
HOME >> 動力車の調査 > KATO EF65-511 その1 その2
動力車の調査 KATO EF65-511 その2 修正版
■05 電気回路の電圧降下
電気回路の電圧降下について、有効な測定方法が見つからないので、車両特性の計算の中で、適切 に推定することにする。
■06 車両での速度特性の測定
走行特性を測定するため、車両を再び組付けたが、この時、ライト基板をダミーのプラ板に取り替えて測定を実施することにした。 これは、ライト基板への電流分離を無くすことにより、モータに流れる電流を供給電流と一対一に対応することによって、特性解析をより詳しく実施しようとするものである。 特に、電気回路の電圧降下量の推定については少しは信頼性がアップすると考えている。

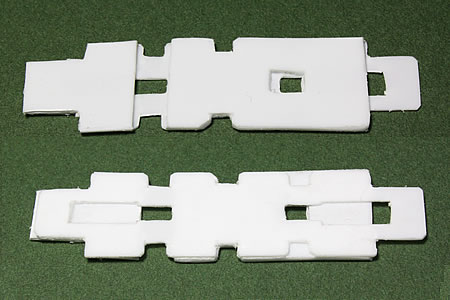
製品のライト基板は、厚さが0.5mm のベーク板に電気回路がプリントされている。 このベーク板は腰が強いため、薄くても丈夫であるが、同じ厚さのプラ板で作ると、フニャフニャで、集電板を充分に押さえる事が出来なかった。 そこで、さらに厚さ1.0mm のプラ板を当てがって補強している。 そして、取付た後に、さらにセロテープで浮き上がりを防止している。 ボディーは少し干渉するので、ただ単に被せている状態で走行実験することにした。
また、モータのウォームアップを兼ねて、速度と電流の時間変化も測定することにした。 条件は、重り車両を牽引した坂道路走行状態とし、70パーミルの勾配で牽引力が 16.8 グラムの登坂状態で速度と電流を測定した。 電圧は 5.0 Volt に設定している。 小判形の周回路のため、登りがあれば当然下りもあります。
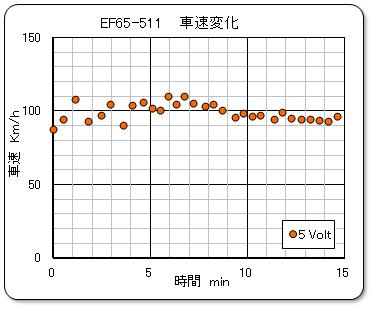
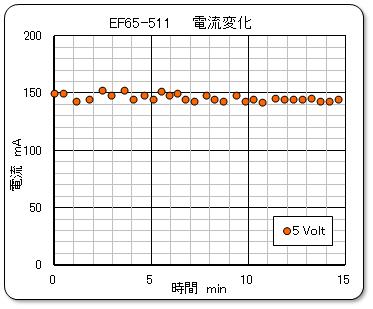
最初は、速度も電流もバラツイていたが、10分も過ぎるとその変化も小さくなり、落ち着いてきたようである。
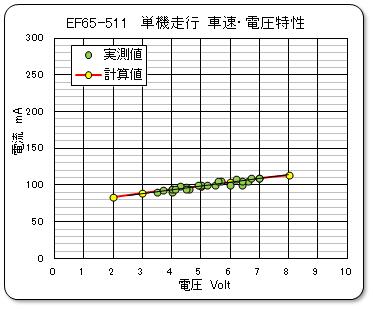
次に、平坦路単機走行での速度特性を示す。 今回は、傾斜台を使用した牽引力測定と同時期に実施したので、「モータの回転変動」で述べたホームストレッチの長い周回路を使用しなかった。 また、ブラシ修正後に測定したライト基板付きの走行データと比較したものを下のグラフに示す。
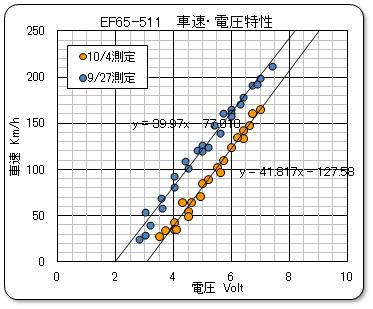
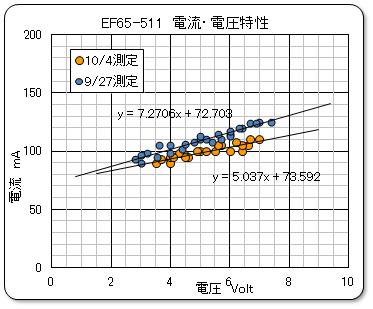
ライト基板が無いため、その分の電流がすくなっているのは当然であるが、速度まで落っこちているのは解せないのだが・・・・・・・・・。 電流値の差は、ほぼ理屈通りであるので、モータの負荷が増えたとも考え難い。 車輪の汚れも無かったので、どこかの接触抵抗が増え電圧降下がひどくなったのとしか考えられないのである・・・・・。
■07 牽引力特性の測定
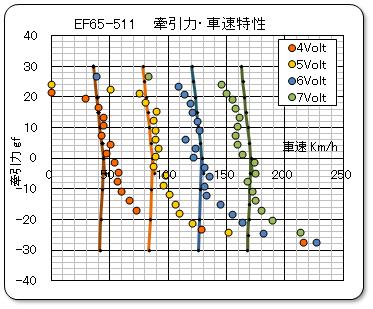
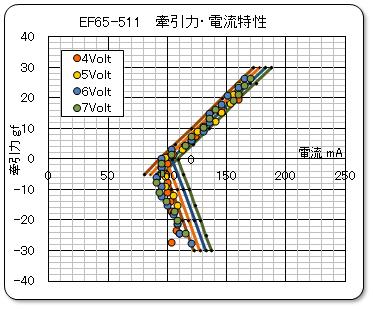
次に、牽引力特性を測定し、その結果を下に示す。 今回から、パラメータとしての電圧設定は、設定値が±0.05 volt 以内を保つようにダイヤル調整を実施している。 パワーユニットの微妙な設定違いや測定誤差などにより、プロット点は少しギクシャクとした並びになってしまったが、計算値との比較のためにはこの方がベターと判断する。
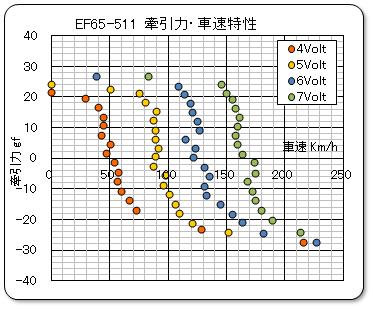
ライト基板の撤去や、より厳密な電圧設定により、整ったデータが得られたが、低速でのバラツキが大きくなったようである。 また、先回の牽引力の測定値では、40グラム近くも測定されたが、やはり測定ミスのようであり、お詫びいたします。 他の車両との横並びを見ても、25グラム前後が妥当な値の様である。 また、制動側の挙動も今までとは少し異なっている動きをしめしている。 トラクションタイヤがへたってきているのかな?
■08 車両特性の解析
次に、計算モデルを活用して車両のいろいろな特性を解析してみよう。
1) 単機平坦路走行時の特性
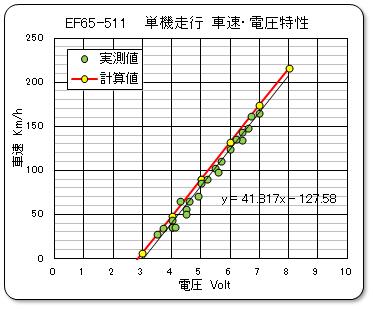
伝達効率が100%と仮定した場合に車速を実測値と比較したものが、下の左のグラフである。 電流値から推定したモータの出力トルクを伝達系の損失トルクと考え、それをグラフ化したので下の右のグラフである。
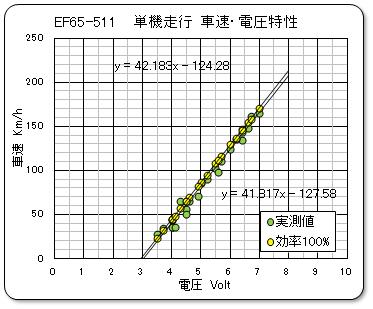
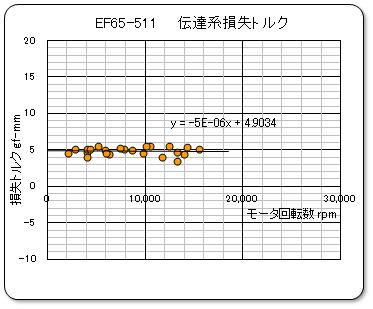
伝達系の損失トルクを示す右のグラフより、損失トルクは速度に殆んど影響していない様であるが、このグラフの直線近似式より、速度項λd はλd = -0.000005 と推定する。 そして、この損失トルクをもとに、単機走行状態を計算した結果を、実測値と重ねて表示したものを下のグラフに示す。 ほぼ計算はマッチしていると判断出来る。
2) 牽引力特性
次に、牽引力特性についても、効率100%の場合を計算し、伝達系の効率と速度差を下のグラフに示す。
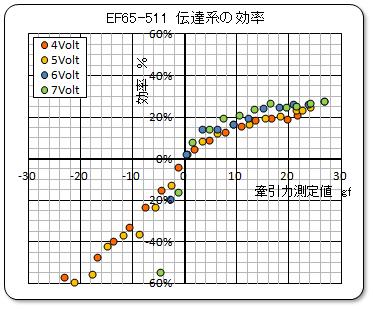
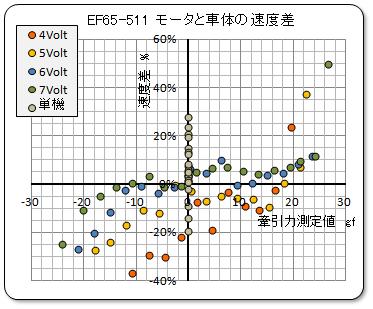
この効率のグラフについて、駆動側に於いてはそれらしき値を示しているものの、制動側では今までの例とは少し異なっており、その原因は良く分からない。 また、速度差のグラフについては、相変わらずバラバラのデータとなっている。
3) 駆動系損失の分析
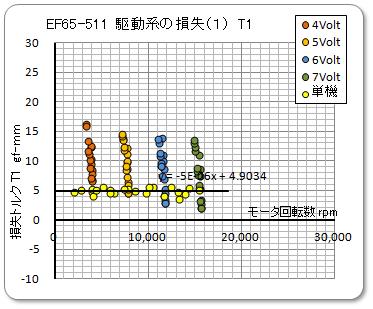
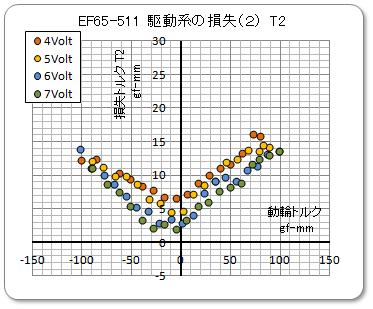
次に駆動系の損失トルクを推定する。 損失トルク T1 をウォーム軸の回転数、即ちモータ回転数を横軸にしてグラフ化したのが、下の左のグラフである。 そして、このT1 から速度項を差引いた T2 の値を動輪トルクを横軸にグラフ化したのが、下の右のグラフである。
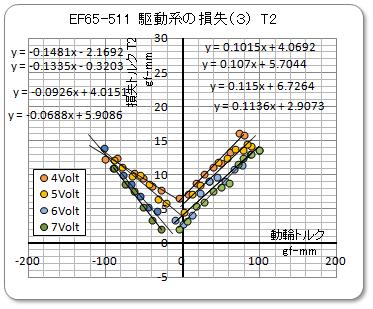
次に、T2 のデータより、左右の勾配を求めるため、グラフ表示をすこし細工する。 その結果を下の左のグラフに示す。 直線近似の勾配値を平均して、駆動時の抗力項の係数R7 は、R7 = 0.109 、制動時の抗力項の係数R7 は、R7 =-0.111 と推定出来る。 そして、このT2 より、今求めた抗力係数によって計算された抗力項を差しい引いた損失トルクを下の右のグラフに示す。
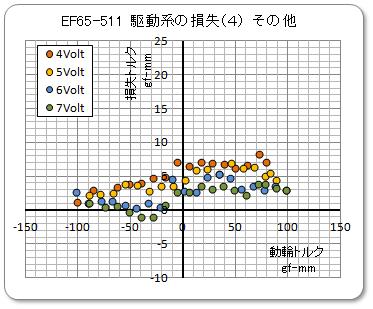
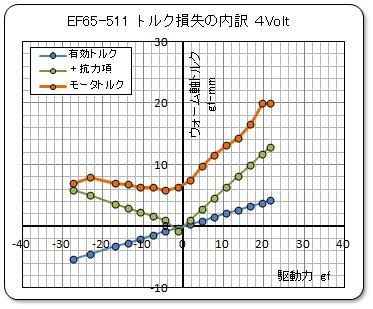
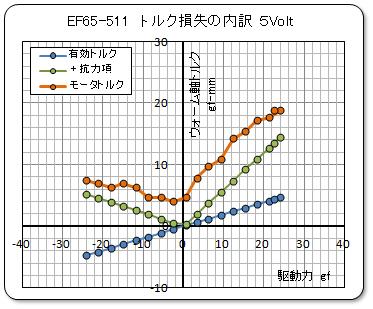
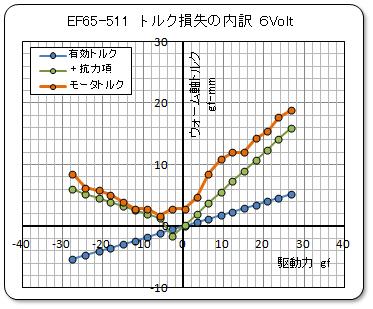
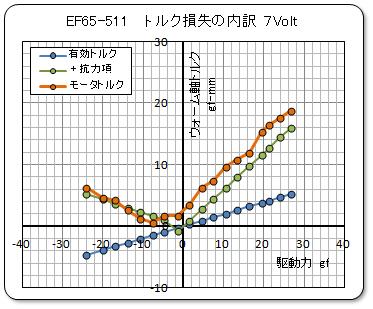
4) 損失トルクの内訳
上記の駆動系損失の分析で求めた各損失項を分かり良く表示するために、各電圧パラメータ毎にグラフ化する。 グラフの見方は「車両の静的特性のモデル化と特性解析」を参照下さい。
 .
.
5) 電圧降下量の推定
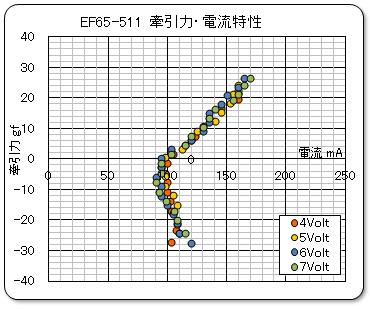
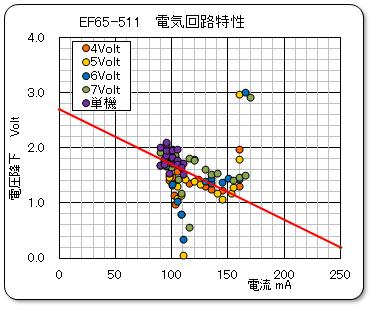
次に、集電回路の電圧降下を推定してみよう。 車速や供給電流値から計算した電圧降下のグラフを右に示す。 今回の測定に際してはライト基板を取り去って測定しているため、電流値の値は供給電流の測定値そのままとなるため、データの信頼性はアップしたと考えている。
この右のグラフをみて、電流に対して右下がりであるのに驚いている。 電流が高くなると電圧降下が小さくなる・・・・・・・・?
右端で大きく上がっている事や、左端でドスンと下がっているのは、スリップによって車体の速度と動輪の回転数がずれてくるための計算誤差であるので、この現象は考察の対象外としておく。
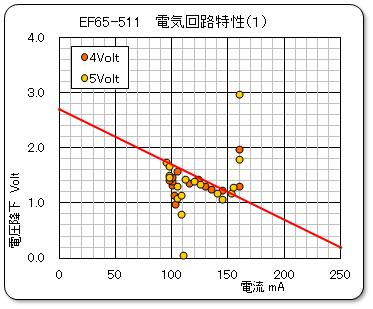
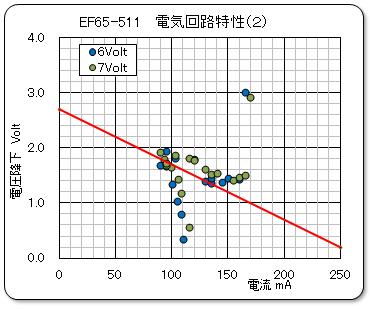
パラメータ毎のプロット点が重なっているので、分けて表示したのが、下のグラフである。 このグラフを見ても、スリップの小さい領域ではやはり右下がりのパターンである事が判る。 そこで、これらの真中をエイヤーと引いた赤線を電圧降下の特性線図として見た。
その結果、本当だろうか・・・・・と思いつつも、R5 = -0.01、 R6 = 2.7 と推定した。 それにしても、1.0〜2.0 ボルト近くも電圧降下が発生しているとは・・・・・・・・・!。 これも驚きである。
この電圧降下の推定方法は、今後多くのデータを集めて、検証していきたい。
6) 牽引力特性の計算結果
ここでは、推定した定数を使用し、モデル化したモータと車両の特性式のよって牽引力特性を計算し、測定データのグラフの上に重ねて表示する。 これにより、計算式と定数の確からしさを検証しようとするものである。
■09 まとめ
この車両の動力特性に関する諸元をまとめて一覧表に表示する。
| EF65形 直流電気機関車 | メーカー/品番 | KATO/3017-3 | 車両番号 | EF65-511 | 製造年 | 1992年 | ||
| 車体諸元 | 車両重量 | 99.0 | 前台車荷重 | 44.5 | 後台車荷重 | 44.5 |  |
|
| 台車中心間距離 | 66.0 | 台車軸距離 | 17.5 | |||||
| モータ諸元 定数 | モータ構造 | 2P5S、θ=0 | フライホイール諸元 | φ10.9*7.5-2 | マーキング | なし | ||
| 逆起電力定数 Ke | 0.000258 | 巻線抵抗 Ra | 12.5 | ブラシ部電圧降下 Eb | 0.025 | |||
| トルク定数 Kt | 225 | 摩擦トルク Rm | 15.0 | 摩擦損失速度係数 λm | 0.0003 | |||
| 伝達機構 | ウォームモジュール m | 0.4 | ホイール歯数 Z | 19 | 動輪軸歯数 Z | 17 | ||
| ギヤ比 i | 19.0 | 動輪直径 D | φ7.4 | 車輪形状 | 通常形状 | |||
| 各種定数 | 電圧降下係数 R5 | -0.01 | 電圧降下係数 R6 | 2.7 | ライト基盤係数 R3 | 3.66 | ライト基盤係数 R4 | 6.71 |
| 速度係数λd | -0.000005 | 抗力係数駆動 R7 | 0.109 | 抗力係数制動 R7 | -0.111 | 固定項係数 R8 | 4.9 | |
| 基本単位 | 長さ mm、 重さ gf(グラム )、 回転数 rpm、 電圧 volt、 電流 A、 抵抗 Ω、 スケール速度 Km/h、 ただしグラフの電流値は mA で表示。 | |||||||
(注記) これらのデータは、ホビーとして個人が手持ちの車両を測定したものであり、その信頼性は保証いたしません。
牽引特性などの実測値と計算値とは、かなりピッタリと合って来ており、計算モデルと推定した定数は信用出来ると考える事ができる。 そして、他の車両の定数と比較することによって、この車両の特徴を示すことが出来るものと考えている。
しかし、制動領域では、測定値と計算結果とのズレが生じており、未知の現象が発生していると考えるべきであろう。 それは、車輪のスリップ現象ではないかと睨んでいるのであるが・・・・・・・・。