
HOME >> 鉄道模型工学 > カタログ値からDCモータの特性値を推定する
鉄道模型工学 カタログ値からDCモータの特性値を推定する
先回の報告の続きとして、カタログに記載されているデータを元にDCモータの特性値を推定する方法を検討してみました。
■ カタログに記載されているデータについて
小型のDCモータの入手方法として、ネットでの通信販売や模型店での直接購入など、モータ単品で入手する方法の他に、模型キットなどのに含まれているもの、模型や家電製品をばらして取り出したものなどがあります。
しかし、その仕様を調べようとするといろいろ難しい場合があります。もし、データシートとして提供されている場合は最高ですが、記述のみである時も参考とすることが出来ます。メーカ名や型番だけしかわからに場合には、ネットで調べる方法もあります。最終手段は自分で測定するしかないでしょう。
これらのカタログやデータシートに記載されている主な仕様として、
- 定格電圧
- 無負荷回転数、電流
- 定格負荷回転数、電流、トルク、出力
- 停動トルク、電流
などがの項目のデータがあれば充分です。
■ カタログ値から計算する
 .
.
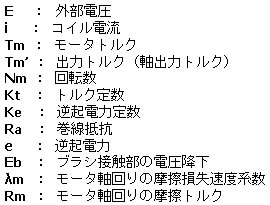
データを入手出来たら、特性値を計算してみましょう。考え方の元は「モータ特性のモデル化 改良版」(2016/10/25)で検討した内容に沿って進めます。使用する記号は右の通りです。ここで、電流の記号は、大文字から小文字に変更していますが、計算途中で大文字の T と I をたびたび間違えてしまったので、変更しました。
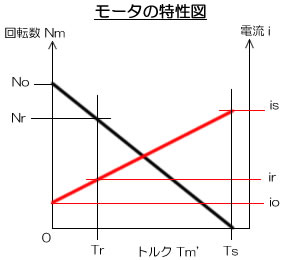
まず、カタログから入手したデータをグラフ上に示します。
 .
.
記号のサフィックは、無負荷時は o 、ストール時は s 、定格時は r を使用しました。
まず、基本式を復習することにしましょう。電圧と回転数の関係と、電流とトルクの関係は独立しているのでそれぞれ別々に計算することが出来ます。
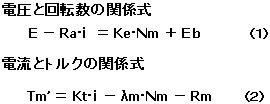
この式には、求めたい未知の特性値が6個含まれています。Ra、 Ke、 Eb、 Kt、 λm、 Rm の未知の定数ですです。 そして、変数としては、回転数の Nm 、トルク Tm' 、電流 i、電圧 E があります。条件としては無負荷時、定格時、ストール時の、それぞれの電圧と電流、および回転数とトルクの値がカタログより入手できますので、これらの条件を使って連立方程式を解いて、6個の定数を求めることが出来ます・・・・・・・が。
そのややこしいい式を解いたのですが、差分を差分で割算する等の心配な内容を含んでいました。値の近い差分は、有効数字の桁落ちが心配なのです。引き算による桁落ちが発生すると、誤差は一桁アップしてしまいます。これは、カタログ値がどれだけの精度で記載されているかに掛かってきてしまいます。例えば電流値の値の有効数字は、多くの場合2桁であり、3桁目は四捨五入したのか切り捨てたかは分かりません。その差分をとった場合は有効桁数は一桁になってしまうと恐れがあります。あまりあてにすることが出来ません。
*****************************************************************************
そこで、思い切って式を簡素化することにしました。まず、今までの実験結果より、ブラシ接触部の電圧降下量は極めた小さいことが分かっていましたので、Eb ≒ 0 として無視することにしました。さらに、トルク定数 Kt と逆起電力定数 Ke は、単位を合わせれば同じ値になるという事実を利用して Kt を Ke から換算して使用することにしました。
数値が同じになる時の単位は、Ke の分子が volt で分母か rad/sec であり、Kt の分子は N-m で分母が A です。そこで、自分が使用していいる単位、即ち、回転数の単位を rpm 、トルクの単位を gf-mm とするならば、換算式は、
![]()
となります。これを整理すると、
![]()
となります。この小細工によって求める定数を4個に減らすことが出来ましたので、利用するカタログ値は無負荷時とストール時の値を使用することにしました。
● 電圧と回転数の関係
電圧と回転数の関係式(1)より、無負荷時とストール時の値を使って、
![]()
この式より、Ra と Ke を求めます。
![]()
![]()
となります。
● 電流とトルクの関係
同様に、電流とトルクの関係式(2)より、無負荷時とストール時の値を使って、
![]()
この式より、λm と Rm を求めます。
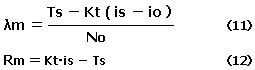
ここで、Kt はカタログ値を用いて(4)と(8)式より求めることができます。
■ 計算例
ちなみに、いろいろな小型DCモータのデータシートをネットから読み取り、それぞれの計算を実施してみました。
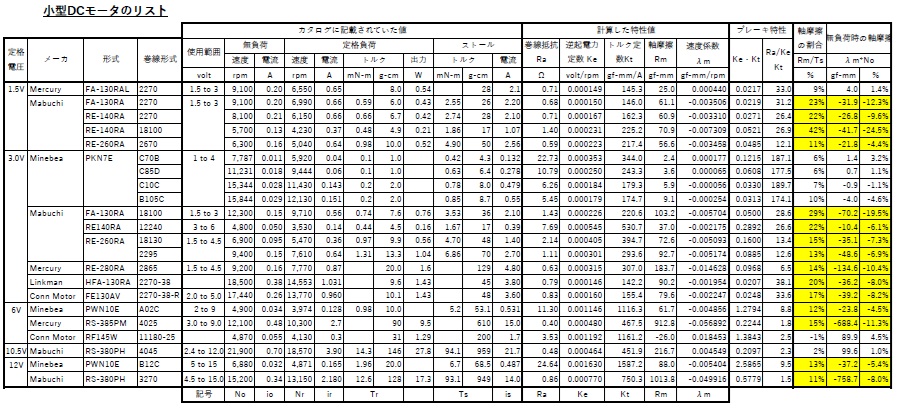
PDFファイル:DCmotor-List.pdf
一応は計算したものの、疑わしいデータがいっぱいあります。
参考として、自分が今まで実測してきたNゲージ用モータのデータと比較しながら考察してみましょう。「モータ特性の測定とモデル化 特性解析のまとめ」(2019/5/26)参照してください。
ちなみに、上の表の右端に示した欄には、出力トルクに対する軸摩擦トルクの割合を計算させています。すると、20%を超えているものが散見されます。また、軸摩擦トルク値も今まで測定してきたの例からもかなり大きい値を示すものもあります。そして、速度係数に至ってはほとんどの値がマイナスであり、高速回転になるはど減少していることになるのです。
 .
.
● ブレーキ特性について
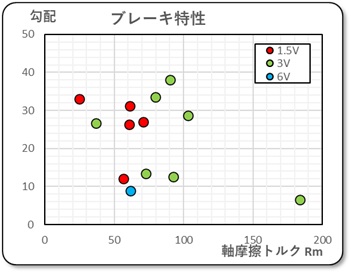
目的としたブレーキ特性を示す係数についても計算しました。外部抵抗の Rb = 0 の場合を想定して、Ra/Ke・Kt の勾配としての値を計算しました。さらに、この勾配の値を縦軸にし、軸摩擦トルク Rm の値を横軸にして右のようなグラフにしました。但し、異常に大きな値のデータは表示していません。
DCモータを発電ブレーキ用として使用する場合には、摩擦トルクが小さく、かつ勾配が小さい方が使い良い事を先回の報告で検討しましたが、右のグラフから4個の候補が考えられます。それは、Mabuchi製のRE-260RAの3仕様のモータと、Minebea製のPWN10Eのモータでした。
本当かな?・・・・・・・・・・とまだ半信半疑の状態です!
■ まとめ
せっかく グッドアイディア と思った解析でしたが、あまり参考にはならない様です。これは有効数字の問題と考えていますので、データシートの値が疑わしいという意味ではありません。誤解の無いようにお願い致します。
また、カタログを見ていた気が付いたのですが、外見や形式番号が同じでも、巻線仕様によっては性能が大きく変わってしまうと言うことです。当然な事ですが、もしストック品を使用しようとした場合には気を付ける必要がありますね。ストック品の中には、品番、メーカ名、形式番号などが全く記載されていない物もあります。
でも、ホビーで使用する場合には、ブルーンと回ればよい場合が多いので気にする必要はないようです。
**********************************************
次回は、上記の考え方が正しいのか実験して確かめて見ることにしましょう。まずは実験装置の準備からです。