
HOME >> 鉄道模型工学 > 鉄道模型工学概論 > 円盤式傾斜台を使用した測定方法 その1 2 3
鉄道模型工学概論 円盤式傾斜台を使用した測定方法 その1
§1 はじめに
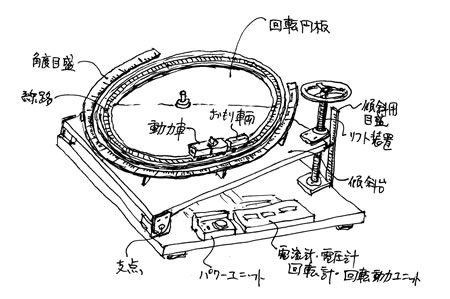
鉄道模型工学概論の動力特性の理論と測定において、今後の装置改善のために、アイディアのひとつとして提案していた「円盤式傾斜台を使用した測定台」(下図)について、その検討を実施したので報告する。
今までの実験装置の改善点として、
- 牽引力計は市販の秤がそのまま使えないでろうか。 測定が面倒で、もっと信頼性と効率を上げたい。
- 円盤駆動部の改善。 ゼロスタートからスムースに回転させること。 速度計測の広範囲化、回転の安定化など。 ある程度のパワーがあり、回転の制御がスムーズであり、回転計測が容易なこと。
⇒ HOゲージ用のモータが使えないだろうか。 モータ軸が両側に出ているもの。 一方を円盤駆動に使用し、他方を回転計測に使用する。 - データの収集の効率化をもっと図れないだろうか。 速度調整の自動化、データのパソコンへのオンライン取り込みなど。
- 円盤の駆動音が大きい。 もっと静かにならないものか。 台としてベニヤ版を使ったのも失敗であった。 共鳴して音が大きくなっている。 自転車の車輪を円盤として使用すれば、木の枠構造で対応出来そうである。
などを挙げていたが、項目2の動力部の改善については、定置実験装置の駆動部の改良 (2011.6.15)で述べた様に、HOゲージ用のモータではパワー不足により採用出来なかった。 その代わり、速度測定のためのアイドラ軸の設置などの改良により、速度計測の安定度を確保する事が出来た。 同時に、作動音が小さくなり、項目4の改善にもつながった。 そして今回、項目1の改善として牽引力計の代わりに、円盤式傾斜台を使用して測定する方法を検討することにした。
なお、項目3に対しては、計測データを読み取った後に、傍に置いたノートパソコンに直接手で入力し、そのまますぐにグラフ化することによって、計測データのチェックや比較を実施する方法をとり、データ収集方法を少し改善してみた。
§2 第1の測定方法の検討
円盤式傾斜台を使用した測定方法の一つとして、角度目盛りを使用せず、車両を常に正面に来るように円盤の回転数を調整すれば、その時の傾斜角と速度で、駆動力と速度の関係を計測出来ると考え、実験してみた。
実際に計測を始めると、車両を正面に安定させるのが非常に困難であることが分かった。 測定方法は、供給電圧を一定値に設定し、傾斜角を変化させながら円盤の回転数を調整するのであるが、円盤の回転と車両の応答の反応が遅れているようで、ピタッと決まらない。 いつまでも前後にふらふらと走行している。 のんびりやの小生でもさすがに我慢出来ず、この方法を早々と見切る事にした。
§3 第2の測定方法の検討
予備実験でもうまく行ったので当初に想定して通り、円盤の回転と傾斜による負荷とがバランスして、車両がある一定位置に留まる状態を保持するときの角度位置を測定する方法で実施することにした。 供給電圧、および傾斜角と回転速度を設定すれば、車両がある位置を保持する。 多少は前後にふらふらとするものも、その位置を読み取るのはなんとか可能であった。 しかし、この方法を実施するためには色々な準備が必要であった。
§3.1 見かけの勾配の算定
まず、車両が保持している位置から、その時の見かけの勾配を算出する必要がある。 その関係図を下記に示す。
誰でもが承知のごとく、地球の重力は車両の重心に作用する。 そしてその重心の軌跡は、円盤面に設置されているレールと平行して移動するので、レールの半径Rと同じ円形の上を移動することになる。 そしてその重心が、重心位置αの位置を保持している時、その速度ベクトルを v とする。 速度ベクトルは重心点の軌跡と接戦をなすが、この速度ベクトルを含む鉛直面を考えるとき、速度ベクトルの先端の鉛直方向のリフトを h 、見かけの勾配をβとすると、
h = v sinβ
である。 この鉛直方向のリフト h は正面から見ても同じ高さであるため、円盤の傾斜角をθとすると、
h = v sinα・sinθ
即ち、
sinβ=sinα・sinθ
重心位置αを計測すれば、その見かけの勾配βを計算する事が出来る。 そして、重心位置αがゼロのとき(円盤の最下位か最上位)には、見かけの勾配はゼロとなり、90°あるいは180°の位置では最大傾斜となり、円盤の傾斜角θと同じ値になる。
§3.2 負荷と牽引力とのバランス
この方法は、重力による負荷と車両の牽引力がバランスする点を測定する方法であるが、その屁理屈を少し解説しよう。
回転円盤を上から見ると右の様に、4つのゾーンに分けて考える事が出来る。 そして、傾斜している円盤のもっとも低い位置を重心位置の角度αの基準とする。 そして、見かけの勾配βによって、車両の重心に掛る重力が車両に負荷 F を作用させる。 即ち、
F = Wo・sinβ = Wo・sinα・sinθ
となる。 ここで、Wo は車両の重量である。 円盤の傾斜角θをある設定値にセットしておくと、この負荷 F は、重心位置αの値によってサインカーブで変化する。 その様子を下の線図にしめす。
最初の(1)のゾーンでは、前進すると共に負荷が増大する登り坂である。 しかし、(4)のゾーンに入ると登り坂ではあるものの、前進するに従って負荷は減少していくのである。 峠の頂上に近づくのである。
一方、(2)のゾーンは、下り坂であり重力によって後ろから押されている状態である。 そして、前に進むにつれてその力は軽くなっていく。 また、(3)のゾーンでは前に進むにつれて押される力が増えてくる下り坂である。
そして、負荷の最大値は、車両の重量と円盤の傾斜角θで決まる。
次に車両の牽引力特性を考えてみよう。 自動車や電車など原動機をもつ機械において、牽引力と速度の関係を示す線図において、右下がりの線図と右上がりの線図がある。 この右下がりの特徴を描く機械は、速度が上がるにつれて機械(車両)が発揮する牽引力は低下していく特性を持ち、 逆に右上がりの特徴を持つ機械は、速度が上がるにつれて機械が発揮する牽引力はどんどん大きくなる特性を持っている。 言い方を変えると、機械に掛る負荷が大きくなるとスピードダウンするのが右下がりの特徴であり、負荷が大きくなると逆にどんどんスピードアップするのが右上がり特性である。 下のイメージ図を参照されたい。
常識的に考えると、殆どの機械は右下がりの特性を持っている。 人間で考えても良い。 重い荷車を引く時は、人の歩みは遅くなるのである。 そして荷が軽くなると今度は快適に走る事ができるのである。 馬力(パワー)は力と速度の積であり、力と速度の関係が右下がりのとなるのは納得できる現象である。
この右上がりの特性を持つ機械の例を私は知らないが、部分的にその特徴を持つ場合は、有りうると思っている。 例えば動力特性がS字カーブを描く様な場合である。 それが、鉄道模型の制動領域に存在する場合があるのではないかと疑っている。
さて、上記の状態の傾斜した回転円盤上で、車両を走行させて場合、どのような現象となるのであろうか。
まずバランス点について考えて見よう。 回転する円盤(線路)の回転速度と車両の走行速度が合致すると、静止座標系、即ち外側から見ると、その点に留まっている事になる。 即ち、重心位置αは一定値を保持する事になる。 これがバランス点である。
次のこのバランス点から何らかの要因(一般的には外乱と呼んでいる)で車両が前後に動いてしまった場合を考える。 もし車両が前に前進してしまった場合、現在、(1)のゾーンを走行中とすると負荷が大きくなり、その結果、車両が右下がりの特性を持っておれば車両のスピードはダウンする。 そして車両は後退して行き、もとのバランス点に戻ってくる。 車両が後退した場合にはその逆となる。 下の図を参照してください。 こうして、外乱によって状態が変化しても元の状態に戻る事が出来る。 即ちバランス点を安定的に保持できるのである。 これは、右下がり特性を持った車両は(1)のゾーンのバランス点で安定した状態を保持出来ることを説明している。
もし、車両が右上がりの特性を持っている場合、車両が前進し負荷が大きくなると、車両はさらにスピードアップして前進を続ける。 そして元のバランス点には戻ってこれないのである。 後退した場合でも同様に戻ってこれないのである。この問題はシステムの安定性・不安定性の問題と同じであり、車両側と負荷側の特性によって、その安定性は変わってくるのである。
そこで、車両の特性と走行ゾーンでの安定性に関してまとめて見ると、下記の表に要約される。 ゾーン(3)(4)では右上がり特性を持つ車両をバランスさせることが出来る点に注目して頂きたい。
| 特性と走行状態 | ゾーン(1) | ゾーン(2) | ゾーン(3) | ゾーン(4) |
| 右下がり特性/駆動状態 | 安定 | --- | --- | --- |
| 右下がり特性/制動状態 | --- | 安定 | --- | --- |
| 右上がり特性/駆動状態 | --- | --- | --- | 安定 |
| 右上がり特性/制動状態 | --- | --- | 安定 | --- |
安定しないゾーンでは、車両は何時までも前進または後退を続け、止まってくれないである。 このため、牽引力を測定する事が出来ないのである。
§3.3 計算式
車両自身の重量と円盤の勾配だけで、車両の牽引力を測定する事は可能である。 しかし、Nゲージの鉄道模型では、牽引力を高めるために動輪にゴム輪を履かせるなど、粘着抵抗を高くする工夫がなされている。 このため、同じ車両重量を利用する傾斜式の牽引力測定装置では、粘着領域での牽引力を測定するために、粘着係数μとの関係で30度以上の勾配が必要となる。 この状態での測定は無理があるので、負荷用の車両を連結することにした。
この負荷用の重り車両を連結状態で走行させる時、試供車両と重り車両の重心間角度は常に一定であり、静止状態で測定しておけば、どの位置を走行していても、負荷車両の位置を計算で求める事が出来る。
即ち、円盤の傾斜角θ、試供車両の重心位置α、試供車両の重量 Wo 、重り車両の重量 Wt 、試供車両と重り車両の重心間角度αt 、重り車両の走行抵抗 R 、とすると、 牽引力 F は、
F = Wo・sinα・sinθ + Wt・sin(α−αt)・sinθ+R
となる。