
鉄道模型工学 スリップ率を整理する
■ いきさつ
このホームページを始めた頃、鉄道模型工学の探求の一環として、動力車の分解調査と共に各要素の特性を測定し、 より突っ込んだ動力特性の解析を実施する予定で進めたいた。 そして、「鉄道模型 動力車の調査 目次」で示した調査は、測定法の未開発のため、2012年11月1日から中断した状態のままであった。 その後、モータ端子電圧やモータトルクが測定できるようになったが、そのデータを使っての特性解析には至っていなかった。
そこで、5年半ぶりにこの作業を再開することにしたが、新たに得られた測定項目を生かすべく、車両モデルや解析法を見直すことにした。 手始めに最新測定データであるC59-123号機のデータを使ってその作業を開始し、今回は、まずモータ回転数を使ってのスリップ率データを整理する事にした。
■ スリップ率グラフの整理方法
最初に、スリップ率について説明しておこう。 「車両の静的特性のモデル化と特性解析 その2」や、「トラクション・タイヤの有無を比較する (測定データ)」、「トラクション・タイヤの有無を比較する (解析)」、「トラクション・タイヤの有無を比較する (新)」、「スリップ率について考察する」などで考察してきた。
動輪の摩擦は、動輪とレールの間に作用し、駆動力を発生させる重要な現象であるが、その摩擦係数とスリップ率の関係を示す特性を「μカーブ」と呼ばれており、右に示すようなグラフで一般的に表現されている。 今まで、摩擦係数の代わりに牽引力とか動輪の駆動力とかの名称を用いてきたが、その駆動力を動輪に掛かる荷重で割って摩擦係数μとして整理するのが一般的であるので、ここでは、この摩擦係数を用いて話を進めよう。
鉄道模型車両は、自動車と異なって動輪が多数作用している。 このため、本来ならば各動輪ごとにこのμを求めて解析しなければならないが、それはまったくの無理難題なので、ここで論じる鉄道模型動力車は、たった一つの動輪しか持っていないと仮定して考えていく事にしよう。 どんぶり勘定なのである。
ここで、関係する要素の関係式を「車両の静的特性のモデル化と特性解析 その1」から再掲載しておく。
********************************************************************
動輪の回転によって車両は前進するが、動輪のスリップのため回転数と車速とは1:1には対応していない。 即ち、車両の速度を V 、動輪の回転数を Nd 、動輪の直径を D 、スリップ率をβとすると、
![]()
の関係が成立する。 一方で、動輪のトルクを Td 、動輪の駆動力を F1 、とすると、
![]()
となる。 さらに、カプラーに掛る牽引力 Fk には、従輪の抵抗力 R2 や勾配抵抗 Wo・sin θが差引かれ、
![]()
となる。 また、摩擦係数(鉄道関係では粘着係数と呼ばれている)については、「トラクション・タイヤの有無を比較する (解析)」で示したように、動輪の駆動力を動輪に掛かる荷重で割って求めている。
**********************************************************************
なお、関係式や記号は出来るだけ統一するように気を配っているが、時間をおいて記述しているので混乱している部分はご容赦下さい。 このμカーブの表示方法は「トラクション・タイヤの有無を比較する (新)」の手法を継承した。 そして、グラフのプロット点は、緑色が駆動側を、青色が制動側を示すようにした。 また、測定においては、制動側は滑っていくので車速は早くなるものの、駆動側では遅くなってしまうので、滑り率の大きな状態はどうしても測定を躊躇してしまうのである。 このため、スリップ率の大きな領域でのデータは不十分となっているが、この様な状態での運転は好ましくないのでデータ不足と言えども問題無いと判断している。
■ スリップ率のグラフ一覧
測定したデータを元に整理し直したリストを下に示す。 なるべく新しいデータを取り上げており、データに疑問があるものなどは今回は見送っている。
| 区分 | 車両番号 | メーカー | 品番 | 車軸配置 | トラクション位置 | スパン | 動輪軽 | カプラー |
|---|---|---|---|---|---|---|---|---|
| 蒸気機関車 | C12-46 | KATO | 2022-1 | 1C1 |
o 〇〇● o |
未測定 | 9.2 |
従台車 |
| C58-127 | KATO | 2010 | 1C1 |
o 〇〇● o |
24.91 | 10.1 |
テンダー | |
| C57-180 | KATO | 2013 | 2C1 |
oo 〇〇● o |
28 | 12.0 |
テンダー | |
| C59-123 | KATO | 2026-1 | 2C1 |
oo 〇〇● o |
25.4 | 11.4 |
テンダー | |
| C62-36 | KATO | 2019-2 | 2C2 |
oo 〇〇● oo |
25.6 | 11.4 |
テンダー | |
| C62-2B | KATO | 2017-2 | 2C2 |
oo 〇〇● oo |
25.4 | 11.4 |
テンダー | |
| 電気機関車 | EF81-119 | KATO | 3010-1 | B - 2 - B |
〇● oo ●〇 |
78 | 7.4 |
台車 |
| EF210-109 | TOMIX | 9142 | B - 2 - B |
〇● oo ●〇 |
未測定 | 7.6 |
ボディ | |
| EF510-4 | TOMIX | 2162 | B - 2 - B |
〇● oo ●〇 |
未測定 | 7.7 |
ボディ | |
| EF58-60 | KATO | 3050 | 2-B1-1B-2 |
oo ●〇o o〇● oo |
未測定 | 8.4 |
先台車 | |
| EF15-79 | KATO | 3062-1 | 1C - C1 |
o●〇〇 〇〇●o |
未測定 | 8.4 |
台車 | |
| 新幹線 | 300系-5 | TOMIX | 92810 | B - B |
〇● ●〇 |
未測定 | 5.6 |
ボディ |
| 516-3 | KATO | 10-510 | B - B |
〇● ●〇 |
109 | 5.5 |
ボディ | |
| 電車/気動車 | モハ313-8 | KATO | 4447 | B - B |
〇● ●〇 |
91 | 5.5 |
ボディ |
| モハE231-601 | KATO | 4472-1 | B - B |
〇● ●〇 |
91 | 5.5 |
ボディ | |
| 名鉄2401 | GM | 4093 | B - B |
〇● ●〇 |
83 | 5.9 |
台車 | |
| モハ102-81 | TOMYTEC | 動力 TM-18 | B - B |
〇● ●〇 |
93 | 6.0 |
台車 | |
| クモハ313-3020 | KATO | 4449 | B - B |
〇〇 〇〇 |
91 | 5.5 |
ボディ | |
| キハ35-68 | KATO | 8074-2 | B - B |
〇〇 〇〇 |
91 | 5.5 |
ボディ |
スリップ率に関係すると思われる諸元などのデータも記載した。 車軸の配置、トラクションタイヤを履いた動輪の位置、動輪の最大スパン、動輪径、そして車体に掛かる負荷の位置に関係すると考えられるカプラーの位置なども記載した。
トラクション位置の欄は、●印はトラクションタイヤを履いた動輪を示し、〇印は通常の動輪、o 印は非動輪を示している。 そして、スペースで開けている部分は別台車であることを表示した。
スパンは、車体重量やピッチングトルクを動輪に配分する場合の参考として示した。 特に車体にピッチングトルクが掛かった場合には関係する要素である。 そして、ボギー車の場合は、台車の回転軸間の距離を、SLの場合には動輪間の最大距離を取り上げている。
自動車の場合、ブレーキをかけると前のめりになるノーズダイブの現象や、加速時に前が浮き上がる現象と同様に鉄道車両でも発生しているのだ。 牽引力によって後ろに引っ張られれば前方の動輪が浮いてくるだろうし、ブレーキ状態ではあれば、前方が沈む、即ち動輪の荷重が増えると考えられる。 スパンが長く、トラクションタイヤの位置が対称的な電気機関車や電車では、駆動時と制動時の動輪の荷重状態の変化によるスリップ率の差は出ないと推定うするが、非対称である蒸気機関車の場合は、異なってくるものと考えて於くべきであろう。
カプラーについては、車体に掛かる牽引力によるピッチングトルクが影響しないかと考えたが、今回は未解析である。
◆ 蒸気機関車系のスリップ率と摩擦係数
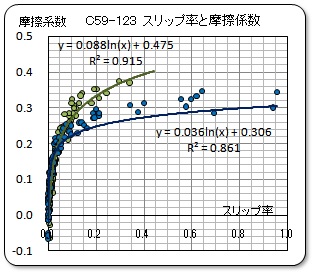
まず、蒸気機関車のデータを見てみよう。 車輪配置はC型の模型のみであるが、C57-180号機を除いて、データが似かよっていることに注目しよう。
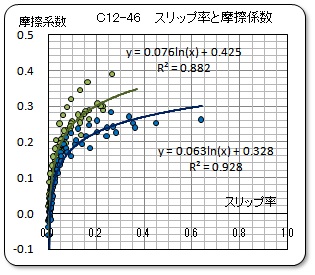
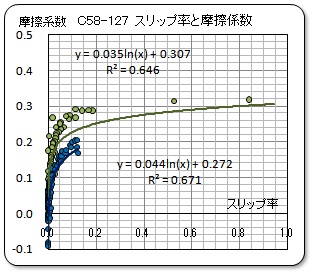

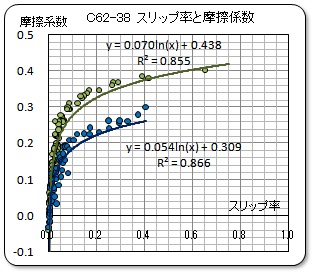
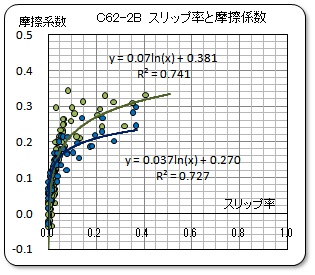
グラフより、駆動時(緑色のプロット点)のμは、制動時(青色のプロット点)のμよりも大きくなっていることが明白である。 駆動時は、0.3 から 0.4 に向けて上昇し、制動時には 0.3 止まりの傾向が観察される。 これは、トラクションタイヤの位置と車体のピッチングトルクの関係と睨んでいるのだが、C57-180号機だけが逆転しているのが不思議である。 制動時のノーズダイブ現象時はトラクションタイヤを履いていない第1動輪により多くの軸重がかかり、駆動時はその反対のトラクションタイヤを履いた第3動輪に軸重が移っているためと考えると、屁理屈が成り立つのである。 (これはあくまで屁理屈です・・・・・・・・! 証明されていません!) 進行方向を逆にして測定すれば明らかになるかも知れませんね・・・・・・・・・。 また宿題が増えました。
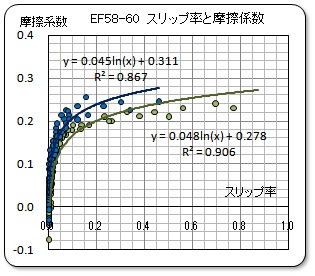
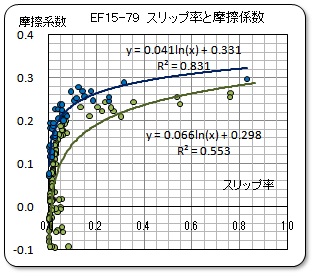
◆ 電気機関車系のスリップ率と摩擦係数
次に、動輪配置が前後対処な電気機関車系のグラフをみてみよう。 まず、B - 2 - B 配置の下のモデルを観察する。
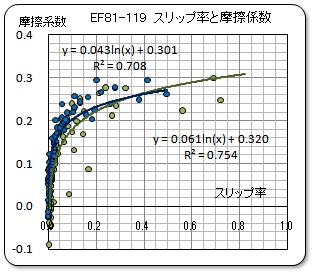
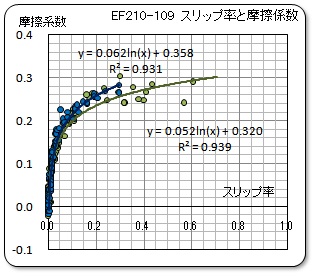
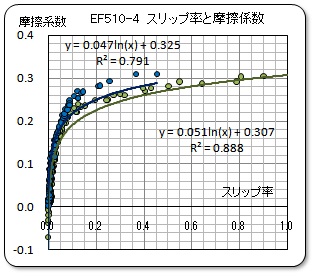
我が推論どうりに、駆動時と制動時のμカーブは、ほとんど同じと言えるだろう。 そして、動輪配置がややこしい下の二つのモデルは、この傾向とは少し異なっているいるのも興味ある現象である。
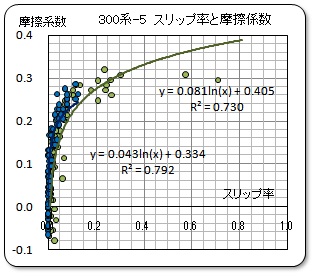
◆ ボギー台車の電車系のスリップ率と摩擦係数
次に動輪構成が単純なボギー台車構成で4個の動輪を持つ電車類を見てみよう。 まず新幹線系を下に示す。
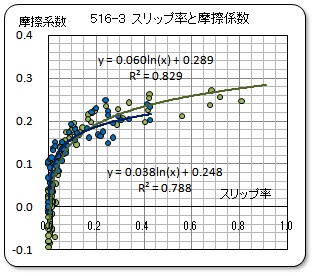
電車系の幾つかを下に示す。 クモハ313-3020とキハ35-68は、トラクションタイヤを履いていないモデルである。
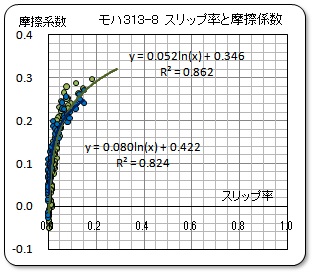
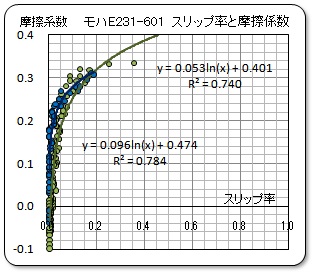
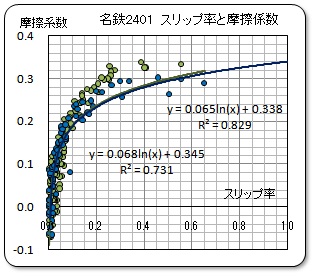
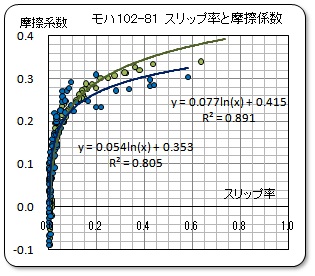
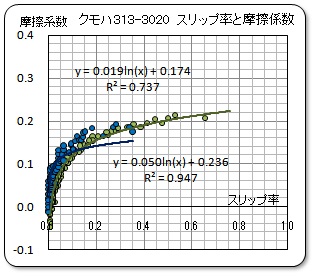
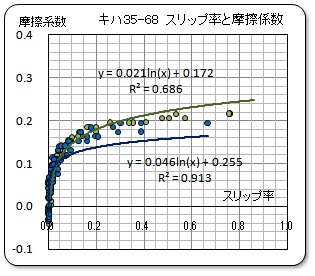
駆動時と制動時のμカーブは、0.3 程度でほとんど同じと言えるし、トラクション無しでは 0.2 が限界のようで、その差は明らかである。
■ データの活用方法
これらのデータを何に活用できるのか考えてみた。
(1) そのモデルの特徴を理解する。
これは自己満足の領域であり、なるほど・・・・・、フムフム・・・・・・と悦に入って鉄道模型を楽しんでいるのである・・・・・・・・・・。
(2) 鉄道模型工学として活用する。
わがホームページは、大袈裟に鉄道模型工学などとうそぶいているが、そのデータの一環として活用できるのである。 鉄道模型の特性を数式で記述する、即ちモデル化することによって、模型の特性を机上にて計算出来るようになるのであるが、自分は模型を製作する立場では無い。 あくまでもモデルを構成する設計要素を把握して、そのモデルの特徴を知る事である。 これも鉄道模型に対する我が楽しみ方であるのだ。 ホビーの範疇で測定や実験を実施し、ホビーの範疇で解析してそのモデルの特徴を把握する。 これもまた楽しからずや!・・・・・・・なのだ。
さて、スリップ率と摩擦係数の関係、μカーブの使い方を説明しよう。 鉄道模型の動力車は、供給された電力をもとに、坂道や牽引する車両の負荷に応じて、駆動力を発揮する。 充分な駆動力があれば早く走るし、不足する場合であれば遅くなるのである。 即ち、その時の負荷に応じた速度で走行することになる。
負荷は、必要な駆動力を要求し、それはモータが必要とする電流を求めることになる。 電源にその能力が有れば必要な電流を供給出来るので、モータはそれに応じて回転数を変化させる。 そして、そのモータ回転数は伝達機構によって動輪の回転となり、駆動力に応じた摩擦系μによて動輪の移行距離、即ち車体速度が決まって来るのである。
従って、モデル上の計算では、負荷に応じた駆動力を求め、さらに、動輪荷重が分かっているので摩擦係数が計算できる。 そしてこれによってスリップ率を計算し、最終的には車速という特性を表現することになる。 こうして、負荷と車速の特性が計算できるようになるのである。 この計算値と測定された牽引力特性をグラフ上で比べてみれば、モデルの正確さが比較できるのである。
このため、モデル計算では、摩擦係数からスリップ率を求めるための関係式が欲しい。 そこで上記に示したμグラフでは使い難いので、縦軸と横軸を逆転させグラフを表示させ、そのグラフより関係式を近似させて数式化させることにする。
◆ KATO製最新の蒸気機関車のスリップ率の近似式
上記のデータより、特性の似ている C59-123号機、C62-36号機、C62-2B号機のデータをひとまとめにし、Y切片が0.0 の近似式を求めた。
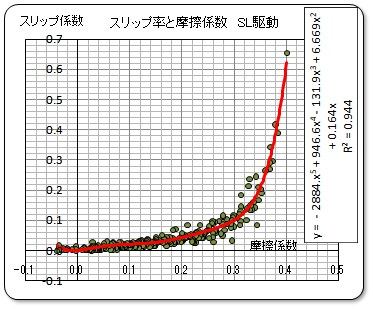
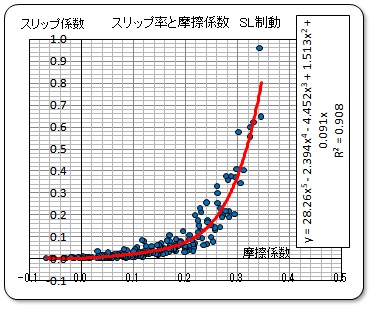
色々な式を当てはめてみたが、6次式が一番ピッタリのようであった。 6次で近似しても6次の項はゼロであった。 より妥当な近似式を得るため、全体のプロット点の傾向より大きく外れていると思われる測定点はネグレクトしている。 得られた近似式は、
駆動側: y = - 2,884x5 + 946.6 x4 - 131.9 x3 + 6.669 x2 + 0.1648 x
制動側: y = 28.26 x5 - 2.395 x4 - 4.452 x3 + 1.513 x2 + 0.09161 x
であった。 この式は、動輪配置が類似したSLモデルに適応できるものと判断する。
◆ 追記 (2018/5/23)
上記に示した近似式を使って実際に計算してみた。 しかし、高次の多項式で示された計算式では、意外と計算誤差が大きい事にびっくりした。 計算された数値は、0 から 1.0 の間になる筈であるのに、結果は桁外れの数値が散見されるのである。 高次の項のプラスとマイナスに振れる計算式なので、計算誤差が大きく出てしまうものと推定した。 そこで、もっと簡単な式で近似させることにした。
右上がりに急上昇する特徴に対して、対応するより簡単な数式をいろいろ探してみた。 そして辿り着いたのが下に示す分数関数式であった。
ここで、定数 p は漸近させる x の値を決める定数であり、k と n は上昇するカーブの具合を設定し、a は全体の傾斜具合を近似させ、最後にゼロ点のずれを修正させるために q を設定するとするものである。 そして、設定した近似カーブと実際のデータの誤差計算して、その誤差具合を見ながら定数を探っていくのだ。 これは、全くのトライ・アンド・エラー手法で計算するので、まさに暇人の裏技なのである。
そして、求めた結果を下のグラフに示す。 近似式との誤差の大きさは仕方のない事 ( 測定値のバラツキなのだ ) であるが、その誤差の分布を、ゼロ近辺にまとめる事が重要なのである。 そして、バラツイている遠くの点よりも、点が密集している部分を重要視しているのだ。 全体の傾向を重視しているからである。 また、実際にモデルでの計算をしてみて、スリップ率の大きい領域よりもゼロ近くの近似誤差の少ない方が重要であることも気が付いたのである。
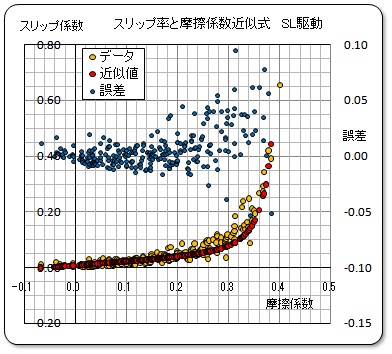
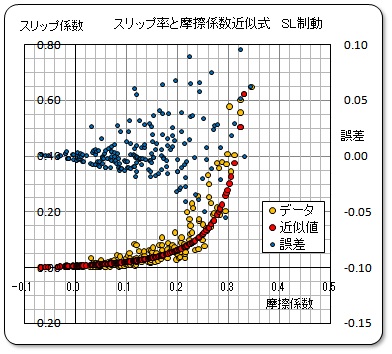
こうして求めた近似式の定数を下に示す。
| p | n |
k | a | q | |
|---|---|---|---|---|---|
| 駆動側 | 0.45 | 3 | -0.00011 | 0.13 | 0.005 |
| 制動側 | 0.4 | 2 | 0.003 | 0 | -0.015 |
![]()