出力トルクを伝達系の損失トルクと考え、それをグラフ化したので下の右のグラフである。 このグラフを見ると、先回の測定結果とは大きくかけ離れている事が判る。 先回は丘の様なパターンであったので3次の多項式で近似したが、今回は右下がりとなっているおり、直線近似が妥当のようである。 この違いの原因は良く分からない。
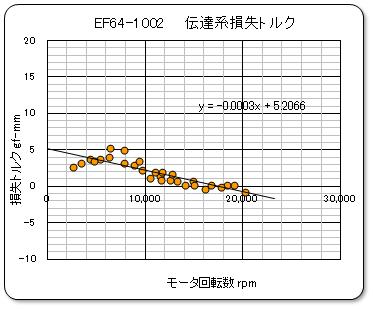
この右のグラフにおいて、直線近似した1次式の係数より、速度項λd は、λd = -0.0003 と推定出来る。
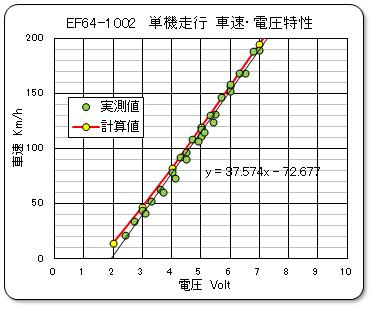
そして、この損失トルクをもとに、単機走行状態を計算した結果を、実測値と重ねて表示したものを下のグラフに示す。 ほぼ計算はマッチしていると判断出来る。
2) 牽引力特性
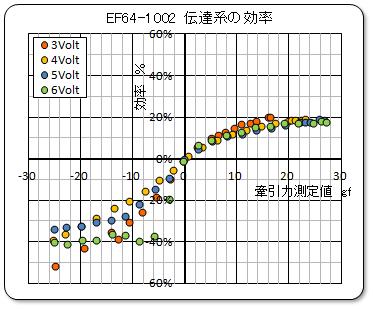
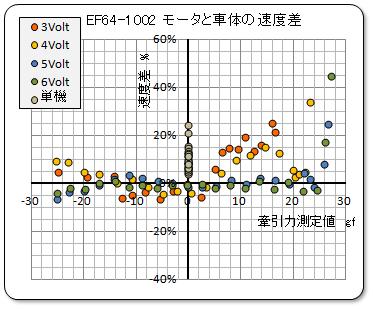
次に、牽引力特性についても、効率100%の場合を計算し、伝達系の効率と速度差を下のグラフに示す。
.
3) 駆動系損失の分析
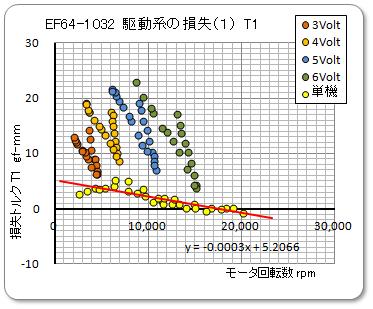
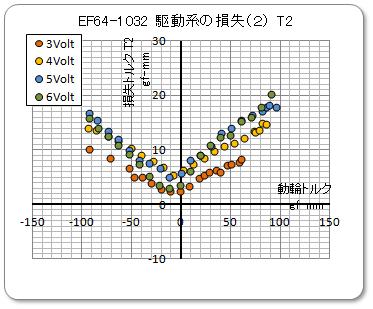
次に駆動系の損失トルクを推定する。 「車両の静的特性のモデル化と特性解析」にて説明したように、損失トルク T1 をウォーム軸の回転数、即ちモータ回転数を横軸にしてグラフ化したのが、下の左のグラフである。 そして、このT1 から速度項を差引いた T2 の値を動輪トルクを横軸にグラフ化したのが、下の右のグラフである。 このT1 のグラフを見ていると、単機走行時の測定データと牽引力測定時のデータの間が少し離れている点に注目する。 本来は、牽引力ゼロの点で単機走行時のデータとは交差しなければならないのに、離れていると言う事は、データがおかしいか、車両の状態が変化している事を示している。 この二つの測定は同時期に実施していないため、疑問のあるデータとなってしまった。
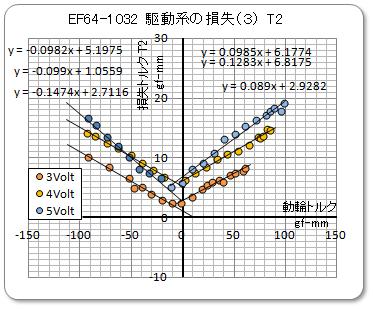
本来なら再測定しなければならないが、とりあえずこのままのデータで解析することにした。 T2のデータより、左右の勾配を求めるため、グラフ表示を細工する。
その結果を下の左のグラフに示す。 直線近似の勾配値を平均して、駆動時の抗力項の係数R7 は、R7 = 0.138 、制動時の抗力項の係数R7 は、R7 =- 0.123 と推定出来る。 そして、このT2 より、今求めた抗力係数によって計算された抗力項を差しい引いた損失トルクを下の右のグラフに示す。

この残った損失トルクには、固定的な摩擦トルクや誤差項などが含まれるが、駆動側と制動側の違いなど、興味あるところである。
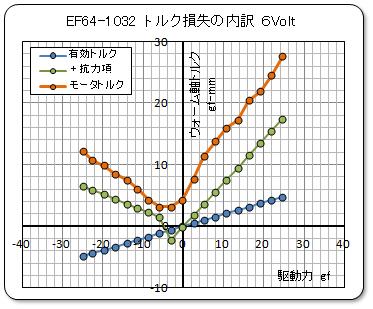
4) 損失トルクの内訳
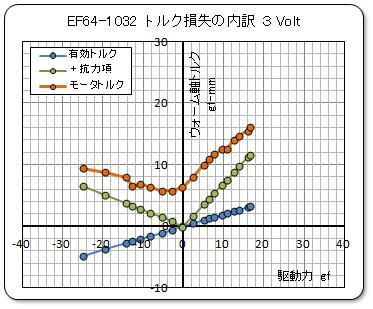
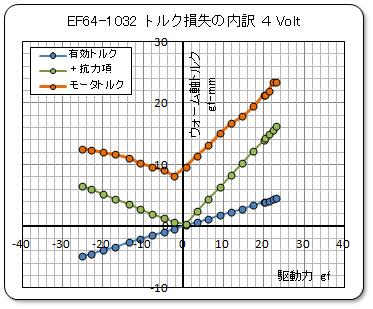
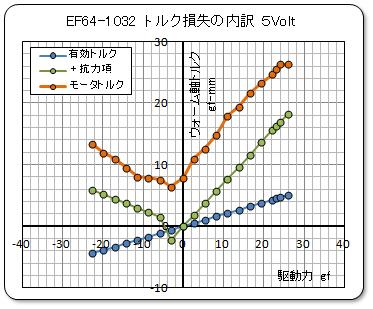
上記の駆動系損失の分析で求めた各損失項を分かり良く表示するために、各電圧パラメータ毎にグラフ化する。 グラフの見方は「車両の静的特性のモデル化と特性解析」を参照下さい。
 .
.
このグラフは、やや疑問のあるデータとなっているため、参考データとして見ておいて欲しい。
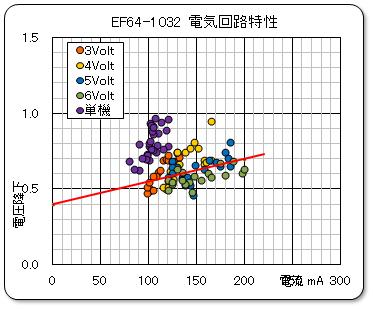
5) 電圧降下量の推定
次に、集電回路の電圧降下を推定してみよう。 車速や供給電流値から計算した電圧降下のグラフを右に示す。 スリップ率の大きいデータはネグレクトしているが、おおよそ0.5〜1.0ボルトの電圧降下が発生しているようであり、電流に対してやや右上がりの傾向が有る様である。 赤線は、エイヤーと引いた電圧降下の式であり、R5 = 0.0015、 R6 = 0.4 と推定している。
6) 牽引力特性の計算結果
ここでは、その計算結果を紹介する。 電圧をパラメータにして、牽引力を設定して車速と電流値を計算し、測定データのグラフの上に重ねて表示したものを下に示す。
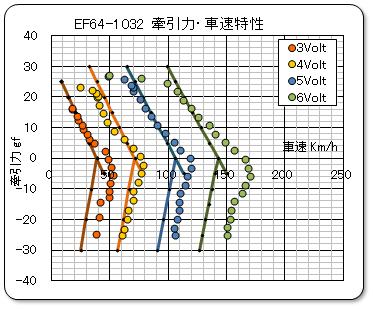
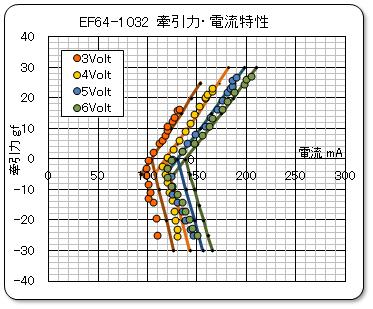
実測値と計算値はかなり合ってきたが、まだまだと考えている。 しかし、データの傾向は良く合っているので、計算モデル自体は間違ってはいないようである。
■08 まとめ
この車両の動力特性に関する諸元をまとめて一覧表に表示する。
| EF64形 直流電気機関車 | メーカー/品番 | KATO/3047 | 車両番号 | EF64-1032 | 製造年(再生産) | 2010年 | ||
| 車体諸元 | 車両重量 | 100.7 | 前台車荷重 | 44 | 後台車荷重 | 44 |  |
|
| 台車中心間距離 | 78 | 台車軸距離 | 17.5 | |||||
| モータ諸元 定数 | モータ構造 | 2P5S、θ=0 | フライホイール諸元 | φ10.4*7.5-2 | マーキング | 青/白 | ||
| 逆起電力定数 Ke | 0.0002633 | 巻線抵抗 Ra | 13.0 | ブラシ部電圧降下 Eb | 0.16 | |||
| トルク定数 Kt | 257 | 摩擦トルク Rm | 16.213 | 摩擦損失速度係数 λm | 0.0006406 | |||
| 伝達機構 | ウォームモジュール m | 0.4 | ホイール歯数 Z | 19 | 動輪軸歯数 Z | 17 | ||
| ギヤ比 i | 19.0 | 動輪直径 D | φ7.4 | 車輪形状 | ローフランジ | |||
| 各種定数 | 電圧降下係数 R5 | 0.0015 | 電圧降下係数 R6 | 0.4 | ライト基盤係数 R3 | 1.84 | ライト基盤係数 R4 | 3.3 |
| 速度係数λd | -0.0003 | 抗力係数駆動 R7 | 0.138 | 抗力係数制動 R7 | -0.123 | 固定項係数 R8 | 5.21 | |
| 基本単位 | 長さ mm、 重さ gf(グラム )、 回転数 rpm、 電圧 volt、 電流 A、 抵抗 Ω、 スケール速度 Km/h、 ただしグラフの電流値は mA で表示。 | |||||||
(注記) これらのデータは、ホビーとして個人が手持ちの車両を測定したものであり、その信頼性は保証いたしません。
動力車の調査とその解析手法は整理出来つつある。 今回は、一部再測定を実施したものの、以前のデータを用いて解析を実施した。 今後、他の車両も含めて整理していこうと思っている。