
丂丂HOME >> 摦椡幵偺挷嵏丂>丂KATO EF510-1丂丂丂丂偦偺侾丂丂偦偺俀丂丂偦偺俁
摦椡幵偺挷嵏丂丂KATO EF510-1丂丂偦偺俀
仭03丂儌乕僞扨昳偺懍搙摿惈偲僩儖僋摿惈偺挷嵏
丂扨昳忬懺偱偺儌乕僞傪應掕偡傞丅丂應掕曽朄偼丄乽儌乕僞偺僩儖僋摿惈傪應掕 偦偺俀乿偵偰曬崘偟偨曽朄偱幚巤偟偨丅丂應掕忬懺傪壓婰偵帵偡丅
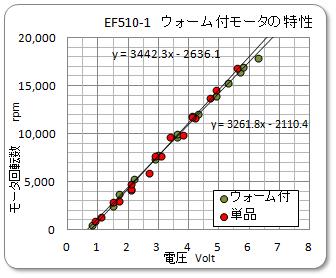
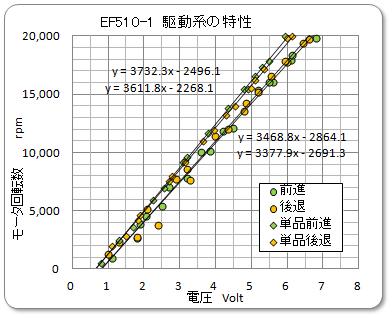
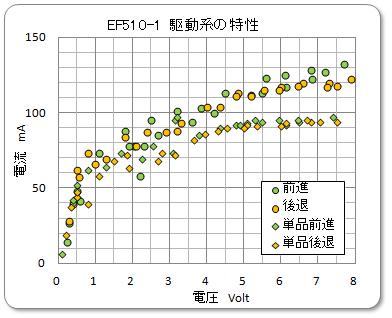
丂嵟弶偵丄懍搙摿惈偲偟偰丄儌乕僞偵晧壸傪妡偗側偄僼儕乕偺忬懺偱丄揹埑偲揹棳丄偍傛傃夞揮悢傪應掕偟偨丅
丂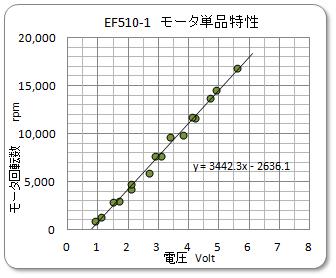
丂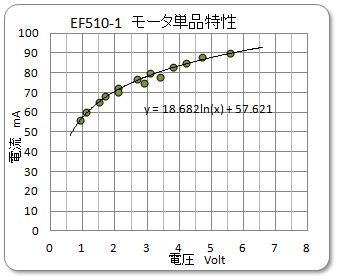 丂
丂
丂晧壸偺妡偭偰偄側偄忬懺側偺偱丄儌乕僞偺僩儖僋偼僛儘偺偼偢偱偁傞偑丄偦傟偼奜晹僩儖僋偑僛儘偱偁傞偙偲偵傎偐側傜側偄丅丂儌乕僞傪夞揮偝偣傞偨傔偵偼丄怓乆側撪晹掞峈偵傛偭偰偄偔傜偐偺僩儖僋傪昁梫偲偟偰偄傞丅丂偦偺撪晹掞峈偲偟偰偼丄揹婥揑側掞峈偲嫟偵丄幉庴傗僽儔僔丄偁傞偄偼嬻婥掞峈側偳偺婡夿揑側夞揮掞峈傕儌乕僞撪晹偵偼敪惗偟偰偄傞丅丂偙偺偨傔丄揹棳抣偑曄壔偟偰偄傞偲峫偊偰偄傞丅丂偦偺撪梕傪夝愅偡傞偵偼丄偝傜偵怓乆側夝愅摴嬶偑昁梫側偺偱庤偑弌偣側偄椞堟偱偁傞丅
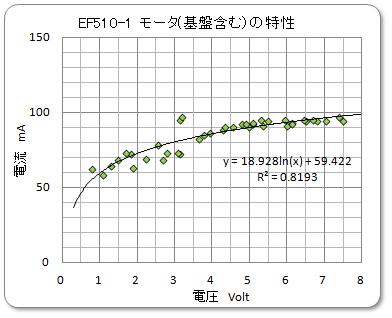
丂偦偙偱丄偙偺忬懺傪尦偵偟偰丄嬤帡幃傪媮傔丄儌乕僞偺扨昳摿惈偺傂偲偮偲偟偨丅丂應掕偼埨掕偟偨忬懺偱寁應偝傟偰偄偨偑丄撪晹壏搙側偳偼枹娗棟偺忬懺側偺偱丄僶儔偮偄偨抣偼彮偟攋婞偟偰嬤帡幃傪媮傔偨偺偑塃偺僌儔僼偱偁傞丅丂傑偨丄夞揮偟偰偄側偄忬懺偱偺抣傕彍奜偟偰偄傞丅丂昞寁嶼僜僼僩EXCEL 傪巊梡偟丄偄傠偄傠側幃傪揔梡偟偨偑丄懳悢嬤帡偑傕偭偲傕傜偟偐偭偨偺偱嵦梡偟偨傕偺偱偁傞丅丂儌乕僞偺柍晧壸忬懺偱偺揹棳偲揹埑偺娭學幃偼丄
丂丂丂丂丂y = 18.682ln(x) + 57.621丂 丒丒丒丒丒丒丒丒丒丒丒丒丂乮侾乯幃
偲偡傞偙偲偵偟偨丅丂偙偺幃偼丄嬱摦宯偺懝幐僩儖僋傪寁嶼偡傞偨傔偵巊梡偡傞偙偲偵偟偰偄傞丅
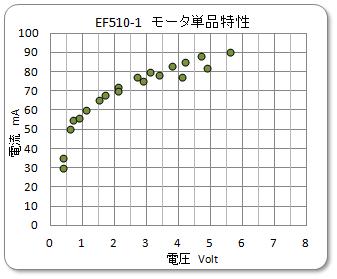
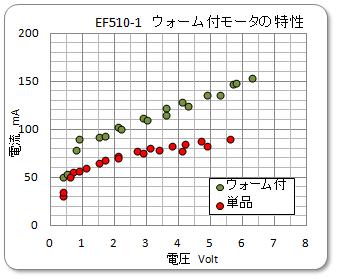
丂師偵丄晧壸傪妡偗偨忬懺偱丄僩儖僋摿惈傪應掕偟偨丅丂儌乕僞偺抂巕揹埑傪僷儔儊乕僞偵偟偰丄3丄4丄5丄6Volt 偺忬懺傪曐偭偰應掕偡傞丅 丂嬤帡幃偼捈慄嬤帡偲偟偰偄傞丅
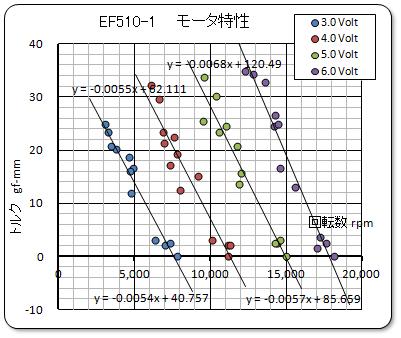
僨乕僞偼彮偟僶儔僣僀偰偄傞偑丄傑偁偙傫側傕偺偩傠偆偲敾抐偟偰偄傞丅
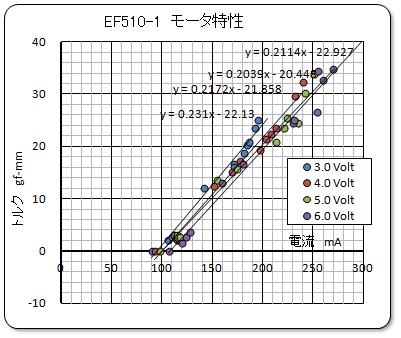
丂僩儖僋偲揹棳偺僌儔僼偱偼丄揹埑偵傛偭偰傕曄壔偟偰偄傞偑丄偙傟偼夞揮悢偵傛傞掞峈偺堘偄偲憐掕偟偰偄傞丅丂偟偐偟丄僌儔僼偺岡攝丄懄偪僩儖僋偲揹棳偺曄壔暘傪峫偊傟偽丄偙傟傜偺塭嬁傪柍帇偟偰丄偦偺岡攝偼摨偠偲峫偊傞帠偵偡傞丅丂偦偟偰丄揹棳抣偺嵎偐傜儌乕僞偺僩儖僋傪嶼弌偡傞學悢偲偡傞偙偲偵偟偨丅丂懄偪丄岡攝偺暯嬒抣偱偁傞 0.2159 傪巊梡偟偰丄儌乕僞偺悇掕僩儖僋Tm' 傪
丂丂丂丂Tm' = 0.2159 * I 丂丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丂乮俀乯幃
偲偡傞偙偲偵偟偨丅丂偙偙偱丄Tm' 偼 gf-mm 丄I 偼揹棳抣偱 mA 偱偁傞丅丂偙傟偵傛偭偰丄揹棳抣偐傜儌乕僞偺僩儖僋傪悇掕偡傞偺偱偁傞丅
**********************************
丂師偵丄戝抇側峫偊偲偟偰丄杸嶤掞峈側偳偑僛儘偺応崌偵偼丄偳傟偩偗偺尅堷椡傪敪婗偡傞偩傠偆偐傪帋嶼偟偰傒傞帠偵偟偨丅丂懄偪丄嬱摦晹偺揱払岠棪偑 1.0 乮兣= 1.0 乯偲偡傞偲丄儌乕僞偺夞揮悢傪 Nm [ rpm ] 丄幵懱偺僗働乕儖懍搙傪 V [ Km/h ] 丄儌乕僞偺僩儖僋傪 Tm [ gf-mm ]丄摦椡幵偺尅堷椡傪 Fk [ gf ]丄摦椫偺捈宎傪 D [ mm ] 丄 尭懍婡峔偺僊儎斾傪 i 偲偡傞偲丄 N 僎乕僕偺弅広偼 1/150 側偺偱丄
丂丂丂丂丂V 亖 兾D/i 丒Nm 丒 60亊150乛1,000,000 亖丂0.0283 丒D/i 丒Nm丂丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丂乮俁乯幃
丂丂 丂丂Fk 亖 2/D 丒i 丒Tm 丂丂丂丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丒丂乮係乯幃
偲側傞丅
丂忋婰偺應掕僨乕僞傪梡偄偰幵椉摿惈偵姺嶼偟偨僌儔僼偑壓婰偺僌儔僼偱偁傞丅
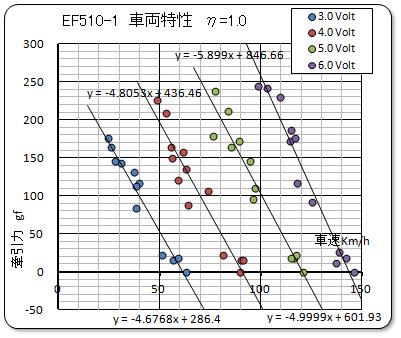
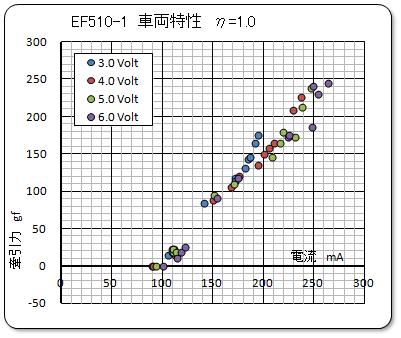
丂側傫偲丄 儌乕僞偼 100 僌儔儉埲忋偺尅堷椡傪敪婗偡傞擻椡傪帩偭偰偄傞偙偲偵側傞丅
仭04丂嬱摦宯偺懝幐摿惈偺挷嵏丂僂僅乕儉晹
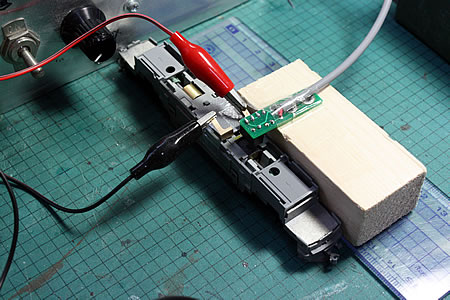
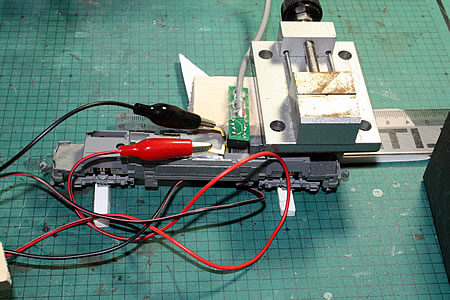
丂偄傛偄傛嬱摦晹偺懝幐僩儖僋傪挷嵏偡傞偙偲偵偡傞丅丂傑偢巒傔偵僂僅乕儉晹傪應掕偟偨丅丂僂僅乕儉幉傪幉庴偗巟帩懱偵僙僢僩偡傞丅丂偙偺巟帩懱偼戜幵偵偼傔崬傑傟傞偺偱丄戜幵撪偺儂僀乕儖傪庢傝嫀傝丄僂僅乕儉幉偩偗偑夞揮偡傞傛偆偵偟偨丅丂壓偺嵍偺幨恀偑僂僅乕儉幉傪僙僢僩偟偨忬懺偱丄塃偺幨恀偼丄儌乕僞偲僕儑僀儞僩傪慻傒崬傫偱夞揮弌棃傞傛偆偵偟偨傕偺偱偁傞丅丂僂僅乕儉幉偼椉懁嫟慻傒崬傫偱偄傞丅丂傑偨丄儌乕僞傊偺揹椡偺嫙媼偼丄椨惵摵惢偺敄斅傪嵶岺偟偨椪帪偺抂巕傪棙梡偟偰偄傞丅
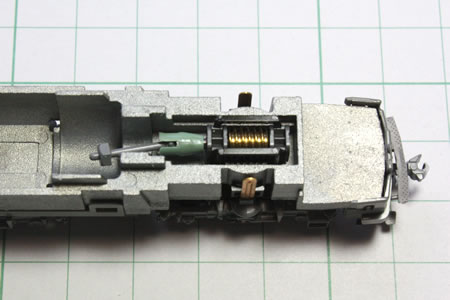
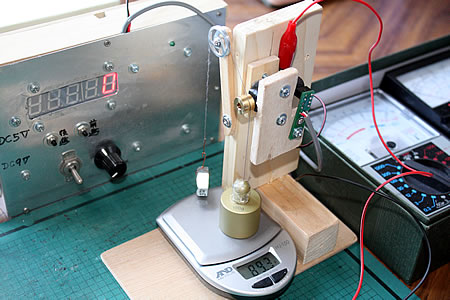
應掕忬懺傪壓偵帵偡丅丂儌乕僞抂巕偺揹埑偲揹棳傪應掕偡傞偲嫟偵丄僼儔僀儂僀乕儖偺敀怓儅乕僋傪棙梡偟偰夞揮悢傪應掕偟偰偄傞丅丂夞揮僙儞僒傪栘曅偵揬傝晅偗丄應掕拞偼丄嵍偺幨恀偺條偵儈僯僶僀僗傪廳傝偲偟偰巊梡偟屌掕偟偰偄傞丅
丂偙偺忬懺偼丄儌乕僞偺僼儕乕忬懺偐傜僂僅乕儉偑僾儔僗偝傟偨忬懺側偺偱丄偦偺揹棳抣偺嵎偐傜僂僅乕儉幉偺夞揮杸嶤懝幐傪嶼弌弌棃傞偼偢偱偁傞丅丂偦偺應掕寢壥傪壓偺僌儔僼偵帵偡丅
丂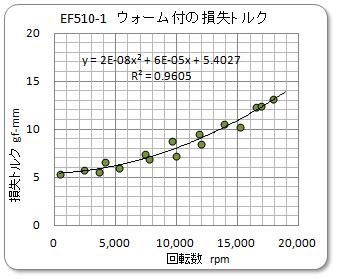 丂.
丂.
丂夞揮悢偼曄壔偟偰偄側偄偑丄梊憐捠傝偵揹棳抣偑傾僢僾偟偰偄傞丅丂偦偙偱丄應掕偝傟偨揹棳抣偲丄僼儕乕忬懺偱偺揹棳丒揹埑偺娭學幃丄懄偪乮侾乯幃偐傜寁嶼偟偨揹棳抣偲偺嵎傪媮傔丄偦偺嵎傛傝丄乮俀乯幃偐傜懝幐僩儖僋傪悇掕偡傞偙偲偵偟偨丅
丂乮椺乯丂E = 3.6 Volt丄I = 122 mA丄N = 9,631rpm 偺應掕揰
丂丂
丒
摨偠揹埑帪偺儌乕僞扨懱偺揹棳抣傪嶼掕丗 丂乮侾乯幃傛傝 I' = 81.55 mA
丂丂
丒偙偺帪偺儌乕僞僩儖僋傪嶼弌丗丂丂I 偲 I' 偺揹棳嵎傪傕偲偵乮俀乯幃傛傝丂懝幐僩儖僋 = 8.7 gf-mm 偲寁嶼丂丂
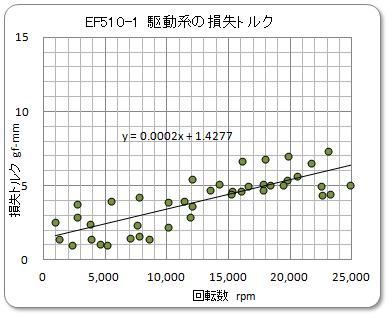
丂偙偆偟偰媮傔偨懝幐僩儖僋傪僌儔僼壔偡傞偵偁偨傝丄墶幉偵偳偺摿惈傪帩偭偰偔傞偺偐専摙偟偰傒偨丅丂揹埑偱偼尰徾偲偟偰儅僢僠偟側偄偺偱丄夞揮悢傪墶幉偵庢偭偰懝幐僩儖僋傪僌儔僼壔偟偨偺偑丄嵍偺僌儔僼偱偁傞丅丂夞揮悢丄懄偪懍搙偵傛偭偰掞峈偑憹偊傞偺偼丄棟偵偐側偭偨尰徾偱偁傞偲峫偊傞帠偑弌棃傞丅丂偦偟偰丄懍搙偺崁偼懍搙偺俀忔偵斾椺偡傞崁傕塭嬁偟偰偄傞偑丄偙傟偼堦斒揑偵尵傢傟偰偄傞帠徾偲傕崌抳偟偰偄傞偺偱丄揝摴柾宆岺妛奣榑傪尒捈偡昁梫偑偁傞偐傕抦傟側偄丅丂偟偐偟丄幃偑暋嶨偵側傝夁偓傞偺偱丄偝傜偵僨乕僞偑拁愊偝傟偨屻偱丄専摙偡傞偙偲偵偟傛偆丅丂偦傟偵偟偰傕丄扨偵僂僅乕儉幉傪慻晅偗偨偩偗側偺偵丄偐側傝偺僩儖僋丄偁傞偄偼揹棳傪怘偭偰偄傞偺偩側偀丒丒丒丒丒丒偲巚偄偮偮師偺幚尡傪峴偭偨丅
仭05丂嬱摦宯偺懝幐摿惈偺挷嵏丂戜幵偺僊儎晹丂
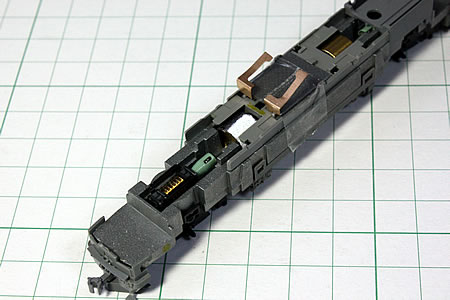
丂師偵丄僂僅乕儉儂僀乕儖偲傾僀僪儔僊儎丄偍傛傃摦椫傪戜幵偵慻傒崬傒丄儌乕僞偐傜嬱摦偝偣傞忬懺偵偟偨丅丂崱夞偼丄摦椫偑夞揮偡傞偺偱戜幵偺壓偵 5mm 僾儔斅傪偐傑偣偰丄摦椫傪僼儕乕忬懺偵偟偰偄傞丅丂慜屻偺戜幵偺嬱摦晹暘傪夞揮偝偣傞偺偱丄偙偺晹暘偺懝幐僩儖僋傪嶼弌偡傞慱偄偱偁傞丅
丂應掕僨乕僞偺僌儔僼傪壓偵帵偡丅丂儌乕僞扨懱丄僂僅乕儉晅偒偺忬懺丄偦偟偰僊儎晅偒偺忬懺偲晧壸偵側傞晹暘偑憹偊偰偄偔偺偱丄揹棳抣偼偦傟憡墳偵傾僢僾偡傞傕偺偲巚偭偰應掕傪懕偗偰偄偨偑丒丒丒丒丒丒丒丒丒丒丒丒丒丄丂側傫偲偦偺婜懸偼尒帠偵奜傟偰偟傑偭偨丅
丂嵍偺僌儔僼偵帵偡夞揮悢偺曄壔偼杦傫偳柍偄偲尵偭偰傕椙偄偑丄塃偺僌儔僼偺揹棳抣偺抣傪尒偰丄僴僞偲庤偑巭傑偭偰偟傑偭偨偺偱偁傞丅丂僊儎晅偒偺応崌丄僂僅乕儉偩偗偺応崌傛傝傕揹棳抣偑壓偑偭偰偟傑偭偨偺偱偁傞丅丂杸嶤掞峈偑憹偊偨偼偢側偺偵丄晧壸偑尭偭偰偟傑偭偰偄傞偺偩丅 丂壏搙偺塭嬁偐偲巚偭偰丄幚尡憰抲傪偦偺傑傑偵偟丄俀帪娫屻偵嵞搙應掕偡傞偲丄偙傟傑偨偝傜偵壓偑偭偰偟傑偭偨丅
丂堦夞偺應掕帪娫偼偍傛偦10乣20暘掱搙偱偁傞丅丂偦偟偰丄慻捈偟偨偺偼戜幵偵僊儎傪慻傒崬傫偩侾夞偩偗偱偁傞丅丂摉偨傝偑晅偄偰偒偨偲傕巚偊側偄偺偱丄慻晅偗偵敪惗偟偨僐僕儗偑塣揮拞偵帯偭偰偺偱偼側偄偐偲傕巚偭偰傒偨丅丂應掕僨乕僞偺僶儔僣僉偲偼巚偊側偄偟丄應掕曽朄偑娫堘偭偰偄傞偺偐丠丂偲偐丄側傫偱丠丂偲偐峫偊傞傕偺偺丄傛偔傢偐傜偵偺偱幚尡偼棫偪巭傑偭偰偟傑偭偨偺偱偁傞丅丂
仭06丂嬱摦宯偺懝幐摿惈偺挷嵏丂嵞幚巤
丂摢傪椻傗偡偨傔偵堦擔抲偄偰應掕傪嵞奐偟偨丅丂崱搙偼丄儔僀僩婎斅傪慻晅偗偨忬懺偱應傞偙偲偵偟偨丅丂棟桼偼儔僀僩偺揰摂偵傛傝丄儌乕僞偺夞揮曽岦傪僠僃僢僋偡傞偨傔偱偁傞丅丂偦偺忬懺偑塃偺幨恀偱偁傞丅丂
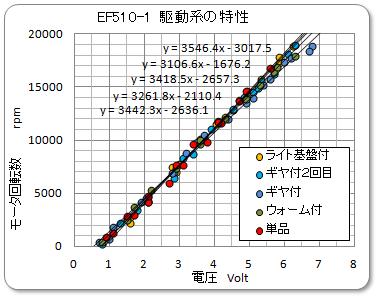
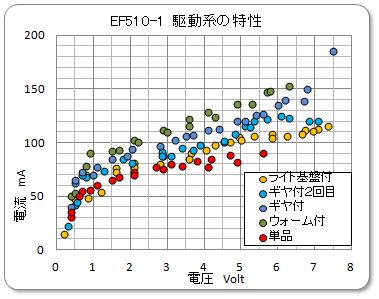
丂偦偟偰丄儌乕僞扨昳忬懺偱丄偐偮婎斅傪慻傒崬傫偩忬懺偵偟丄揹婥偺嬌惈傪曄偊偰應掕偡傞偲嫟偵丄僂僅乕儉傗僊儎椶傪慻傒崬傫偩忬懺偲斾妑偟偨丅丂偦偺寢壥偺僌儔僼傪壓偵帵偡丅丂僊儎椶傪慻崬傫偩忬懺偱偼丄夞揮悢偑掅壓偟丄揹棳抣偼忋徃偟偰偄傞丅丂偦偟偰慜恑偲屻戅偱偼偦偺嵎偼柍偄傛偆偱偁傞丅丂傑偨丄崱傑偱偵應掕偟偰偒偨幵椉偺摦椡摿惈抣偲傕崌抳偟偰偍傝丄慡偔棟偵偐側偭偨僨乕僞偲側偭偰偄傞丅丂
丂側偍丄慜恑偲屻戅偺敾暿偼丄侾僄儞僪懁偺儔僀僩偑揰摂偡傞応崌傪慜恑偲偟丄偦偺媡傪屻戅偲偟偰偄傞丅丂偄傑傑偱丄怴偟偄幵椉傪嵟弶偵暘夝偡傞帪丄慻晅偗曽岦傪妎偊偰偍偔偨傔丄侾僄儞僪懁偵偼丄晹昳枅偵墿怓偺儅乕僉儞僌傪敄偔晅偗傞傛偆偵偟偰偄偨帠偑丄偙偙偱偼栶偵偨偭偰偄傞偺偱偁傞丅
丂偙偺丄扨昳忬懺偲偺嵎偼丄僊儎椶偑慻崬傑傟偰偄傞偐偳偆偐偺堘偄偱偁傞偨傔丄偦偺僩儖僋嵎傪媮傔傟偽丄嬱摦宯偺懝幐僩儖僋偲尵偆帠偑尵偊傞丅丂偦偙偱丄忋婰偲摨偠條偵丄扨昳忬懺偱偺揹埑偲揹棳偐傜嬤帡幃傪媮傔乮壓偺嵍偺僌儔僼乯丄偦偺幃傪巊偭偰揹棳抣偺嵎傪寁嶼偟丄偝傜偵僩儖僋偵姺嶼偟偨傕偺偑塃偺僌儔僼偱偁傞丅
丂 丂.丂
丂.丂
丂偙偺懝幐僩儖僋偺僌儔僼傪尒偰偄傞偲丄庤偺崬傫偩傗傝曽偱媮傔偨僨乕僞偱偁傞偑丄偦傟傜偟偒抣偱偼側偄偐偲嵘傫偱偄傞丅
丂偦偺棤晅偗偲偟偰丄嵍偺幨恀偺傛偆偵丄僩儗乕儔幵偺僐儘僈儕掞峈傪應掕偡傞曽朄偱儗乕儖懁偐傜杸嶤掞峈傪應掕偟偰傒偨丅丂偦偺寢壥丄僂僅乕儉柍偟偺忬懺偱1.6 僌儔儉偺憱峴掞峈偱偁傝丄摦椫宎丄僊儎斾傛傝儌乕僞幉夞傝偺僩儖僋偵姺嶼偡傞偲丄0.23 gf-mm 偺僩儖僋偲側傞丅丂偙傟偼杦傫偳 柍帇弌棃傞掱偺彫偝側抣偲側偭偰偟傑偆偺偱偁傞丅 丂偙傟傜偺抣偼丄嬱摦宯傪揱傢傞椡偑帺暘偺杸嶤掞峈暘偟偐側偄乬柍晧壸忬懺乭偱偁傝丄懝幐僩儖僋偺婎慴偲側傞抣偱偁傞偑丄偦偺傎偲傫偳偼丄僂僅乕儉幉夞傝偺杸嶤僩儖僋偱偼側偄偩傠偆偐偲峫偊偰偄傞丅
丂嬱摦宯偵椡偑妡偭偨応崌偺懝幐僩儖僋偼丄幚嵺偵晧壸傪妡偗偰應掕偟側偗傜偽側傜側偄偺偱丄摿庩側側應掕憰抲偑昁梫偲側偭偰偔傞丅丂偁傞偄偼丄幵椉偲偟偰幚嵺偵憱傜偣偨忬懺偱尅堷椡傪應掕偡傞偙偲偵側傞丅
丂偱偼丄嵟弶偵應掕偟偨扨偵僂僅乕儉幉傪慻晅偗忬懺偱偺晧壸僩儖僋偼壗偩偭偨偺偩傠偆偐丠丂椉幰偺僌儔僼傪斾妑偟偰傕媈栤偑桸偔偽偐傝偱偁傞丅丂懍搙偺俀忔崁偺孹岦傕尒摉偨傜偵偟丄傑偝偵乽屜偵偮傑傑傟傞乿忬懺偱偁傞丅丂偙傫側応崌偵偼嵞幚尡偡傞偺偑杮棃偱偼偁傞偑丄偍偦傜偔嵞尰偟側偄偩傠偆偲巚偆偺偲丄柺搢偩偭偨偺偱崱夞偼僷僗偟偰偟傑偭偨丅丂
仭07丂揹婥夞楬偺揹埑崀壓
丂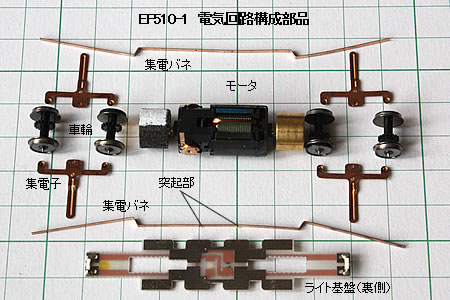 丂.
丂.
丂師偵丄揹婥夞楬偺揹埑崀壓偵偮偄偰挷嵏偡傞丅丂儌乕僞扨懱偱偺應掕偼弌棃傞偩偗儌乕僞抂巕丄偁傞偄偼偦傟偵嬤偄応強偵揹婥傪嫙媼偟丄偦偺揹埑傪應掕偟偰偄傞丅丂偱傕丄揝摴柾宆偺応崌偵偼丄儗乕儖偐傜揹婥偼嫙媼偝傟傞偺偱丄儌乕僞抂巕傑偱偺娫偺揹埑崀壓傪峫椂偟偰偍偐側偗傜偽側傜側偄丅
丂嬌抂側応崌丄儗乕儖傗幵椫偺墭傟偵傛偭偰丄摦偐側偄偲尵偆帠偼丄柾宆僼傽儞側傜忢幆偲傕側偭偰偄傞擔忢拑斞帠側偺偱偁傞丅丂偙傟偼丄墭傟偵傛偭偰愙怗掞峈偑憹偟丄揹埑崀壓偑戝偒偔側偭偨偨傔丄嫙媼偝傟偨揹婥偑儌乕僞偵揱傢傜柍偄帠傪堄枴偟偰偄傞丅丂偙傟傎偳偵戝偒偔塭嬁偡傞揹埑崀壓傪僠僃僢僋偟偰偍偔昁梫偑偁傞丅
丂傑偢丄揹婥夞楬傪峔惉偡傞晹昳傪暲傋偰尒偨偺偑丄嵍偺幨恀偱偁傞丅丂儗乕儖偲幵椫偼揮偑傝側偑傜愙怗偟丄偦偺幵椫偼廤揹巕偲僺儃僢僩幉庴晹偱愙怗偟偰偄傞丅丂偦偟偰廤揹巕偼廤揹僶僱偵愙怗偟丄偦偺撍婲晹傪捠偟偰儔僀僩婎斅偺棤懁偺夞楬偵愙怗偟偰偄傞丅丂偦偟偰偦偺夞楬傪捠偭偰愙怗偡傞儌乕僞偺抂巕偵揹婥偼揱傢傞偙偲偵側傞丅
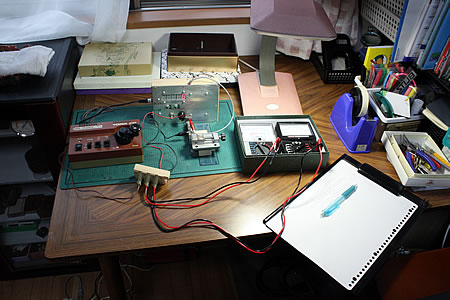
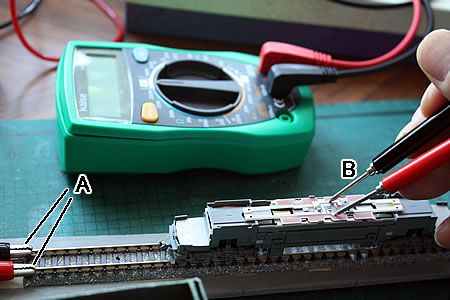
丂偙傟傜偺晹昳傪僋儕乕僫偱鉟楉偵憒彍偟偨屻丄嵞慻晅偗偟偰夞楬偺掞峈傪應掕偡傞偙偲偵偟偨丅丂偦偺條巕傪壓偺幨恀偵帵偡丅丂儗乕儖偺抂晹 A 偵儐僯僢僩偐傜揹婥傪嫙媼偡傞丅丂偦偟偰丄僥僗僞乕偺僾儖乕僽傪儔僀僩婎斅偺僗儖乕儂乕儖晹 B 偲丂儗乕儖抂晹 A 偲偱揹埑傪寁傝丄偦偺嵎傪僌儔僼壔偟偨偺偑丄塃偺僌儔僼偱偁傞丅丂應掕慜偵儗乕儖偺僋儕乕僯儞僌偼栜榑幚巤偟丄應掕拞傕丄B 晹偱墴偝偊側偑傜幵椉傪慜屻偝偣側偑傜應掕偡傞側偳偺攝椂傪峴偭偰偄傞丅
丂嵟弶偼幨恀偵幨偭偰偄傞僨僕僞儖儊乕僞偱丄AB 娫偺掞峈傪捈愙寁應偟偨偑丄昞帵僨乕僞偼埨掕偣偢丄偦偺抣傕戝偒偔曄壔偟偰偄偨偺偱丄寁應晄埨掕偲偟偰偁偒傜傔偨丅
偙偺條側応崌偼丄傾僫儘僌儊乕僞偵尷傞偺偱丄傾僫儘僌僥僗僞乕偱應掕偟偨丅丂偦傟偱傕恓偺怳傟偼敪惗偟偰偄傞偑丄偦偺摦偒偼撉傒庢傞帠偑弌棃傞丅丂偍傛偦丄侾偐傜俀兌偺娫傪峴偭偨傝棃偨傝偟偰偄偨丅丂幵椉傪憗偔偆偛偐偟偨傝巭傔偰尒偨傝偡傞傕偺偺丄恓偺摦偒傆傜傆傜偟偰偄偨丅丂偦偙偱丄揹棳傪棳偟偰A 偲 B 偺娫偺揹埑崀壓検傪應掕偟偨偺偱偁傞丅
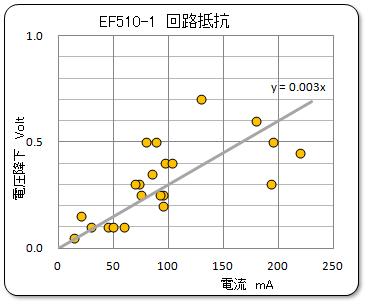
丂傾僫儘僌儊乕僞偱偺傆傜偮偔恓傪撉傫偱偄傞偨傔丄0.1Volt 埲壓偺抣偼怣棅弌棃側偄偑丄僌儔僼偵帵偡傛偆偵丄僶儔偮偒偼戝偒偄丅丂嬤帡捈慄傪媮傔偰尒傞偲丄岡攝偼挌搙0.003 偲側傝丄偙傟偼俁.0兌 偺掞峈抣偱偁傞帠傪帵偟偰偄傞丅丂墲暅偱俁兌丄曅摴偱1.5兌偲偡傞偲丄愭傎偳偺掞峈應掕抣偲柕弬偼柍偄丅
丂偦傟偵偟偰傕傆傜偮偒偺戝偒偄偙偲偵丄偁傜偨傔偰嬃偄偰偄傞丅丂幒撪摂側偳偑僠儔僠儔偡傞偺傕丄偙偺偨傔偩傠偆偐丅丂儌乕僞偵庢傝晅偗傜傟偨僼儔僀儂僀乕儖傕偙偺傆傜偮偒懳嶔偺傛偆側婥偑偟偰偒偨丅