
鉄道模型実験室 テスト車両を走らせる
■ はじめに
改良を進めていた動力車の自動性能測定装置について、何とか測定が実施出来るようになったので、実際にテスト車両を走らせ、どの様なデータが収集され、その収集された測定データがどの様なデータになっているのか検証してみることにした。
.
■ 測定車両と測定装置の実際
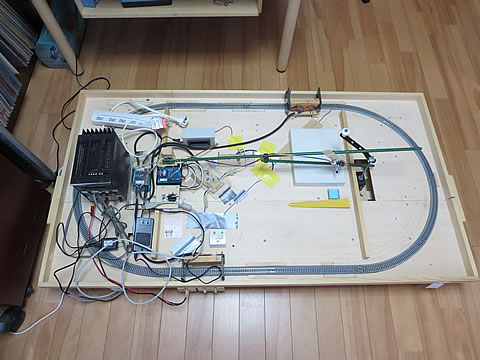
まず、測定車両の状態をまとめておこう。 測定対象のテスト用動力車に測定車両を連結した状態を下に示す。 先頭の車両がテスト車であるが、車体部分は外してあるというのか、動力部分だけを以前にオークションで入手したをものであるので、最初から無いのである。 フレームは「3010」の刻印があるので、1989年に発売されたEF81系であり、台車の部品は「3023」の刻印があるので、1997年に発売されたEF64系の動力装置の様である。
ちなみに諸元を調査すると、ギヤ比は i = 19.0、動輪直径は D = 7.4mm であった。 そして、車両重量は、92.2 グラムであった。 先頭部分には光ゲートを確実に通過出来るように、ウレタンピースを貼りつけている。 モータのフライホイール部分には、白と黒のマーキングを実施しているが、1回転当たり2回のパルスが出るように塗ってある。 そして、その部分の上に回転センサーをセロテープで止めている。 また、モータ端子部のには、プラスとマイナスの測定用電極を差し込んでいる。 当然進行方向の右側がプラス極である。 そして、これらの信号線を後ろの測定車両まで引いている。
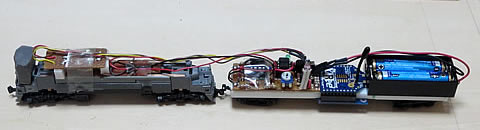

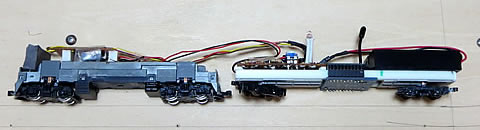
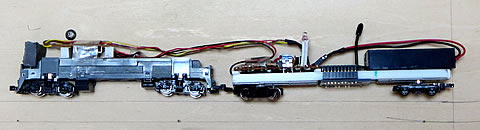
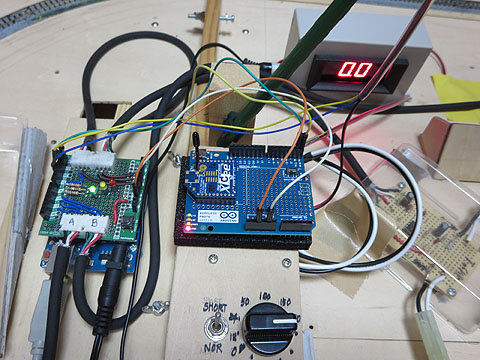
後ろの測定車両には、オペアンプやタイマーICを乗せた測定用基板と、無線通信のXBeeモジュールと、単4電池をいれた電源部を搭載している。 この測定車両の重量は、58.5グラムで、傾斜方式で走行抵抗を測定すると、0.8 グラムであった。
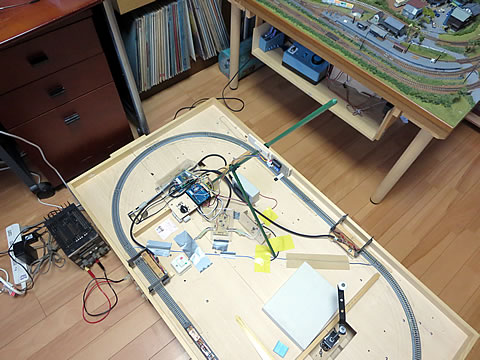
次に測定装置を説明しよう。 下に装置の全貌を示す。 今回の追加工事では、無線通信用のシールドを追加しているが、現在はリード線で接続している。 今後はシールドを積み重ねる予定である。 そして、赤外線通信の受光部として測定台の上方にサテライト・ユニットを園芸用支柱で支えている。
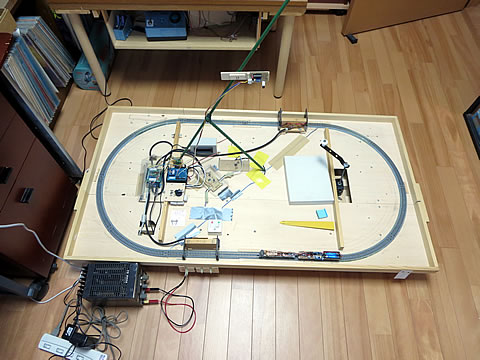
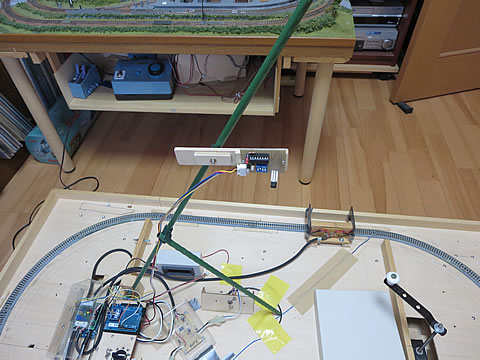
これらの拡大を上に示す。 また、このサテライト・ユニット部分は支柱を折り畳むと、ほぼ平面的になるため、ミニレイアウト「遥友鉄道」の下に潜り込ませ、一時的な保管場所として活用している。 これは、測定終了後に実施する整理・整頓の習慣でもある。 長期にわたっての保管は、重要な部品や邪魔になる部品を外して壁に立てかけて部屋のスペースを確保するようにしている。

装置がだんだんグロテスクになって来たが、見栄えは 「2の次」 なので許してもらおう。 我が工作も、中学生レベル? いや高校生レベルと自認しており、動力特性を理解するという “変な鉄道模型の楽しみ方” を楽しんでいるのである。
■ 測定データの処理
Arduino から送信された測定データをパソコンが受け取ると、そのデータをEXCELに取込み、計算処理してグラフ化する。 その計算式について説明しておこう。
まず、モータの回転数と車速の関係を検討することにしよう。 モータの1回転当たりに Q 回のパルスを出し、モータが Nm rpm の回転数で回転している場合に、 1msec の間に出すパルスは、
Nm * Q/(60 * 1000) 回/msec
である。 そして、 Tp msec の間には、Tp * Nm * Q/(60 * 1000) 回のパルスを出すことになる。 カウントする指定のパルス数を P 回と設定すると、
P = Tp * Nm * Q/(60 * 1000)
となり、 ここからモータ回転数 Nm rpm を求めると、
Nm = 60,000 * P /( Q * Tp)
として、 モータ回転数を求める事ができる。
また、動輪とレールの間で滑りが発生しないとした場合、モータ回転数と車速の関係は、車速を v mm/min 、ギヤ比を i 、動輪直径を D mm とすると、
Nm = v * i / (π*D)
となる。 ここで、車速 v mm/min をスケールスピード Vo Km/h に換算すると、N ゲージの縮尺比を1/150 として計算すれば、
Nm = 35.37 * Vo * i /D
実際には、動輪とレールの間で滑りが発生しているので、この滑り状態をスリップ率をβとして定義しよう。 「車両の静的特性のモデル化と特性解析 その1」 参照。
スリップ率 β = 1 - 車速/スリップゼロの時の車速
となる。 測定された車速を V Km/h とすると、
β= 1- V/Vo ∴ β= 1 - 35.37 * ( i / D ) * ( V / Nm )
i / D はその車両の固有値であるので、結局は 車速とモータ回転数の比で計算される。
◆ 速度特性のデータ
これらの計算式を使ってEXCELのシートを追加修正した。 まず、平坦路で走行した時の速度特性の測定の場合を下に示す。

 .
.
ENDの欄までは、シリアル通信で送られたデータを挿入し、その値を用いて自動的に計算し、グラフにプロットするようにしている。 今回はデータ欄として、「モータ端子電圧」と「tp」の欄を追加し、計算の欄は「M平均」以降の欄を追加した。 M平均は、10個のモータ端子電圧値の平均値であり、その平均値とMAX値とMIN値の差をMバラツキとして計算している。
この値が大きい時は欄を赤色表示とし、モータ端子電圧の異常値を見つけ出して、データ値に「#」マークを付けて値を計算除外するようにする。 少し手間が掛るが、もう少し工夫をしたい。 また、どれだけの異常値を除外対象とするかも、今後の課題とする。
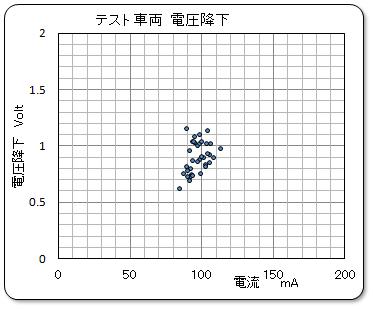
この計算結果をもとに電圧降下量をグラフ化したものを右に示す。 先回報告したように、1ボルト弱の電圧降下が発生しているようである。
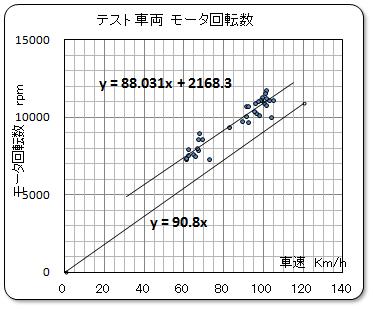
次に、モータ回転数の計算結果を下左のグラフに示す。 そして、スリップ率をゼロとした場合の値を計算して同じグラフに表示させてみた。 それが y = 90.8x で示された直線である。
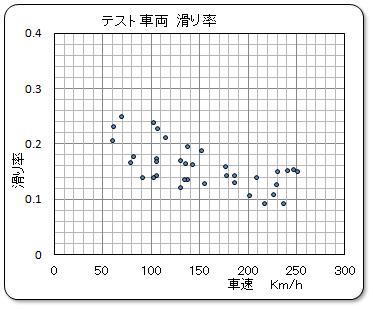
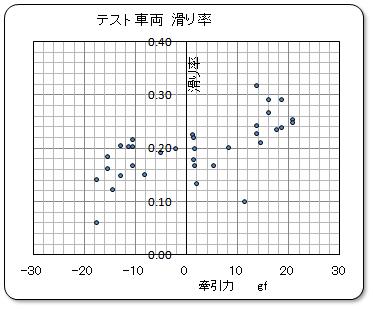
グラフからは、モータはかなり余分に回転しており、ギヤ関係では歯飛びがゼロなので、車輪がスリップしていることになる。 このスリップの大きさをスリップ率として計算し、横軸に車速に取った場合をグラフ化したのが下右のグラフである。
このグラフより、スリップ率が10〜20%もある事を示しているが、思ったよりも大きな値である。

◆ 牽引力特性のデータ
次に、測定台を傾けて、牽引力を測定する。 注目したいポイントは登り坂と下り坂でのスリップ率の変化である。 まずEXCELの計算シートを下の様に修正した。

 .
.
追加した欄は速度特性の場合と同じであるが、Mバラツキの欄を%表示に変えてみた。
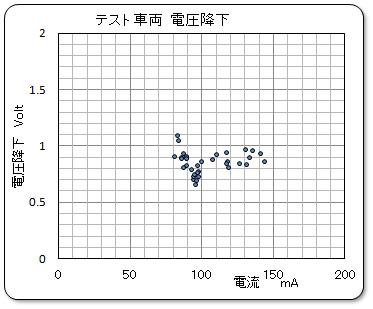
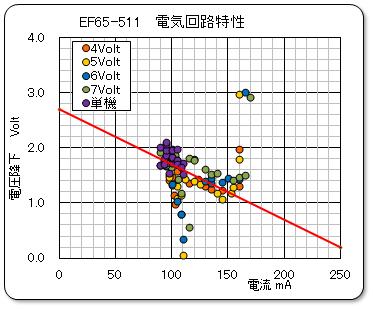
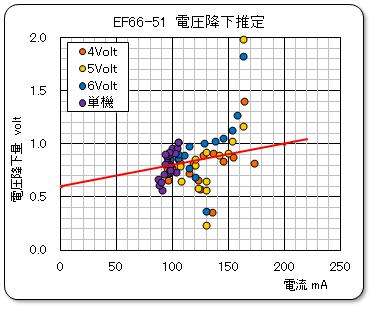
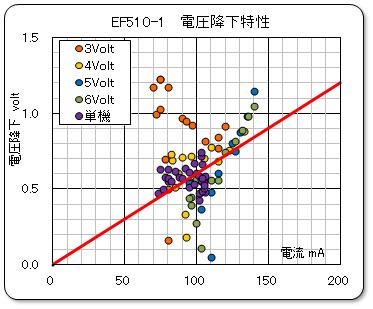
まず、電圧降下量の測定結果を右のグラフに示す。 電流値による変動は少ないようである。 モータ回転数と車速の関係、およびスリップ率もグラフ化したものを下に示す。
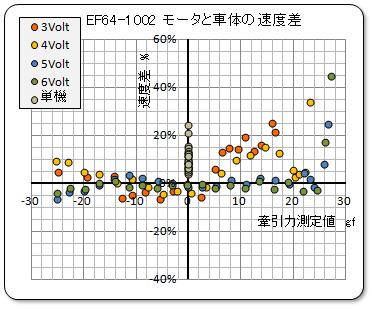
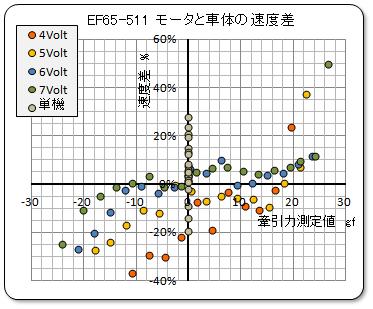
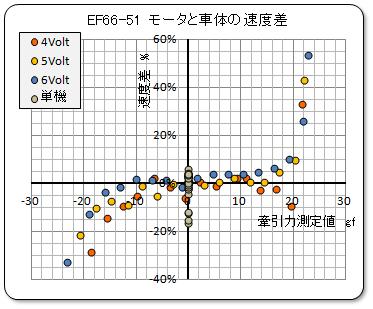
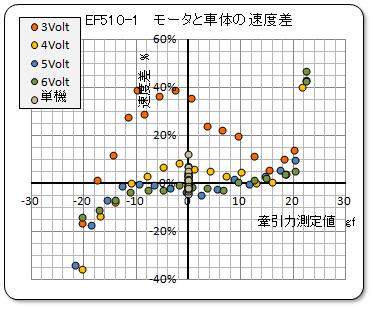
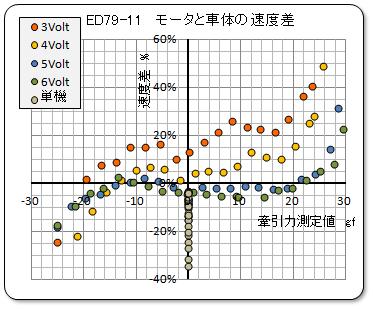
牽引力特性の場合は、登り坂と下り坂でスリップ率が変化するはずなので、これらのグラフも速度特性の場合とは異なるパターンとなるはずである。 特に、スリップ率を牽引力に関係するはずなので横軸にその牽引力と取ってスリップ率をまとめてみた。 下右のグラフ。
牽引力がプラス側の場合は上り坂で発生しており、車輪のスリップは増加するはずである。 下り坂の場合は、その逆となり、スリップ率は減少するはずであるが、グラフはその様子を明確に示している。
しかし、全体的に高い値で有り、速度特性とのデータとは矛盾しないものの、やや疑問のあるデータとなっている。
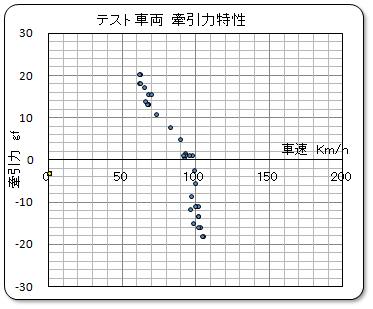
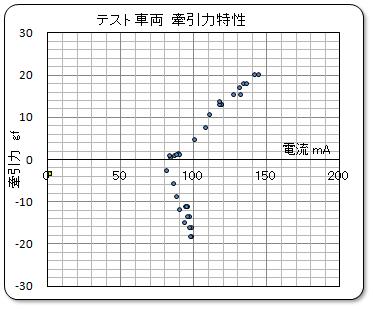
次に、今までと同様に牽引力と速度、牽引力と電流との関係もグラフ化したものを下に示すが、従来と同様なパターンを示しており異状は認められない。 ただ、スリップ領域には入っていないものと推察される。
■ 従来のデータとの比較
以前に検討した、電圧降下とスリップ率の状態をグラフ化したデータがあるので、この時のデータと比較しよう。 ただし、この時のデータは、電圧降下量とスリップ量を直接測定したものでは無く、他のデータから推定計算したもので、今回の測定を始めるきっかけを作ったグラフである。
そのグラフは、「鉄道模型 動力車の調査」で実施したもので、計算方法については「車両の静的特性のモデル化と特性解析 その2」で説明していまうので、こちらを参照ください。
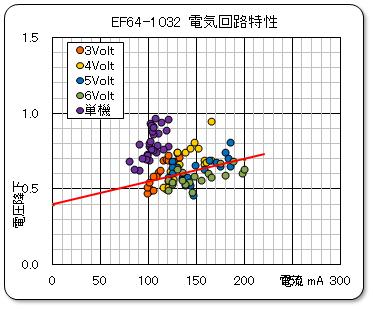
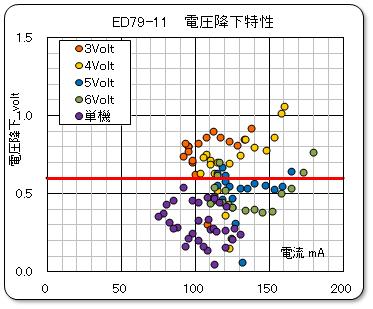
これらのデータを比較すると、電圧降下量については、ほぼ同じ値を示しているので、今回の測定方法は合格と判定出来そうである。
課題は個々のデータのバラツキであり、後処理の手間が面倒である。 このため、モータの発生するノイズや変動を少しでも滑らかにするために、コンデンサの容量をいろいろ変えてみて測定してみようと考えている。 今回は、10μFではデータがおかしくなったので、もっと小さい容量にしてみよう。 ちなみにBトレ用のKATOの2軸動力ユニットでは、0.1μFのコンデンサを使用しており、河合の小型SLでは、0.022μFのコンデンサなので、この程度の容量であったら、悪影響なく効果が出るかもしれない。
次に、スリップ率のデータであるが、判断に苦しむ様相となっている。 もう少し信頼性のあるデータが得らると期待していたが、似たい寄ったりのデータとなっている。 ゼロ・パーセントを中心に、駆動側ではプラスに、制動側ではマイナスに振れておれば、すぐさま信用するのであるが、屁理屈通りとは行かないようである。 この判定はもっと多くのデータから考察する必要があるようである。
******************************
念願の走行中のモータ端子電圧とモータ回転数を計測出来るようになったので、今後は、以前の測定車両も含めて、測定実績を増やしていこう。