
HOME >> 動力車の調査 > KATO製 C12-42号機の動力特性の解析 解析説明付き
鉄道模型 動力車の調査 KATO製 C12-42号機の動力特性の解析
■ C12-42号機の動力特性
.
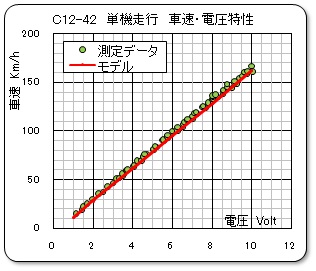
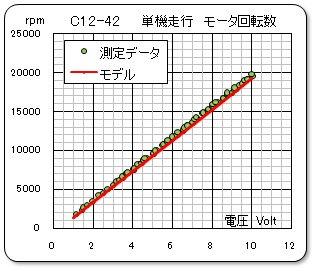
KATO製 C12-42号機の動力特性の測定データをもとにして、「新解析法の修正」(2018/8/5)にて報告した方法で解析した結果を報告する。
◆ 見かけの摩擦係数を求める
ウォームギヤの見かけの摩擦係数を求めるために、ウォームトルク t1 と、ホイールトルク t2を求めることにする。
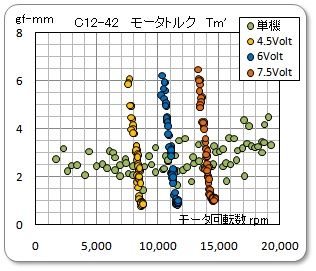
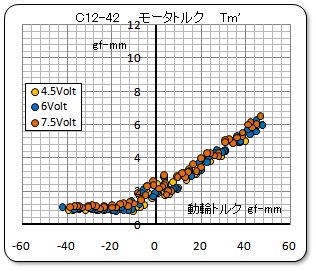
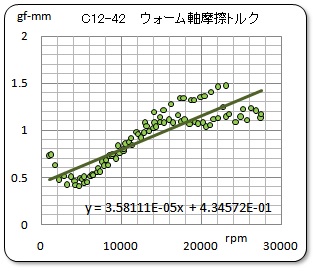
まず、モータのモデル式を使って電流値よりモータトルク Tm' を求めた。 横軸としてモータ回転数と動輪トルクを使ってフラフかしたものを下に示す。 次に、空転特性のうちウォーム軸を付けた状態での電流値データよりウォーム軸摩擦トルクを計算し、その近似式をもとめた。
この近似式をウォーム軸側の摩擦トルクのモデル式 〔 ウォーム軸の摩擦トルク = λw・Nm + Rw 〕 に合わせて、近似式の勾配をλw 、Y切片を Rw として設定する。
次に、制動側領域において、電流値が変化する遷移点を測定データから推測し、その時の有効駆動力 F2 の値よりテンダー類の摩擦トルク R2 を差し引き、動輪トルク Td を求める。 この値を、動輪軸側の摩擦トルクの固定項 Rd としてひとまず設定する。 速度係数の λd はまだ推定出来ないのでゼロに設定しておく。
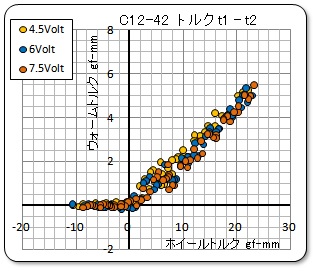
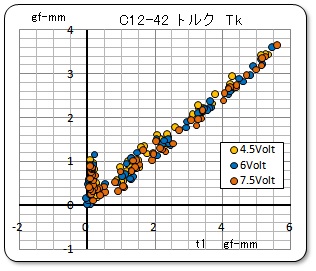
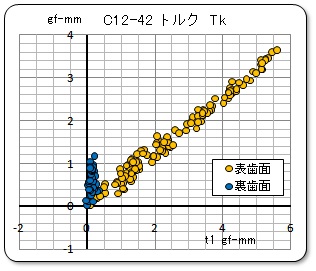
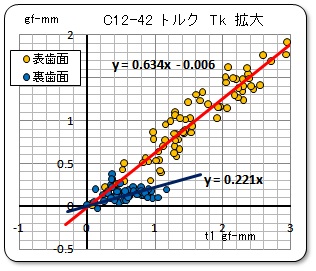
こうして設定した定数をもとにして、ウォームトルク t1 と、ホイールトルク t2 を計算してグラフ化したものを、下左に示す。 このグラフで大切な事は、駆動側と制動側の勾配が変化している点、即ち遷移点がグラフの原点に来ているかどうかである。 原理的には原点に来るはずであるので、先に設定した Rw や Rd の値を修正してみる。 Rw の値は縦軸に移動し、Rd の値は横軸に移動する。 それぞれの値の比例項であるλw や λd も関係するのでいろいろ試してみる。 ほぼ原点に移動させることが出来たら、次に作業に移るが、最終的には微調整が必要となったり、他の要素との関係で矛盾したりするので、適当な状態で妥協する必要がある。 我がモデルはそれほど完璧でないのである。
なお、このグラフの右半分は、原点が移動させているので、“駆動側”とは言えないのである。 そこで “表歯面側” と呼ぶことにする。 ウォームギヤが接触している状態が駆動状態にあるからである。 反対側は、接触歯面が裏側に回ってしまった保持力状態にあるので、 “裏歯面側” と呼ぶことに変更したのである。
この作業は、摩擦抵抗の速度項を求める作業なのである。
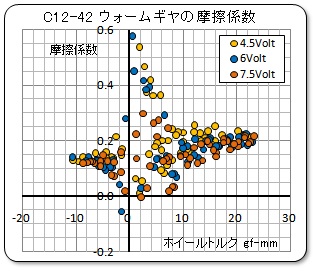
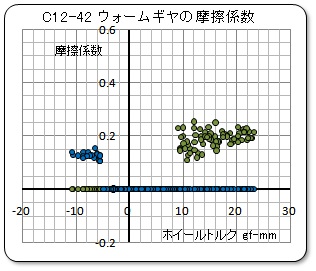
速度項が固まると、次に抗力項を求めるために、見かけの摩擦係数 μo を求める。 その計算結果をグラフにしたのが上の中央のグラフである。 この計算途中において割り算が含まれているため、原点付近では、測定誤差やバラツキの影響が大きくなってしまっているのである。 そこで、計算誤差が大きくなる中央部分をネグレクトした状態を表示させたグラフを上右に示す。 ネグレクトした部分はゼロとして表示されている。
ゼロ以外のデータを見るとある一定値を示唆しているので、その平均値を計算して、見かけの摩擦係数と推測する。 右側での平均値を表歯面のμo とし、左側での平均値を裏歯面のμo とする。
◆ スリップ率のモデル式を求める
解析当初は、「スリップ率を整理する」(2018/5/23) に示す様に、線路や車輪の材質は同じなので、どのモデルも同一のスリップ率のモデル式が適応できると考えていたが、甘かったようです。 モデルによってアンマッチが多くあったので、個別に求めることにした。
動輪に掛かる荷重が同一出ない事、特にサスペンションバネによって、第1動輪や第2動輪に掛かる力が変化すること、あるいは車体のピッチングトルクの違いなどが影響している推察する。
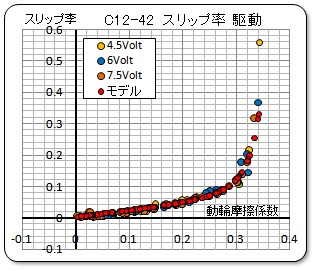
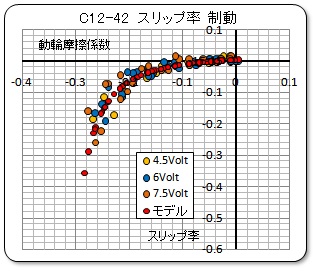
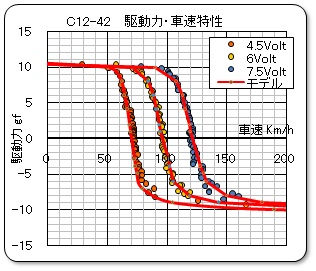
駆動側と制動側に分ける事は、先の報告と同じであるが、制動時のデータのプラスマイナスは適応する式側で対応することにした。 近似式の定数を変えてグラフの測定データとマッチするように、値を探っていった結果を上のグラフに示す。
■ モデル式の定数
こうして求めた定数を一覧表示示す。
| 寸法関係 | 動輪直径 D | 9.1 mm | 全減速ギヤ比 i | 30.32 | ウォームのピッチ円 d1 | 4.5 mm | リード L | 1.8875 mm | |
|---|---|---|---|---|---|---|---|---|---|
| 動輪荷重 Wo | 30.6 gf | 動輪系減速ギヤ比 i0 | 2.636 | ホイールギヤのピッチ円 d2 | 6.9 mm | ウォームリード角 tanβ | 0.1335 | ||
| モータ関係 | ke ( volt/rpm ) | 0.0004878 | Ra ( Ω ) | 39.2 | Eb ( volt ) | 0 volt | |||
| Kt ( gf-mm/A ) | 472.5 | Rm ( gf-mm ) | 0.99 | λm ( gf-mm/rpm ) | 0.0000796 | ||||
| 損失関係 | 電圧降下 | 0.14 volt | ウォーク軸速度係数 λw | 0.00004 | ウォーム軸固定項 Rw | 0.5 gf-mm | 表歯面μo | 0.188 | |
| テンダー等摩擦 R2 | 0.1 gf | 動輪軸速度係数 λd | 0.02 | 動輪軸固定項 Rd | 6.0 gf-mm | 裏歯面μo | 0.127 | ||
| スリップ率 | 駆動 | k | -0.00008 | p | 0.41 | q | 0 | a | 0.2 |
| 制動 | k | 0.0022 | p | 0.36 | q | -0.02 | a | 0 | |
尚、スリップ李モデルのn の項は駆動が 3 で、制動が 2 としている。
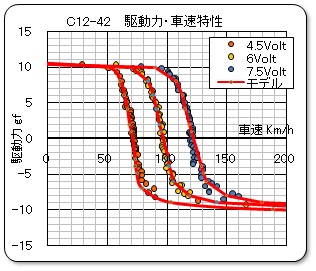
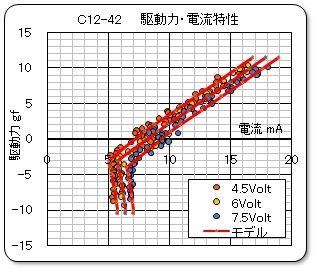
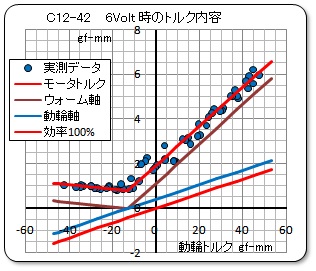
◆ 測定データとモデル式のマッチング具合の検証
上記の定数を使って計算した結果と測定データを同じグラフに示して、そのマッチング具合をチェックした。
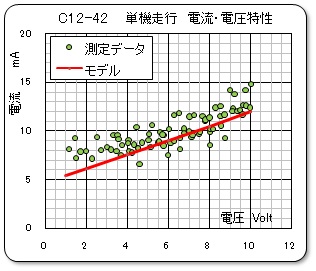
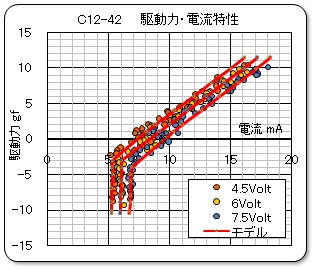
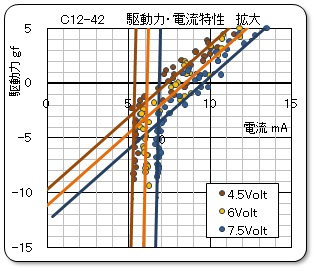
マッチングチェック時に修正した定数は、λw 、λd、 Rw、 Rd などの摩擦抵抗の定数である。 単機走行時の電流と電圧特性のずれが多く見られ、上記のトルク t1 - t2 のグラフを睨みながら 修正した。 マッチング具合によっては、駆動力・電流特性のグラフも変化していくので、ある程度の状態で良しとするようにした。 このため、信実の値とは言えない恐れがあるが、深く追求しないことにする。 我が解析の限界なのである。
そして、このことは、λw 、λd、 Rw、 Rd の値が動力車の特性に大きく影響を与えていることを示唆しているのだ。 もっとも、抗力項の解析がどんぶり状態なので、その影響も無視できないのは明らかである。 表歯面のμo や 裏歯面のμo の解析はゼロなのである。
*********************************** ( 2018/8/21 追記 ) **************************************
「抗力係数に注目して解析する」 (2018/8/21) にて検討した解析方法に従った実施した結果を追記する。
■ 抗力係数方式のモデルの場合
別方式の解析として、抗力係数に注目したモデルにより解析した結果を追加する。
ここで、裏歯面の値は X - Y 軸が逆になっているので、逆数にする必要があり。 これらの結果、得られた摩擦損失の抗力項の値と、微調整により修正した速度項を下に示す。
| 抗力項 | 表歯面 | 抗力係数 λk | 0.634 | 抗力固定項 Rk | -0.006 gf-mm | 速度項 |
ウォーク軸速度係数 λw | 0.00003 | ウォーム軸固定項 Rw | 0.45 gf-mm |
| 裏歯面 | 抗力係数 λk | 4.53 | 抗力固定項 Rk | 0 gf-mm | 動輪軸速度係数 λd | 0.02 | 動輪軸固定項 Rd | 5 gf-mm |
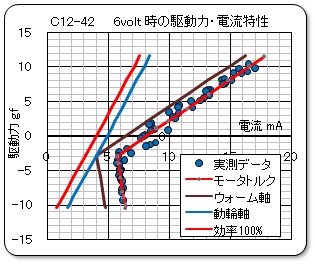
◆ 測定データとのマッチング具合
これらの定数を使って計算した結果と測定データを同じグラフに示して、そのマッチング具合を再チェックした。
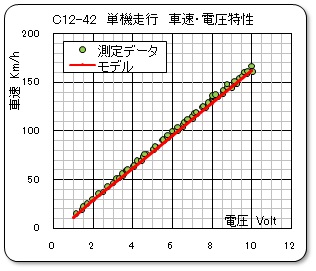
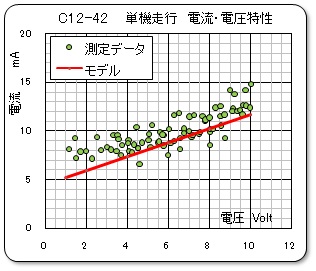
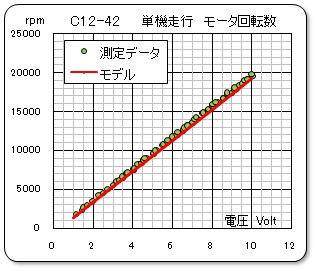
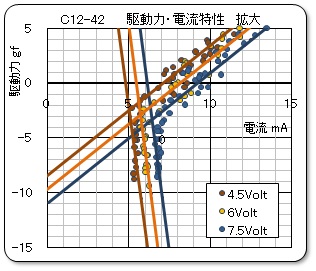
マッチング具合も問題無いレベルと思われる。
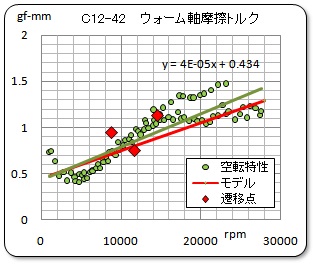
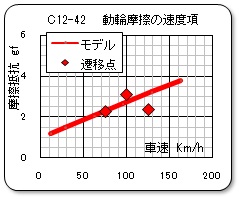
◆ ウォーム軸摩擦トルクの速度項
摩擦トルクの速度項について、モデル化した値を使って実測値と比較したグラフを右に示す。 グラフから求めた近似直線とは少しずれてはいるのは、微調整の結果である。
◆ 動輪軸摩擦トルクの速度項
動輪軸の摩擦トルクについて、遷移点のデータや抗力係数のグラフなどの値から大まかな値を把握した。
◆ 全体の摩擦損失の内容
全体の摩擦損失の内容をグラフ化してみた。 下のグラフ。 グラフの見方については、「抗力係数に注目して解析する」を参照してください。
この動力伝達機構の主な損失は抗力による摩擦損失であることが分かる。
2018/8/5 作成 2018/8/21 追記