
HOME >> 動力車の調査 > KATO EF65-511 その1 その2
動力車の調査 KATO EF65-511 その1
動力車調査の第2弾として、KATOのEF65-511を選び分解調査することにした。 このモデルは1989年に発売されたEF81型から始まったフライホイール搭載の新しい動力ユニットの初期段階に発売されており、このタイプの動力ユニットの初期型として、その動力特性を調査することにした。
■01 車両の概要
性能測定の前に、このモデルの概要と分解調査の結果を報告する。
 .
.

このモデルの詳細は、マイコレクションの EF65-511 を参照して下さい。 重複記載あり。 また、KATO EF65の新旧比較 も参考にして頂けると面白いと思います。
| メーカー | KATO | 商品名 | EF65 JR貨物色 |
| 品番 | 3017-3 | 車両番号 | EF65-511 |
| 発売日 | 1992年 |
入手日 | 2011年11月 中古品入手 |
模型車両の特徴: ・ヘッドライト点灯 ・フライホイール搭載動力ユニット など。
◆ 構造を理解するために、車体を少しずつ分解していきましょう。

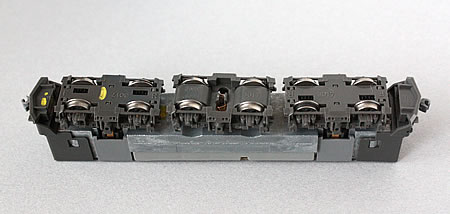

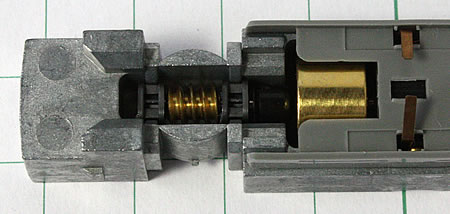
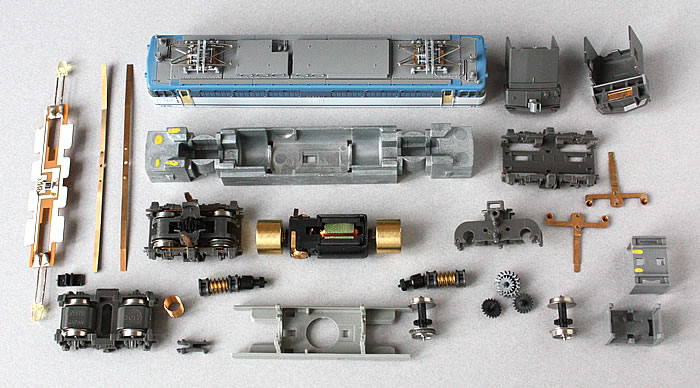
主な部品の分解状態を上の写真に示します。 ダイカスト製のフレームは一体的に作られているタイプであり (左右あるいは上下に分割されていない)、刻印は 3017 であった。 モータとジョイント、およびウォームを右の写真に示す。

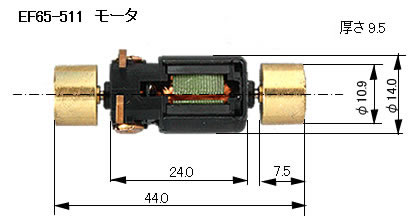
このEF65 シリーズは、他のシリーズよりも車体全長がやや短いため、動力機構のジョイント部を工夫して(犠牲にして?)短縮し、他の部品の共通化を図っている様である。 モータは、フライホイール付きで、2ポール5スロットのスキュー無しマグネットモータである。 その寸法を下に示す。 EF510-1 と形状的には同じと言える。
 .
.
また、 ウォームの軸受けはダイカスト製のフレームに直接はめ込む方式である。 この方式のほうがオリジナルで、第1弾で報告したEF510-1 の方が変形タイプであるように思う。
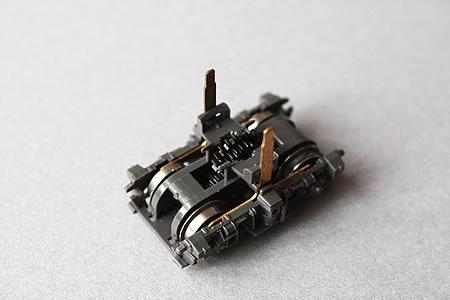
動力台車の全体を左の写真に示す。 歯車ケースの品番は 3010 であるが、下のカバーは 3017 の刻印があった。
歯車の構成は、第1弾で説明したEF510-1と同じ構成であるが、仕様が少し異なっている。 ウォームは m = 0.4 の1条ネジで、ウォームと噛合うホイールは Z = 19 である。 このホイールは2段歯車となっており、アイドラギヤを介して動輪につながる歯は Z = 17 であるが m = 0.3 で作られているので外形はかなり小さくなっている。 そして、動輪の歯車は Z = 17 であるので、動輪とホイールの回転は同じとなり、動輪を1回転させるためにはウォームを19回回転させる必要があるので、減速ギヤ比は i = 19 のギヤ列を構成していることになる。 動輪径は、φ7.4mm で、内側の片方の動輪にトラクション・ゴムを履いている。 その他の諸元として、車体重量は 99.0 グラム、前後の台車の動輪に掛る荷重はそれぞれ 44.5 グラムであった。
■02 ライト基板の特性調査
まず、電気回路上、モータと並列に挿入されているライト基板の特性を調査しておこう。
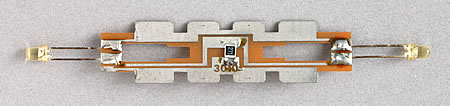
この基板は、裏側のみに回路が形成されている。 両端には前後のライト用のLED が半田付けされており、 このLED と直列にチップ抵抗も半田付けされている。 テスターで測定すると、およそ270Ωであった。 品番は3010 である。
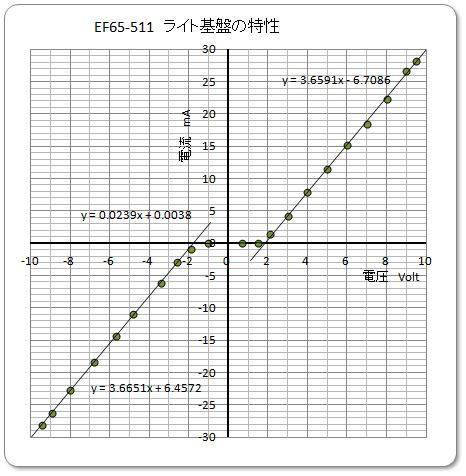
この中央付近の導線部をクリップで挟み、電圧を掛けながら電流を測定したのが右のグラフである。 2 Volt 近くになるとLED が光り出すと共に、電流は一直線状に上昇する。 極性を反転しても同様な傾向を示し、対称な特性であることが判る。 電流の上昇勾配は 3.66 mA/Volt である事から、約273Ωとなり、チップ抵抗の実測値と合致する。 電流の立ち上がりはおよそ 1.8Volt で、それまではわずかに電流が上昇しているが無視出来るであろう。
■03 モータ単品の速度特性とトルク特性の調査
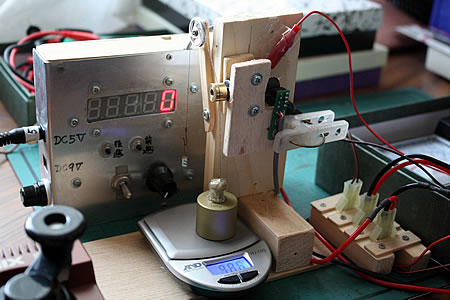
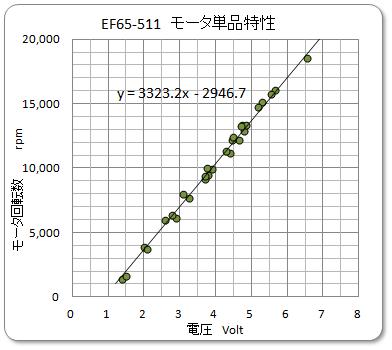
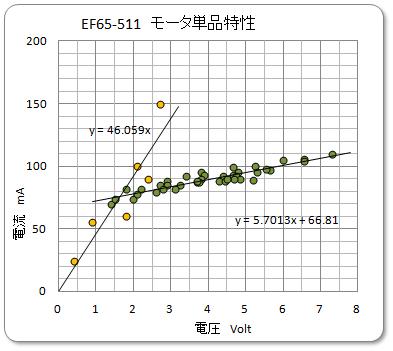
単品状態でのモータを測定する。 測定方法は、「モータのトルク特性を測定 その2」にて報告した方法で実施した。 測定状態を上に示す。 最初に、速度特性として、モータに負荷を掛けないフリーの状態で、電圧と電流、および回転数を測定した。
次に、負荷を掛けた状態で、トルク特性を測定した。 モータの端子電圧をパラメータにして測定するのだが、今回はモータ特性のモデル化を目的に測定しているので、この電圧を厳密に保持する必要が無くなってしまった。 パワーユニットのダイヤルをある程度合わせたら、そのままの状態でモータの負荷を変化させて測定している。 負荷としての重りを何種類か取り替え、さらに滑車レバーの角度を変えて、即ち糸の接触角を変えることによって負荷を変えることが出来た。 この負荷変動によって電圧は0.5ボルト近く変動するが、最初の電圧設定のままで測定を続けた。 勿論電圧値も測定データとして読み取っている。 そしてデータ群として約 3、4、5、6Volt の4種類の状態を測定している。 測定データを下に示す。
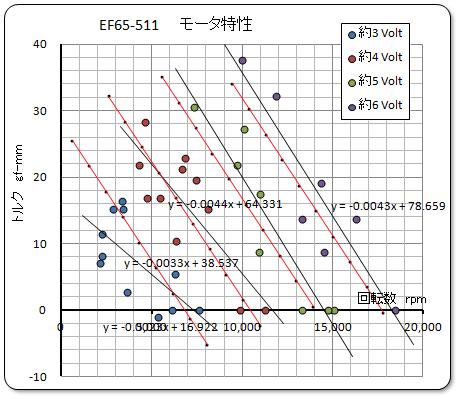
このデータ群をあえて直線近似式にあてはめて黒色の線で表示しているが、3ボルトや4ボルトではさすがに無理である。 しかし、5ボルトと6ボルトでは揃っているのでその係数を参考値にして、モデル化の係数探索に利用した。 また、赤色で示したラインは、下記のモデル化によって計算した線図で、3.0 、4.0 、5.0 、6.0 Volt の場合の特性をプロットしている。
■04 モータ特性のモデル化
モータ特性の計算モデルは、モータの端子電圧と電流値から、その時のモータの回転数と出力として発揮しているトルクを計算で推定しようとするものである。 このための式は、第1弾でも説明したものと同じ式を使用する。
即ち、端子電圧を E 、電流値を I とすると、モータの回転数 Nm と、モータ出力トルク Tm' は下記のとおりとなる。
Nm = ( E - Eb - Ra・I ) / Ke
Tm' = Kt・I - λm ( E - Eb - Ra・I )/ Ke - Rm
この式の中の定数として、トルク定数 Kt 、逆起電力定数 Ke 、巻線抵抗 Ra 、ブラシ部の電圧降下Eb 、モータ軸の固定摩擦 Rm 、その回転数係数λm を求めておく必要があるので、前記の測定データをもとに計算し、測定値に合ってくる数値を当てはめるて行った。
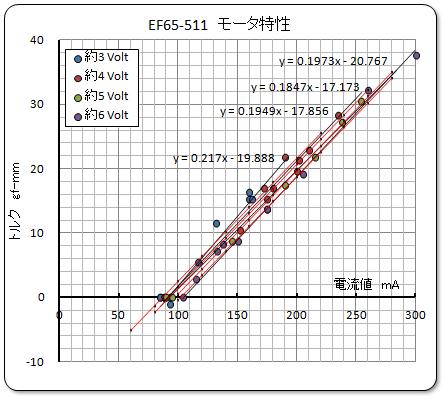
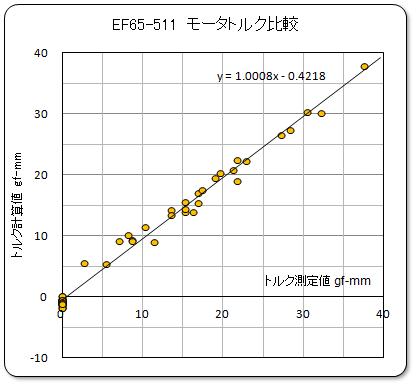
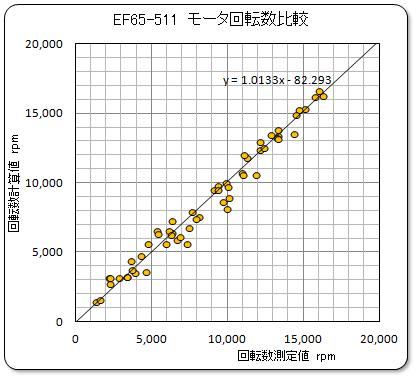
その方法は、定数をある程度推測しておき( 例えばEF510-1のデータなど )、その値を使って、測定データをまとめた Excel の表ソフトで計算する。 実測値の電圧と電流をもとに、モータトルクと回転数を計算し、実測値と計算値を比較しながら、定数を修正していくものである。 その比較は、下記のようにグラフを描きながら、1:1になる様に推定していくのである。 バラツキと直線性を見て行く。
定数が多いので、まず回転数を見ながら Eb 、Ra 、Ke 、を決める。 そして、トルクを見ながら Kt 、λm 、Rm を決めて行く。 作業は意外と簡単である。 測定値自身の信頼性もあるので、バラツキ程度などはある程度の妥協が必要である。
そして、定数としてもっともらしい値に落ち着いたのは、Kt = 180、 Ke = 0.000258、 Ra = 12、 Rm = 14、 λm = 0.0003、 Eb = 0.1 となり、その時の測定値と計算値の関係は下のグラフの通りである。 これらの定数は、計算値と実測値が良く合致すると言うだけで、本来の物理的値とかけ離れているのではないかと言う心配はある。 しかし、物理的数値を追求するのが目的ではないので、これで良しとしている。 また、先回のEF510-1 と比較して、モータ仕様が変更されているのか、あるいはバラツキの範囲内なのかは、まだデータ不足なので判断が付かない。
次にこれらの定数を使って、動力伝達部の効率などを求めることにする。