
HOME >> 鉄道模型工作室 > マイコン式の運転操作台を作ろう コアレスモータ車のレベル設定
鉄道模型工作室 マイコン式の運転操作台を作ろう コアレスモータ車のレベル設定
卓上レイアウトでも走行を楽しめる小型車両を中心にして、車種レベルの設定のために走行特性を測定した。 今回は、コアレスモータ車の場合を検討したが、やはり特性式は変更する必要があった。
■ コアレスモータ車の走行速度の測定
車種選択ダイヤルは、残されている二つのポジションを使って設定することにする。 まず、KATO製のコアレスモータを搭載したチビ凸用動力ユニット(品番:11-109)をBトレの電気機関車を対象にして、測定した。 下左の写真。 これらの動力ユニットは下側に管理No (71〜74) をペイントで記入しているので区別している。 そして現在設定されている車種選択ダイヤルのGポジションで走らせた。
このポジションでのデューティ比の計算式は、車速を v とすると、 dt = 0.183 * v の式で計算している。
測定結果を 下右のグラフに示す。

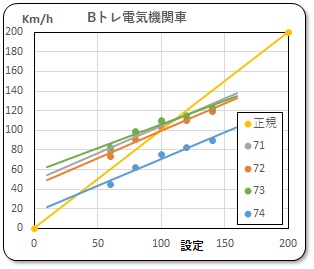
No.74 のユニットは、見た目にも遅いので、動力機構部の摩擦が大きいのかモータ自身の特性が違っているのではないかと推定する。 しかし、揃っている他の3個の個体を含めて、何だか特性の勾配が今までとは異なっているのである。
 .
.
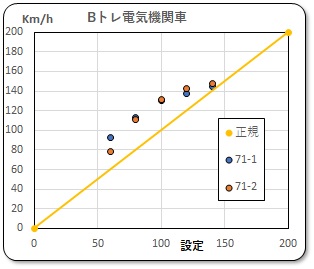
式の勾配値がマッチしていないと思って、二つのチャネルの計算式を、
dt = 0.37 * v - 9 (71-1)
dt = 0.5 * v - 20 (71-2)
として同様の測定を実施した。 その結果を右のグラフに示す。 特性の勾配は変化したものの、よく見るとデータは、 弓なりになっている!
特性は直線的になるものと思い込んでいた頭をガツンと殴られたような気がした。 そうだ、コアレスモータは直線的な特性では無いことにハッと気が付いてのである。 と言うのも、自分は既に4年も前に、このことに気が付いていたはずなのである。
「パワーユニットを知ろう PWM制御とコアレスモータ」(2017/2/3)で報告しているのである。 その前後では、苦労して色々な調査を実施しており、オシロで観察したパルス波形より、その原因も推定していたのである。 もう4年前のことは、コロリと忘れている後期高齢者の自分に唖然としているのである。
このボケナス!
波形を観察したデータをここに再掲載しよう。
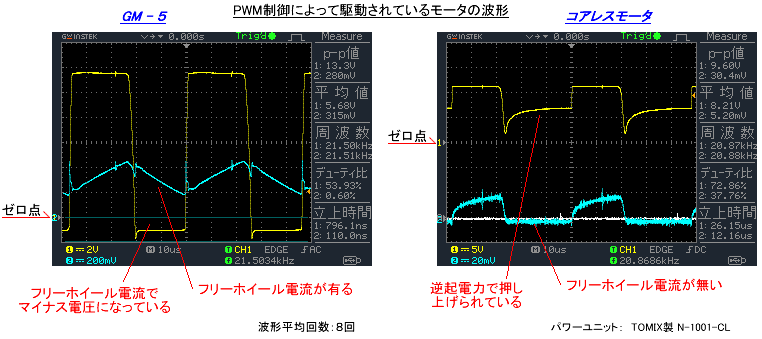
通常のマグネットモータとコアレスモータの波形の違いは、パルス波による電圧の瞬断により発生するフリーホール電流がしっかりと流れるのか、流れないのかの違いとなり、これによって逆起電力の発生具合が異なってくるのだろうと推定しています。
その結果、同じデューティ比のパルスを発生さえても、モータの回転数が異なって来ているものと考えられる。 そして、デューティ比と速度の関係は非線形になってしまうのものと結論つけることにしよう。
■ パルスのデューティ比と速度の関係
それならばと、パルスのデューティ比と速度の関係を改めて測定して、その関係式を求めることにした。 その方法は、テスト用のスケッチとして、車種設定ダイヤル毎にデューティ比を直接指定して測定を行った。 上記の動力車 Mo.71号機単機平坦路走行状態である。
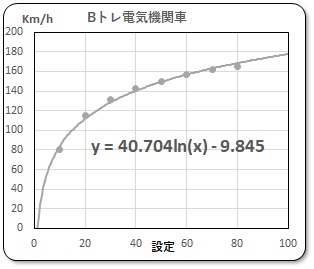
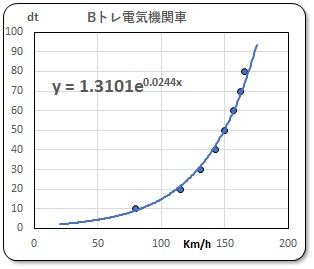
負荷無しでの走行状態であるが、横軸をデューティ比、縦軸をスケールスピードにとると、見事に対数近似曲線に乗っかって来るのである。 上左のグラフ参照。 自分が欲しいのは指定する車速に対してのデューティ比なので、縦軸と横軸を交換して近似式を求めた。 上右のグラフ。 この近似式をスケッチの中で、
dt = 1.31 * pow (2.718 , 0.0244 * v )
と記述して、再度測定を実施した。
 .
.
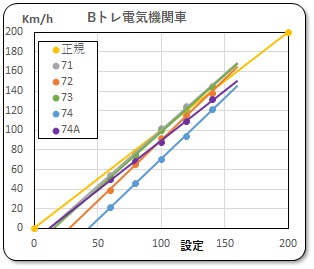
その結果を左のグラフに示す。 今度は綺麗に直線的な特性となり、指定の速度にピタリとマッチングしていることが分かる。
ここで、74号機は相変わらず遅いので、少し細工をすることにした。 常灯レベル調整用のダイヤルは今となってはほとんど意味をなさなくっていたいたので、特性値に履かせるゲタとして使用することにした。
通常モータの場合は、デューティ比の最小値が常灯レベルよりも小さい時は常灯レベルに置き換える様に記述していたが、先回の報告の様にY切片のある計算式に変更しており、このY切片の値では室内灯は点灯してしまっているのである。
そこで、このダイヤルによって指定する値を、計算した特性値に加算させる方式に変更した。 すると、室内灯の点灯を調節する原点付近以外でも、全体的に嵩上げされるので、特性値の修正ダイヤルとして使用出来るのである。 その計算式で測定したのが左のグラフに示す ” 74A ”の特性なのである。
しかし、この様な設定にしたとしても、実際にどうやって使うのだろうかと迷っている。 レイアウトで走行させる時は、いちいち速度を計測しないので、速度がマッチングしているかどうかは分からないのだ。 そこで、遅いと思ったら、このダイヤルを使って早めに調整するように使えるのだが・・・・・・・。 面倒ですね。 勿論、常灯レベル調整用として機能するので、まだまだチューニングが必要です。
スケッチでの記述は、
jov = analogRead(JOV);
jov = jov * 0.005;
dt = dt + jov;
です。 ボリュームからのA/D変換値は、max 1024 ですから、その 0.005倍、即ち 最大でも 5%のデューティ比を加算する修正です。
■ 小型蒸気機関車 C12 の測定
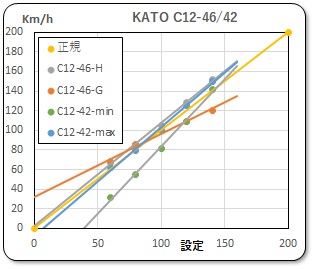
上記の結果より、コアレスモータを搭載したKATO製C12型の小型蒸気機関車 C12-46 号機を走らせて、速度特性を測定した。


 .
.
車種選定ダイヤル H は、新しく設定した指数近似式を設定しています。 常灯レベル調整用のダイヤルは最大レベルに設定しています。 また、ダイヤル G は、当初設定していた dt = 0.183 * v の式です。 常灯レベル調整用のダイヤルは最小レベルに設定しています。
このモデルも、比例式よりも指数近似式がピタリとマッチするようです。
さらに、僚機である C12-42 号機についても測定しました。 今度はダイヤル H の状態で、常灯レベル調整用のダイヤルを最小状態と最大状態にして測定しています。 調整レベルは単なる加算ですので、近似式の特徴より低速領域での修正が大きく効いています。
次に、同じく小型蒸気機関車 C56 型についても測定しまいたが、こちらは全体的に遅くなっているので新しい近似式を求める必要があると判断しました。 同じ方法で調査し、ダイヤル G がまだ空いているのでここに設定するつもりです。
2021/5/5 作成