
HOME >> モータの調査 > GM製コアレスモータ動力ユニットのモータを測定する
モータの特性調査 GM製コアレスモータ動力ユニットのモータを測定する
GM製コアレスモーター動力ユニットを使用した動力車の特性を調査している。 ここではその解析調査に必要なモータ単体の特性を調査解析する。
.
■ モータ単体の測定方法
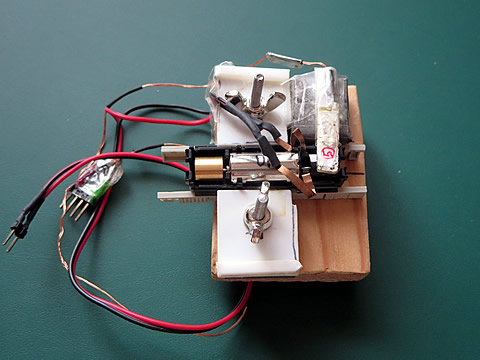
モータ単体での特性測定の方法については、再編集した「鉄道模型工学 再編集版」を参照ください。 今回使用した装置は、「負荷反力式測定装置の開発」です。 この装置を使用するのは何年かぶりになりますので、分解していたユニットの再組付けから作業を開始しました。 そして組み上がった状態を下に示す。
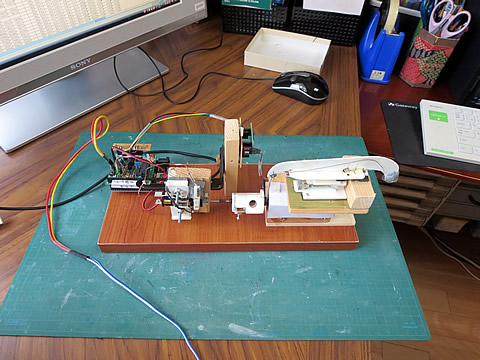

配線部品も問題なく揃っていました。 モーターの回転部も組付けることが出来ました。
この測定装置の心臓部であるロードセルを下に示す。 モータの回転負荷を与えるブレーキ装置から糸で引っ張られたレーバーがロードセルの上面を押します。 この時の歪ゲージの信号が下右の写真に示す重量計り専用A/Dコンバータ HX711 によってArduino に送られます。
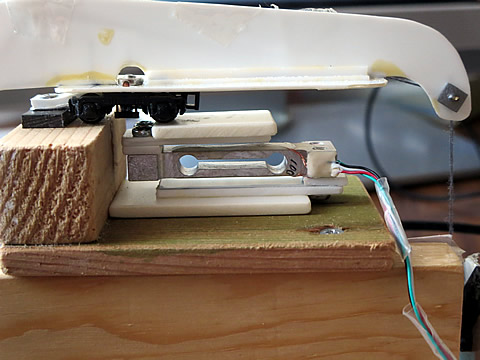
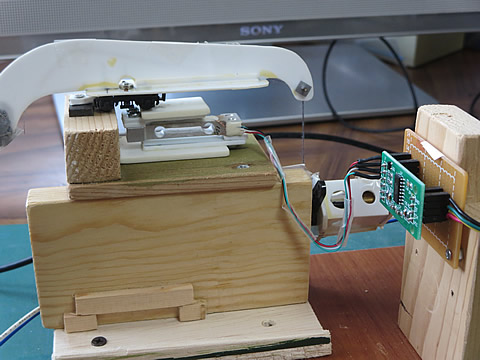
そして、Arduinoではモータに供給される電圧と電流を計測し、回転センサから送られた回転数の信号と共に、USBケーブルと使ってパソコン送信されます。
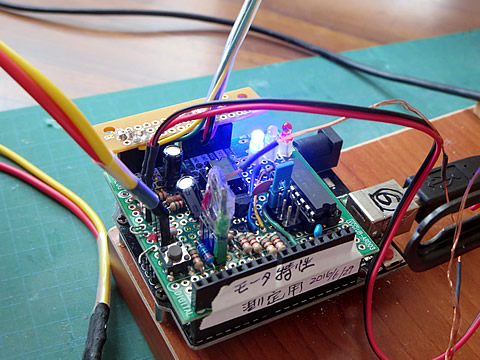
計測は、Arduinoのシールドに設けた押しボタンスイッチによって計測を開始し、規定パルスをカウント後に測定データを送信するように設定しています。
供試用のモータの取り付け方法を紹介します。 モータは製品のモータボックスにセットされた状態で使用します。 フライホイール部にはすでに白黒のマーキング程化されていますが、今回もこのマーキングを使って回転をセンシングします。 測定台への固定はモーターボックを利用して固定します。 このためモータは製品と同じ状態で保持差されていることになります。
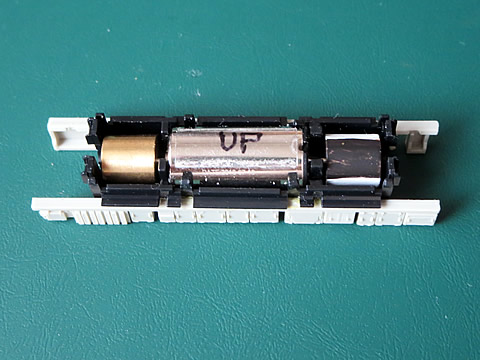
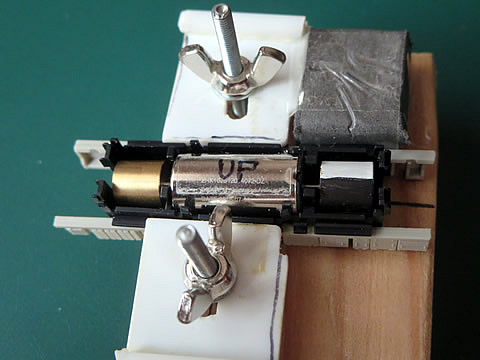
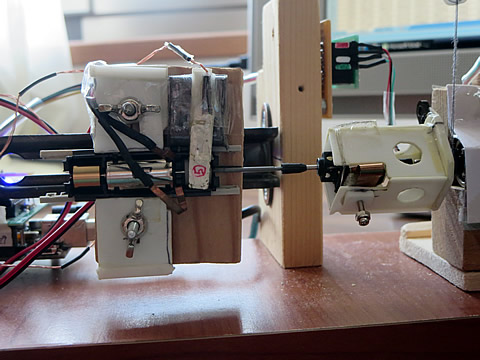
横から見た状態を下に示す。 モータ端子には製品と同じ場所に測定専用の端子を差し込み、シールドに接続します。

回転センサもマーキングされた上部に来るように置き、セロテープで固定します。 せんさの信号線もシールドに接続します。
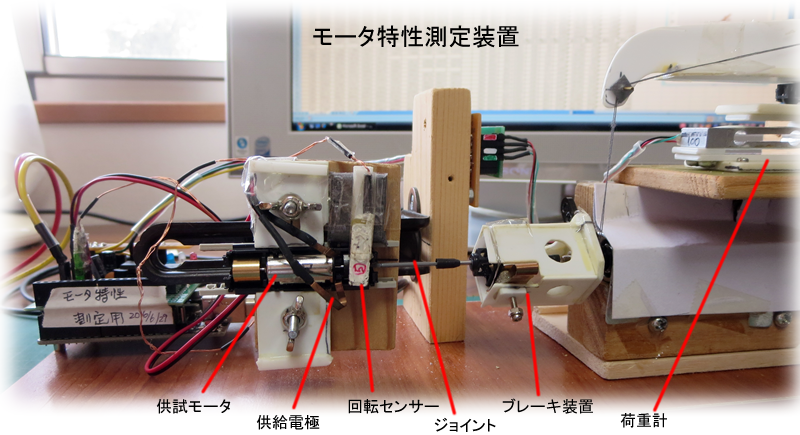
回転部分の状態を下に示す。 モータの端部とブレーキ装置の間は、KATO製の長さのながいジョイントを使用しました。 メーカーが異なっていても問題なく接続出来ました。
 .
.
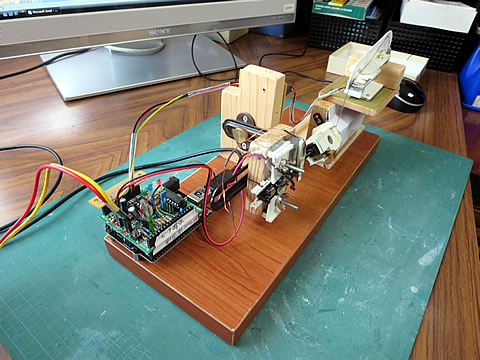
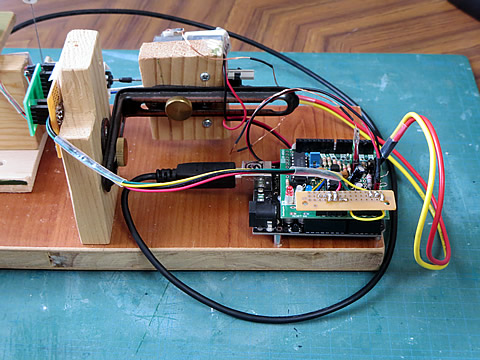
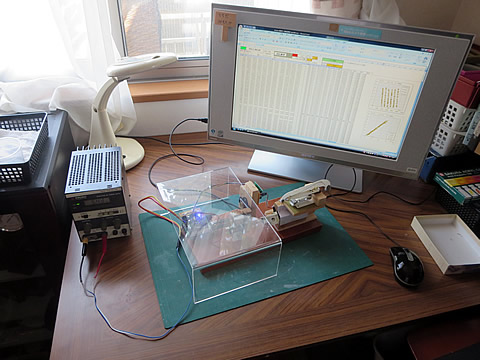
計測は、右の状態で実施しています。 まずモータへの電力を供給する電源は、いつもの安定化直流電源を使用しています。 リップルのない安定した直流を供給してくれます。
測定装置とパソコンはUSBケーブルを使用して接続させています。 そしてArduino への電力供給はこのUSBを使っています。 計測処理なので消費電力は小さいと踏んだからです。
また、小さいと言えども 1万、2万 rpm の高速でモータは回転しますので、もし、ジョイント等が外れて飛び出して来た時には危険であると考え、透明なアクリル板で覆って測定を実施しています。 無印の文房具コーナーで売っていた商品です。
測定は、ジョイントを外した無負荷状態と、ブレーキ装置と連結した負荷状態で実施しました。 電圧やブレーキ負荷などを変えながら、シールドに設けたボタンを1回毎に押して測定しています。
計測データは、Excelファイルをモータ毎に設定しています。 計測後にデータを整理してグラフを整えます。 さらに、次のステップで実施する特性解析用Excelファイルにデータをコピーできるように整えておきます。
■ 特性解析の実施
測定されたデータを元に、モータを構成する定数を推定します。 これは、モータ端子電圧、電流および回転数からモータの出力トルクを計算するために実施するもので、計測不可能な走行中の動力車のモータ出力を、計算によって求めるためです。 これによって、動力車の解析が可能となったのです。
このモータ定数を推定する方法は、「モータ特性の測定とモデル化 モータ定数の推定方法」を参照ください。
こうして求めたモータの特性を表す定数は、下記の6個です。
| 定数の推定値 | |||||
|---|---|---|---|---|---|
| Kt | Rm | λm | Ra | Ke | Eb |
次回は、それぞれのモータの測定と解析結果を報告します。