
HOME >> 鉄道模型実験室 > 抵抗挿入による特性の改善
鉄道模型実験室 抵抗挿入による特性の改善
■ はじめに
鉄道模型、特にNゲージにおいては、列車編成を組む場合、モータ車は一般的に1台だけしか使用しない。 それは、2台以上のモータ車を編成内に組み込んだ場合、その動きがギクシャクする恐れがあるからである。 いわゆる「協調運転」と言われている機能が要求されるからである。 その内容は、「重連特性を考える」で検討したが、解決策として最も有効な方法である、“重連させる車両の速度を合わせること”、 即ち、二つの車両の速度を何らかの方法で合わせるようにする事である。
複数の車両の速度を合わせる方法として、DCCシステムを導入すれば良いが、高価で手が出せない領域である。 そこで、昔から行われている “モータと直列に抵抗を挿入する” 方法で速度調整した場合、車両特性がどのように変化するのかを検討する事にしよう。
この速度調整のねらいは、協調運転だけではない。 わがミニレイアウトに組み込んだ自動運転システムでもニーズがある。 TOMIXの「TCS自動運転ユニットN」を用いてモード7などの2列車交互運転モードを楽しむ場合、二つの列車の速度を合わせておく必要があるのである。 一方の列車がのろのろで、他方の列車がビューンビューンでは、自動運転の楽しみが激減してしまうからである。
■ 動力特性の検討
モータ車両において、モータと直列に抵抗を挿入した場合の回路を右に示す。 「鉄道模型工学概論」で示した数式を活用するため、記号をそのまま流用する。 このため、電源電圧を新たに Ec と 定義し、挿入する抵抗値を Rx 、流れる電流を I とすると、抵抗による電圧降下 Er は、
![]()
そして、電圧 Ec は、
![]()
となる。 ここで、モータに掛る電圧 E と電流 I は 鉄道模型工学概論の式が成立するので、式(11)、式(12)、式(14)より、モータトルク Tm は、
![]()
となる。 この式を、式(17)と比較してみよう。 すると、
Ra → Ra + Rx
E → Ec
に置き換わったいるだけである事が容易に分かる。 考えてみたら当然であり、他の特性も、Ra を(Ra+Rx)に、E を Ec に置き換えて考えれば良いことを理解できるであろう。
特性図を理解するため、実際の実験データで説明しよう。
■ 実験とその結果
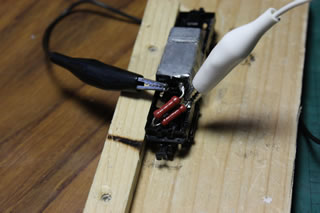
実験に使用した車両は、「12m級のEF58の製作」で紹介した車両を使用した。 また、「走行中の電流を測る」でも実験しています。 この車両をリニューアルし、LEDは撤去しています。 動力は12m級の鉄コレ動力を使用している。
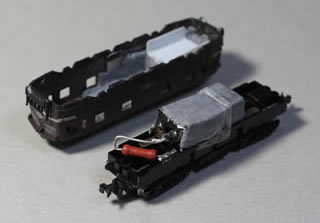

左の写真は、12Ωの抵抗をひとつ、右の写真は、12Ωの抵抗をふたつ、モータと直列に挿入した状態です。
使用した1W酸化金属皮膜抵抗.の部品は、 メーカー はTDO、 型番:1WサンキンR12Ω、 抵抗値: 12Ω、抵抗許容差: ±5%、温度係数: ±200 、定格電力: 1W 、寸法: 11mm×φ4.0、使用温度範囲: −55℃〜200℃ です。
まず、単機走行での速度特性を、抵抗なし、12Ωの抵抗をひとつ挿入、12Ωの抵抗をふたつ挿入の三つの状態で測定した。 測定装置は、「定置実験装置の製作」で紹介した装置を使用した。
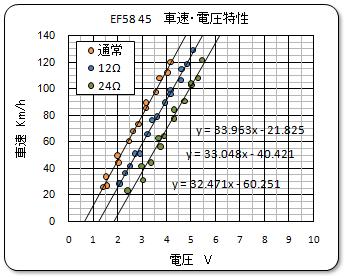
まず、車速・電圧特性を見てみよう。
電圧 3.0 Volt でのスケールスピードは、抵抗を挿入することによって、80Km/h から、60Km/h 、40Km/h へと減少している。 同じスピードを維持するためには電圧を上げる必要がある。 そして、車速と電圧の関係は抵抗を挿入することによって、右にほぼ平行移動していることが分かる。
事前には勾配も変化するものと思っていたが、殆ど変化していない。 このことは、低速域でも同じ様に平行移動するため、走り始めの電圧が高くなる事を示している。 この傾向は、望ましいものではなく、少し期待外れであった。
この速度特性を表わす数式は式(24)と式(25)である。 ここで、Ra を(Ra+Rx)に、E を Ec に置き換えて考えて見ると、Vo/Ec項での勾配は、Ra+Rx の影響が少ないのに対し、Eo に対するRa+Rx の影響は殆んど比例的である。(他の実験で Eb はほとんどゼロと考えてよいことが分かっている) これは、測定データの傾向と合致している。
抵抗挿入によって速度を調整する場合、この特性を平行移動させる事は出来るが、勾配までは調整は難しい。 このため、勾配の異なる車両同士を協調させるときは、ピンポイントでしか協調させる事が出来ないことを認識しておこう。
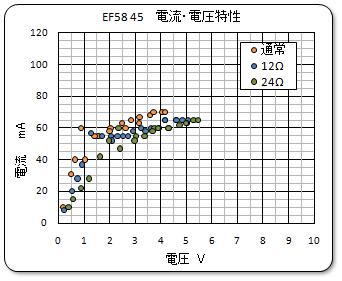
特性線の平行移動量は、右の電流のグラフからも簡単に計算できる。
抵抗挿入が無い場合のスケール速度 80Km/h での電圧は、 3.0 Volt である。 このとき、モータの電流は 65mA 流れている。 そこで、24Ωの抵抗を挿入すると、抵抗での電圧降下は、24Ω×65mA=1.6 Volt であるため、供給電圧は、3.0 Volt+1.6 Volt=4.6 Volt 必要となる。 測定データのバラつきも考慮すると、実験データと合っていることが分かる。
次に、電流・電圧特性を見てみる。
モータが回転していない状態では、式(27)でも示すように、挿入抵抗値が直接影響するので、その勾配が変化している。 一方、モータが回転している状態では、式(28)に示すように、各要素が関係して良く分からない状態となる。 モータ単品状態でも測定して見たくなった。
次に、牽引力特性の測定を実施した。 電圧は 3.5Volt の一定状態で測定している。
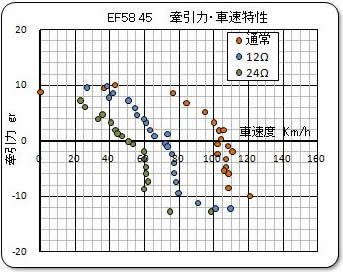
牽引力・車速特性を見てみる。
挿入抵抗が大きくなるにつれ、車速が低下するのは、前記のとおりであるが、牽引力/車速の勾配もやや倒れている。これは、牽引力の式(20)を見ても理解出来るが、勾配の変化は思ったよりも小さかった。 また、粘着限界は、他の要素で決まるので抵抗挿入とは無関係である。
なお、車体の重量は、水草の重りをしっかりと詰め込んでいるので、Wo=54.9 グラムとかなり重い。 また、前方の台車は非動力輪で、荷重は18.0 グラム、後方の台車はゴム輪付きの動力輪で36.9 グラムの荷重が掛っている。 このように動力輪に有効に重りが掛るようにしているため、鉄コレ動力でも、約10 グラムの牽引力を出す事が出来ている。
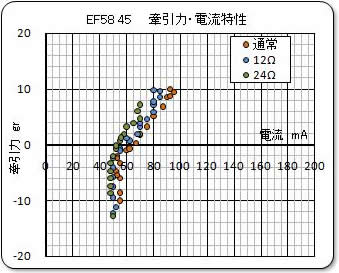
牽引力・電流特性
また、牽引力・電流特性を見ると、特性式(21-1)に示すように、Ra は牽引力/電流の勾配に影響するのみである。抵抗が大きくなると勾配が大きくなるのも測定データは明確に示している。 ここで、牽引力が最大のときは、80〜100mA の電流が必要であることに注意しておこう。
無負荷での単機走行時では、60〜70mAであったが、負荷時では100mA程度必要となる。 従って、挿入した抵抗では、 100mA×100mA×12Ω=0.12 ワットの電力を消費することになる。 今回、定格電力が1W の抵抗を用意したが、大き過ぎた様である。 1/4 ワットの抵抗でも充分そうである。 モータによっては、200mAも消費するものもあるので、事前に電流測定をしておく事をお勧めする。
■ まとめ
- モータと直列に抵抗を挿入することにより、速度を遅くすることが出来るが、車速・電圧特性は平行移動するのみであった。 従って、使用する運転領域を決めて値を設定する必要がある。 ある人が実施していた可変式の抵抗器は有効な手段かも知れない。
- 今回の EF58 45 号機は、 12m級の鉄コレ動力を使用しており、速度は速い部類に属している。 24Ωの抵抗を挿入することにより、4.0 Volt の電圧設定時には、スケール速度が 120Km/h から 70Km/h まで減速させることが出来、他のS系電気機関車と同等の速度とする事が出来た。 そして、ミニレイアウトでの自動運転を楽しむ釜を増やす事が出来た。
■ 追加実験
ついでに、モータ単品での電流・電圧特性と駆動系の摩擦抵抗も測定してので報告する。
モータ単品での電流・電圧特性
車両の減速機構であるウォーム・ホイールを取り去り、モータとジョイント、およびウォームのみを回転させて、電流・電圧を測定した。 車両は走行させる必要がない(走行出来ない!)ので、電流計と電圧計を組み合わせて実験する。

電圧はある程度安定しているが、電流はやや不安定なのでアナログ式の計測器をあえて用意した。 アナログ式の方が読み取り易いのである。 モータの発熱状態を考慮して、3分間の運転の後に測定を開始した。
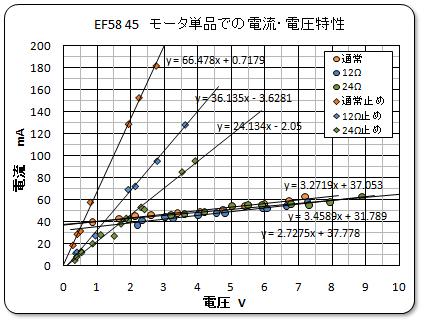
モータ単品状態での特性式は式(30)と式(27)で示される。 単品状態と言っても、モータ軸にはジョイントとウォームも連結している状態である。 そして、「止め」の状態では、モータ軸を手で押さえて強制的に回転を止めている。
上記のグラフに示すように、モータが回っていない場合は挿入抵抗によって勾配が変化しているが、回転状態ではほとんど変化がない。 この時の回転数を測定すればもっと詳しい事が判明するが、それなりの専用の装置や測定機が必要となってくるので、今後の課題としよう。
また、電圧が増加するに従って、電流も少し増加している。 これは、速度に比例する摩擦や空気抵抗などが存在するためと考えている。 このデータは、トルク損失の式(6)のモータ軸回りの摩擦損失トルクを示す上側の負荷状態である。 そこで、ここまで測定したのなら、式(6)の下の式、即ち駆動軸回りの損失トルクも測定したくなる。 でもそう簡単ではないので、従輪の走行抵抗までの含めた走行抵抗を測定してみることにした。
減速部と車輪の走行抵抗
再びウォーム・ホイールを組付け、今度はウォームを取り去った状態で抵抗を測定することにした。 しかし、モータとジョイントは組付けた状態であるが、回転力は車輪に伝わらないので自分で走行出来ない。 そこで、回転円盤を使用して走行状態を作り、カプラー部から糸で引っ張って荷重計に乗せた重りと結び、その荷重変化で走行抵抗を測ることにした。 測定状態は下記の写真に示す。 円盤は上から見て左回りに回転させ、回転計でその速度を読んでいる。



また、速度ゼロ相当の状態は、上記の写真のように、いつもの傾斜装置で転がり出す傾きを調べて、微低速での走行抵抗とした。
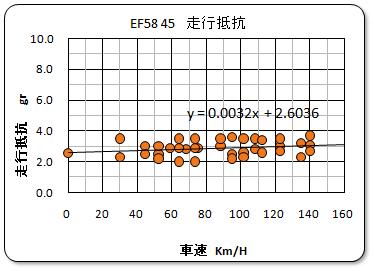
その測定データを右に示す。 走行中の抵抗が2から4グラムと、大きく振れ、こんなに振れるのかと驚いてしまった。 線路の継ぎ目の影響なのか、線路の設定状態が均一でないのか、あるいは、台車の状態なのか、車輪の軸受けの影響なのか、いろいろ疑問がわいてくる。 とにかく荷重計のデジタル表示値を読み取るのに苦労した。 とりあえず最大値と最小値、および中央値らしき値を、エイヤーと読み取っている。
とにかく、色々な車両のデータを測定する必要がありそうである。 また、宿題が出来てしまった。
データを眺めていると右上がりに上昇している様にもみえるが、速度の影響は少ないようである。 しかし、トレーラ車の走行抵抗と比べて大きく、ひとケタも違っている。 それは減速部の歯車の影響が大きいのか、車輪に掛る荷重が大きいからなのか、不明であり、ここにも課題が残ってしまた。
![]()
今回の実験で、確認出来た事もあるが、新たな疑問も出た来てしまった。 自分ひとりで楽しんでいるようでもあるが、皆さんの鉄道模型知識として、参考になれば幸いである。