
HOME >> 鉄道模型実験室 > パワーユニットを知ろう PWM制御とコアレスモータ その2
鉄道模型実験室 No.136 パワーユニットを知ろう PWM制御とコアレスモータ その2
.
■ はじめに
パワーユニットを知ろう の第9弾として、TOMIX製パワーユニットN-1001-CL を使った場合のコアレスモータの特性を解析してみた。 その結果、自分なりの屁理屈をまとめてみて、何だか理解出来たような気がしたので、ここに報告する。
■ パルス波形の変化
PWM制御のパワーユニットによってコアレスモータを駆動した場合のモータ特性について、前のレポートで報告した。 しかし、何故そのような現象を引き置きしているのかは判然としないのである。 そこで、もう少し視点を変えて検討してることにした。
そして変化の具合を視覚的に観察するために、特性の動きをオシロ画面を並べた動画にしてみた。 モータの状態は無負荷とある程度の負荷のある場合で、パワーユニットのダイヤルを少しずつ回した状態において、変化が落ち着いた時のオシロ画面を記録していき、それをスライドとして動画ににした。 ダイヤルを回している状態そのものを動画にしている訳ではありません。
まず無負荷状態の時の波形の変化です。
次に負荷状態の時の波形の変化です。
ユニットのダイヤルによってデューティ比が変化することによって、電圧と電流の変化が分かり、さらに無負荷の時と負荷のある状態の違いも認識できます。
■ モータの特性
最初にこのコアレスモータの特性を復習しておこう。 使用したモータはKATO製のC56-149号機であり、その静特性は安定化電源で測定済みである。 そのデータも既にここで活用済みである。
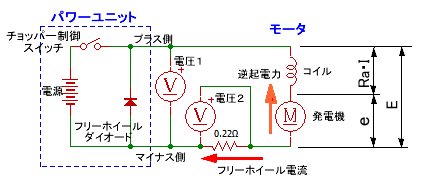
外部電圧を E とすると、巻線抵抗を Ra とし、ブラシ接触部の電圧降下を微小とすると
![]()
となる。 そして、逆起電力を e は、モータの回転数を Nm 、逆起電力定数を Ke とすると
![]()
で表される。 即ち、外部電圧 E は、電流と回転数に関係してくる。
巻線抵抗と逆起電力定数は既に想定済みであり、その値は
巻線抵抗 Ra = 39.2Ω
逆起電力定数 Ke = 0.000484 volt/rpm
である。
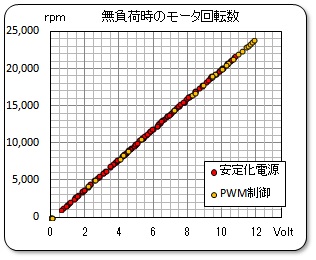
左のグラフは、外部電圧、電流、回転数の関係を測定データよりグラフ化したものであるが、供給される電源の違いは認められず、外部電圧と回転数の関係が綺麗な比例関係にある事が分かる。 その勾配から計算されたのが上記の逆起電力定数なのである。
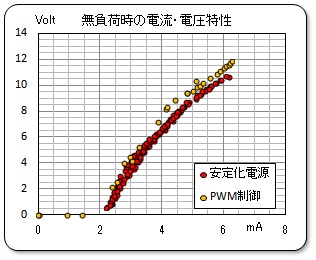
次に、電圧と電流の関係を見ると、巻線抵抗による電圧降下量は、電流との積であるが、
電圧降下量 = 39.2Ω×0.006A = 0.20 volt
である。 上左のグラフを眺めると、電圧の値がこの計算した値とかけ離れていることが分かる。 これは、外部電圧 E の値は、殆ど逆起電力に対応した値であることが分かる。 即ち、コアレスモータに電圧を掛けても、逆起電力に反発されてほとんど電流は流れないのだと言える。
■ モータの違いによる制御特性の変化
次に、負荷となるモータの形態によって、PWM制御された波形がハッキリと異なっていたが、その違いによってどの特性に影響しているのか検討してみた。
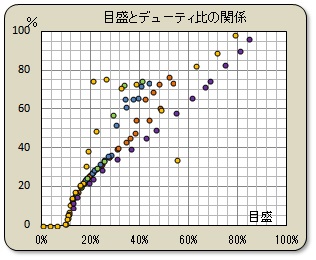
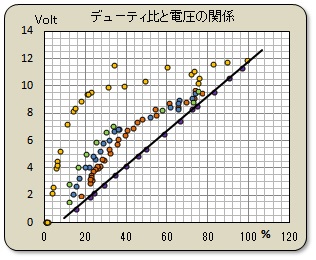
まず、パワーユニットの特性として、ダイヤル目盛と出力されたPWM制御のデューティ比の関係を見てみよう。 上左のグラフ。 デューティ比はオシロ画面に記された値を転記したものであるが、無負荷の場合のデータは一部波形が乱れているためにバラツイテしまった。 失敗データとして無視してください。 このグラフより、ダイヤルの回転量とデューティ比はほぼ比例し、モータの違いによって影響されていないと言えるであろう。
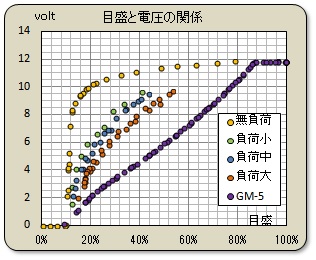
しかし、このデューティ比と電圧の関係ではモータの違いが大きく出ている ことが分かる。 上中央のグラフに示す。 そして無負荷回転の場合は特に離れている。 このため、上右に示した電圧と目盛の関係もその影響が出ている。 パワーユニットは電圧を直接制御していないので、原因はデューティ比と電圧の間にあるとするべきであろう。
では、何故 ここで違いがでるのだろうか?
その問いを解くカギは、コイルのインダクタンスにあると赤津先生の解説本では示唆されていたので、そのインダクタンスについて勉強しておこう。
■ インダクタンスの働き
ネットで検索するとあの有名なTDKのサイトで分かり易く説明されていた。 特に、TDK Techno Magazine : Tech Mag のページでの解説は素人には理解しやすかった。
http://www.tdk.co.jp/techmag/electronics_primer/index.htm
この中の、
インダクタ編 No.2「インダクタの基礎知識(2)」には、ON/OFF 時での働きを開設していた。 また、「スイッチング電源のエネルギー伝達を支える電子部品」では、コンデンサばかりでなくコイルもエネルギーを蓄えることを絵入りで解説されていた。
特にチョークコイルの基本性質の解説図を見て、したり! と納得したのである。
そこには、コア入りのコイル(チョークコイル)の回路に於いて、スイッチをOFF した時の説明が記されていた。 「スイッチOFFにした瞬間、コイルの自己誘導作用により起電力(電圧)が発生する(電流を流し続けようとする)。」と説明されていた。
電流は同じ方向に流れることと、あの起電力の表現ではあるが、逆起電力とは言っていないぞ!・・・・・と納得したのである。
ここで流れる電流は、モータの場合ならばフリーホイール電流に相当するのだ。 モータの発電作用による起電力とは反対方向なのである。
そして、このインダクタンスを大きくする方法として、「透磁率の高い磁性体をコア(磁心)とすることで、空心のコイルより格段にインダクタンスを大きくすることができます。」とのことですの、コアレスモータと鉄心付きモータの違いは、このインダクタンスの大きさの違いと改めて認識しました。
コアレスモータでは早い電流変化に対応出来るが、鉄心付きモータではその対応が追いつかない。
そして、PWM制御では、20kHz もの高周波領域で制御せれているので、この違いが明らかに表れていると理解した。
■ デューティ比と電圧の関係
何とか現象を理解出来るようになったので、まとめおこう
- 1)電圧は高いだけでは仕事をしたことにならない。
- 電力は電圧×電流で表され、電流が流れなければ仕事をしていないのである。 従って、モータの特性を考えるときには、電圧が高い事だけに注目してはいけないのだ。 同時にどれだけ電流が流れているかも念頭に置いておくこと。
- 2)コアレスモータと鉄心付きモータの違い。
- 上記にも記述したが、コアレスモータでは早い電流変化に対応出来るが、鉄心付きモータではその対応が追いつかない。
- 3)コアレスモータと鉄心付きモータの波形の違いを見ておこう。
- 先の報告でその違いを示しておいた。 「PWM制御とコアレスモータ 波形観察」参照。 特に電流波形に注目してください。
上に示す中央のグラフに於いて、デューティ比が20%程度の場合を仮定する。 無負荷状態で回転しているコアレスモータの場合には波形からも分かるように、
- 電源がON状態のときは電流が素早く上昇しており、モータに電力を供給している。
- 電源がOFFになると電流は急激に低下してゼロ(近く?)になってしまう。 このフリーホイール電流が消滅することによって、フリーホイールダイオードからも電流は流れ込まない。 即ち、モータのプラス側回路は電源部などと遮断されているので、電圧測定部にはモータの逆起電圧だけが示されることになる。 しかし、電流がゼロなのでこの電圧は仕事をなしていないのである。
- モータは電源がON状態のときだけに供給された電力で回転を継続している。 そして、電圧、電流、回転数、トルクの関係はバランスした状態で保持されている。
次に、モータに負荷がかかった場合を想定する。
- モータに掛かった負荷によって回転数が低下する。
- 回転数の低下によって、逆起電圧も低下するので、モータに流れる電流が増加する。 (上記の計算式に従うのだ)
- 電源がON状態のときは一定だるが、電源がOFFの電圧が低くなるので、計測される平均電圧は低下するのである。
- しかし、ON時の電流はアップしているので、モータに供給される電力は増加しており、増大したトルクに対応して仕事をしているのである。
鉄心付きモータの場合を考える。
- 電源がONになっても、大きなインダクタンスのために電流は緩やかに増加する。
- 電源がOFFになってもコイルの自己誘導作用により電流は流れようとするが、モータの逆起電力との兼ね合いでゆっくりと低下していく。
- この時発生した電流は、電源回路が遮断されているので、フリーホイールダイオードを通過し、モータのプラス側電極に還流する。
- この時、ダイオードの抵抗によって、電流の上流側と下流側には電圧差が発生する。 測定のゼロ点は電源のマイナス側として計測しているので、下流側になる電圧測定部はマイナス電圧を表示する。 ダイオードの特性上、電流の大小にかかわらず電圧差は一定の1ボルトを示す。 こればOFF時の電圧波形に現れる。
- 測定部の平均電圧は、このONとOFFでのはっきりとした矩形波電圧の平均を示すので、デューティ比とは比例する値となるのである。
- モータを駆動するトルクは電流に比例するのであるが、電圧状態とは無関係であるかのように、三角波の波形ながら一定の電流を流し続けてモータを駆動しているのである。
■ 鉄心付きモータとの特性の違い
先回報告したモータ特性について、鉄心付きモータとコアレスモータの違いを理解しよう。
- 1)ダイヤルの回し具合(目盛)によってモータ回転数の変化が大きく違っているのはなぜか?
- 鉄心付きモータでは電流の応答が遅いので急激なON/OFF制御に応答できない。 このため応答はON/OFF制御の平均された値に従うことになる。 一方でダイヤルの目盛とPWM制御のデューティ比は比例しているので、回し具合と回転数は、ほぼ比例するなだ。
コアレスモータの場合は電流の応答が早いので、デューティ比の小さい領域でのチョンチョン回しでも充分に電力を供給して回転数を上げることが出来る。 - 2)負荷を上げるとコアレスモータの方が早く速度ダウンするのはなぜか?
- ギヤ比や動輪径の違いがあるので、モータ単体ではなくて車両として比較する必要があるが、モータ単体での比較を考える。 その違いは電源がONになった時点での電流値の違いが影響しているとみている。
コアレスモータの場合は、電源OFF時には電流がゼロまで落ち込んでいるので、ONになった時点では常にゼロスタートである。 そこから負荷に対応した電流値まで上昇させていかなければならないが、電流が素早く応答すると言えども反応しきれないはずである。 このため、回転数を落として逆起電力を下げ、コイルの両端に掛かる電圧を上げてコイルに流す電流を増加させる必要がある。
鉄心付きモータの場合は、 電源OFF時でもだんだん低下していくとは言え電流が流れている。 このため、ONになった時点でも少し低下した電流から上昇させればよいので、回転数をあまり下げずに必要な電流を確保することが出来るのである。
■ まとめ
自分なりの屁理屈をまとめてみて、何だか理解出来たような気がする。 正しく理解しているかどうかは自信がないが、ホビーとして楽しんでいるのでこれで充分と考えている。
また、PWM制御方式であるパワーユニットとコアレスモータとの相性が悪いと言われていたが、昔報告した「KATO C62 2 とパルス制御式パワーパック」 (2011/12/5)にて経験した程度で、それ以降はほとんど気にしたことは無い。 少し注意しておればよい事なのである。 それよりも、ゆっくりと静かにスタートさせることが出来るメリットの方が大きいと思っている。 そしてその理由も理解したつもりなので、そのメリットを生かして楽しんで行こう。
2017/2/4 作成