
HOME >> 鉄道模型工学 > DCモータのブレーキ制御方法を検討する
鉄道模型工学 DCモータのブレーキ制御方法を検討する
先月から気にしていたDCモータのブレーキ制御方法について、やっと糸口を掴むことが出来た。今回は、まずその考え方を自分なりに整理してみた。
■ いきさつ
先回報告した「μ特性を測定しよう 測定装置の検討」(2025/8/30)において、負け組の制御のためにDCモータをブレーキ装置として使用しようとした。負け組の制御の例は、電車の電気ブレーキ、あるいは回生ブレーキと言われるブレーキ制御などであり、モータを発電機として使用してブレーキをかけている発電状態なのです。
そこで、この発電状態における回転数制御を実施すれば問題は解決できると考えて、その方法をネットで調べてみました。でも、参考となる解説情報は見つかりませんでした。電気回路に対する知識に乏しい小生としては手が出せなかったのです。
そして、この方法を諦めて、出力側の力のフィードバックを断ち切る逆効率ゼロのウォームギヤを減速機構として使うことにしたのです。メカ屋がメカに頼ってしまいました。今回はそのリベンジとして、DCモータのブレーキ制御方法について考えてみたのです。
■ ブレーキ回路の検討
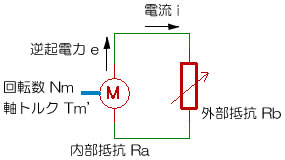
まず、モータの発電状態を制御出来るのは、外部に接続した可変抵抗が考えられます。モータに発生した逆起電力が電流となってモータ端子間を流れるので、その電流を抵抗を変化させることによってコントロールできると考えました。その回路を右に示します。
 .
.
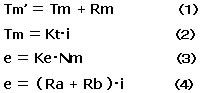
モータの軸をトルク Tm' にて回転させた時、(1)式のように、モータの軸摩擦トルク Rm を減じたトルク Tm によって発電機能が働きます。 なお、式の簡素化のために、影響が小さいと思われるモータ軸回りの摩擦損失速度係数 λm はゼロとみなして省略しました。高速時に増える摩擦力を無視しましたが、実際の測定結果によっては復活させる必要があるかもしれません。
次に、モータコイルの回転によって発生する電流 i は、(2)式に示すように、トルク定数 Kt の関数となります。そして、この時発生する逆起電力 e は、(3)式のように、逆起電力定数 Ke と回転数 Nm とに関係付けられます。
さらに、逆起電力によって発生した電流 i は、負荷抵抗 Rb を回ってモータに戻って来ますが、モータの巻線抵抗をRa とすると、その値はオームの法則に従って(4)式のように求めることが出来ます。なお、ここでもブラシ部に発生している電圧降下量 Eb についても値が小さいのでゼロとみなして省略しました。
 .
.
これらの関係式より、モータの回転数 Nm とモータの軸トルク Tm' の関係を導き出すことが出来ます。
![]()
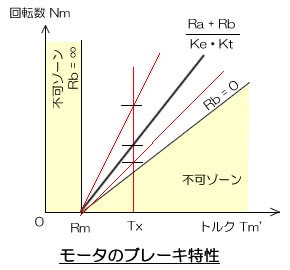
この式が示す直線を右のグラフに示します。Nm = 0 の時、Tm' = Rm となり、その後は勾配のある直線となります。右のグラフの太線で示した直線です。そして、外部の可変抵抗 Rb を変化させる事によってその勾配を調整することになります。
なお、モータ特性に関する報告は「モータ特性のモデル化 改良版」(2016/10/25)などを参照してください。
■ 回転数の制御方法
このDCモータを使って、ブレーキ時の回転数を外部に設けた可変抵抗にて制御する場合を考えてみましょう。
負荷トルクが Tx の場合、力のバランスにより、上に示した式(5)によって示される特性直線との交点がその時のモータ回転数となります。
そして、可変抵抗を大きくすると特性直線の勾配が急になり、結果として回転数は増加します。逆に可変抵抗を小さくすると回転数は低下します。何だか逆のような気がしますが、今まで、この現象がいまいち理解できなかったモータの発電特性なのだと納得した次第です。
また、回転数が一定の場合は、可変抵抗を大きくすると負担することが出来るトルクは低下し、その抵抗をゼロにしてもある値にて限界になってしまします。これは、端子をショートさせる(抵抗をゼロにすることを意味するのだ) と最大のブレーキ力が発揮できるという事になります。モータドライブの回路の説明の中で、ショートブレーキモードと説明されていたのはこの状態だったのです。やっと理解できたのだ。
そして、注目しておきたい点として、可変できる抵抗の範囲は、ゼロから無限大までしか調整できないので、調整可能なゾーンが限定されるということです。抵抗がゼロとは、モータの両端子をショートさせた時であり、無限大とは両端子を解放した状態なのです。
この範囲なら外部の可変抵抗値を変化させれば調整可能ですが、それ以外は調整不可能なゾーンがあるのです。グラフでは、黄色のゾーンで示しました。モータを駆動状態で使用する場合、最大トルクと最大回転数の範囲であれば、電圧を変化させることによって自由に設定できるのですが、ブレーキ状態で使用する場合はそうはいかないようですね。
■ ブレーキ用モータとしての適応性
さらに、重要なことは、モータの特性によって、これらの様子が変わってしますのです。ブレーキ用として使用する場合に適したモータ特性とは何だろうかと考えました。
利用するために、その調整範囲が広いことが必要になってきますので、その要件を考えてみました。 即ち、負荷トルクや回転数を制御する場合には、
- モータ軸摩擦トルク Rm は小さい方が制御範囲は広くなる。
- モータの巻線抵抗 Ra は小さい方が制御範囲は広くなる・・・・・?
- でも、Ke や Kt との兼ね合いがあるので、これらの値をひとくくりとして考慮する必要がある。
という事なので、対象として考えるモータの各特性値を知る必要が出てきました。でも、これらの特性値はモータのカタログには記載されていません。しからば、自分で測定するしかないのだろうか?これは、面倒な作業でもあるし、実物を入手する必要もあるのです。
**********************************************
そこで、多くのカタログに記載されているデータを元に計算する方法を検討してみました。次回報告。
さらには、上記の考え方が正しいのか実験して確かめる必要もあります。