
HOME >> 動力車の調査 > KATO EF510-1 その1 その2
動力車の調査 KATO EF510-1 その1 修正版
この修正版は、当初の報告内容(第1弾、KATOのEF510-1)を再整理して修正したものです。 測定方法や解析手法などについては、モデル化の報告書を参照してください
■01 車両の概要
性能測定の前に、このモデルの概要と分解調査の結果を報告する。
 .
.
このモデルの詳細は、マイコレクションの EF510-1 を参照して下さい。 重複記載あり。
また、4年後に発売されたEF510-510 (品番:3065-2)
との比較を「EF510の新旧比較」に示す。
| メーカー | KATO | 商品名 | EF510-1 |
| 品番 | 3051-1 | 車両番号 | EF510-1 |
| 発売日 | 2006年7月 | 入手日 | 2007年12月27日 新品購入 |
模型車両の特徴: ・ヘッドライト点灯 ・フライホイール搭載動力ユニット ・サスペンション機構 ・ ローフランジ車輪 など。
◆構造を理解するために、車体を少しずつ分解していきましょう。

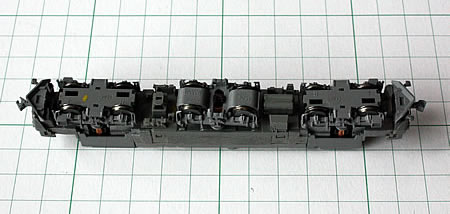
(注) 前方のフライホイールは、回転数測定のために、白色マークの細工がしてあります。


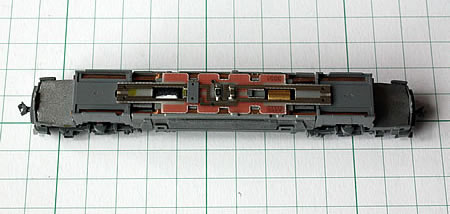
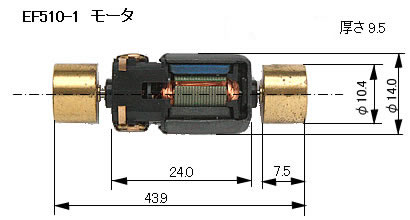
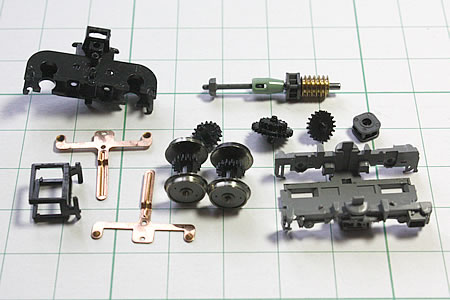
主な部品の分解状態を上の写真に示します。 ダイカスト製のフレームは一体的に作られているタイプである (左右あるいは上下に分割されていない)。 モータとジョイント、およびウォームを右の写真に示す。 フライホイール付きで、2ポール5スロットのスキュー無しマグネットモータである。 その寸法を下に示す。
また、台車部をさらに分解した状態を下に示す。 台車の刻印は3051とあり、この車両専用の台車と思われる。
 .
.
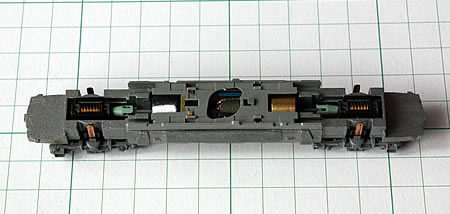
また、ウォーム軸の軸受を支持する支持体は、今までにお目に掛ったことがない特殊な構造であり、ウォームとホイールのこじれ防止対策なのだろうか。 この駆動系を構成するギヤ列を拙速なイラストにて下に示す。
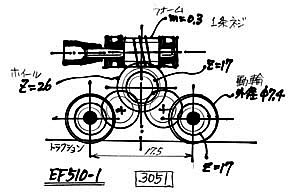
歯車は全て m = 0.3 で構成され、ウォームは1条ネジ、ホイールは Z = 26 、そして同軸で Z = 17 の2段歯車を形成し、アイドラギヤを介して動輪の Z = 17 の歯車に伝達している。従って、減速ギヤ比が i = 26 のギヤ列を構成していることになる。 動輪径は、φ7.4mm で、内側の片方の動輪にトラクション・ゴムを履いている。 その他の諸元として、車体重量は 95.5 グラム、前後の台車の動輪に掛る荷重はそれぞれ 40.0 グラムであった。
■02 ライト基板の特性調査
まず、電気回路上、モータと並列に挿入されているライト基板の特性を調査しておこう。
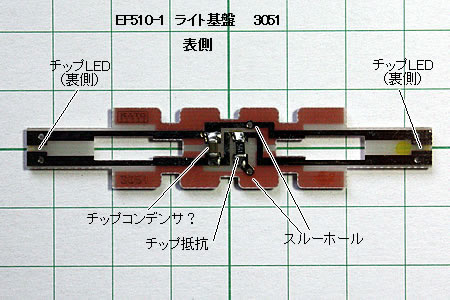
この基板は、裏表に回路が形成され、スルーホールを通して導通されている。 両端には前後のライト用のチップLED が半田付けされており、 このLED と直列にチップ抵抗も半田付けされている。 テスターで測定すると、およそ560 Ωであった。
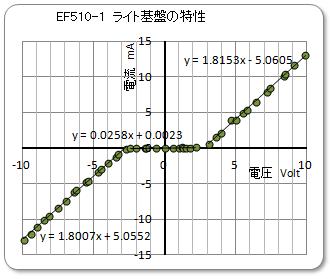
このスルーホール近くの導線部をクリップで挟み、電圧を掛けながら電流を測定したのが右上のグラフである。 3 Volt 近くになるとLED が光り出すと共に、電流は一直線状に上昇する。 極性を反転しても同様な傾向を示し、対称な特性であることが判る。 電流の上昇勾配は 1.81mA/Volt である事から、約552Ωとなり、チップ抵抗の実測値と合致する。 電流の立ち上がりはおよそ 2.8Volt で、それまではわずかに電流が上昇しているが無視出来るであろう。
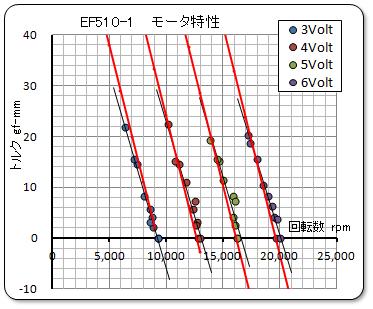
■03 モータ単品の速度特性とトルク特性の調査
単品状態でのモータを測定する。 取付方法の改善に従って再測定データを整理してグラフ化したものを下に示す。
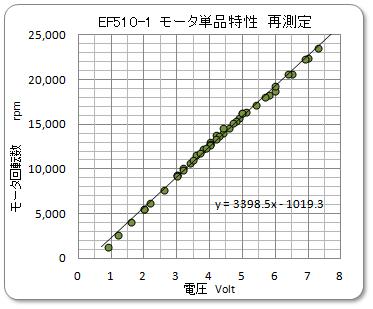
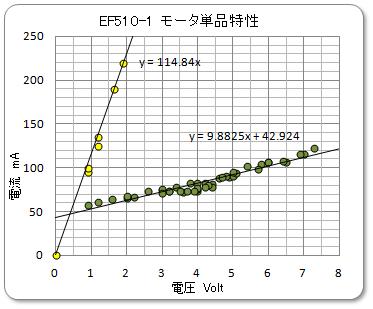
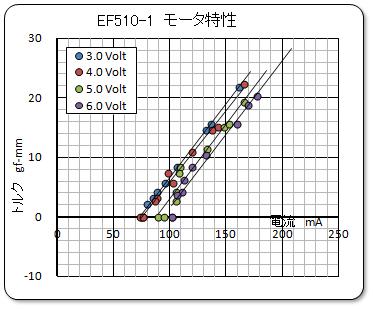
このデータからモータの特性を定める各定数を求める
■04 モータモデルの定数の推定
モータモデルの各種定数の推定を実施する。 当初は手探るで実施した計算であったが、 その後整理した推定方法に従って再計算を実施し、推定値を少し修正している。
1) 電圧系定数の推定
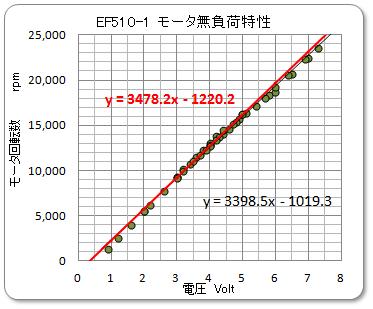
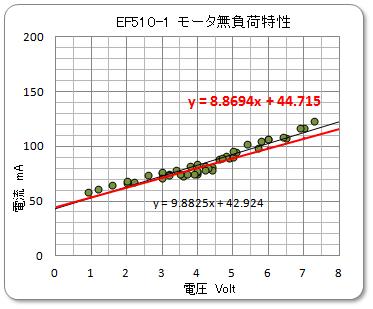
まず、外部電圧、電流、回転数のデータより、Ke 、Ra 、Eb の定数を推定する。 負荷と無負荷状態の外部電圧、電流、回転数の全データより、下のグラフを作成する。
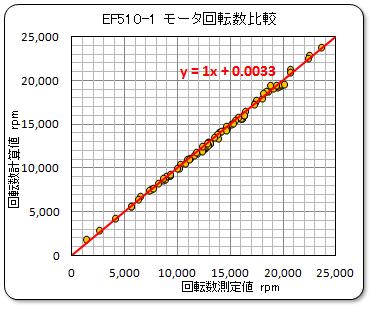
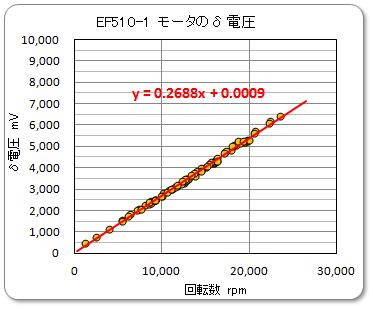
このグラフを参考にして推定した定数の数値は、 Ra = 7.335、Ke = 0.0002688、Eb = 0.0 とした。
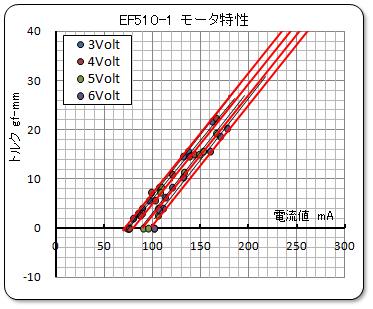
2) トルク系定数の推定
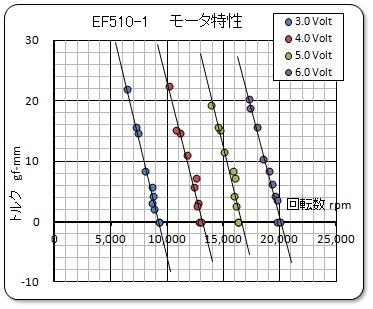
同様に、回転数 Nm 、電流 I 、出力トルクTm’のデータより、Kt 、Rm 、λm の定数を推定する。 負荷と無負荷状態の外部電圧、電流、回転数の全データより、下の二つのグラフを作成する。
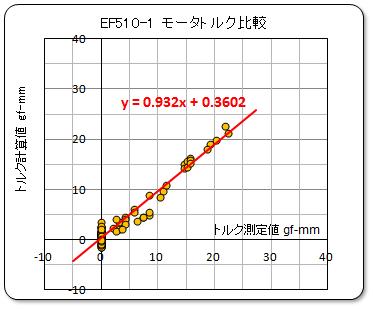
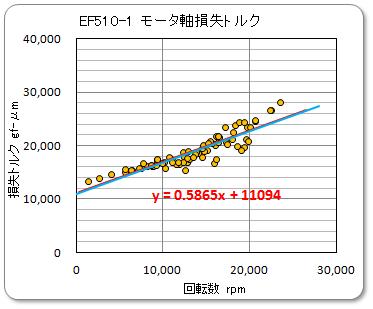
このグラフを参考にし、他の項目を見ながら最適値を探し、 Kt = 230、Rm = 11、λm = 0.0005865 と推定した。 この時の値を右のグラフ上の青い線で示す。 赤い線で示したプロット点からの近似直線をそのまま採用している。
3) 無負荷特性とモータ特性のマッチング具合
実測データのグラフの上に、推定した定数を用いて計算したデータを赤線で示し、推定した定数のマッチング具合を検証する。
このモータ特性は、実測値と計算値は良く合致しており、モータのモデルとしては充分に活用出来ると言える。