
HOME >> 動力車の調査 > KATO EF81-119 その1 その2
動力車の調査 KATO EF81-119 その2
モータ単品での調査に引き続き、車両特性の調査を実施し、伝達系の効率を求める。
.
■05 電気回路の電圧降下
電気回路の電圧降下について、いままでそれらしく調査したが、結局は活用出来るデータは得られなかった。 接触抵抗の不安定さが原因と思われる。 モータのフライホイールは、慣性走行用では無くて、この接触抵抗の不安定さを解消するための対策であることを思えば当然かも知れない。 そこで、適切な測定方法が見つかるまではこの電圧降下の調査を中止することにした。 その代わりに車両特性の計算の中で、適切 ( いや、適当かな?・・・・・)に推定することにする。
■06 車両での速度特性と牽引力特性の調査
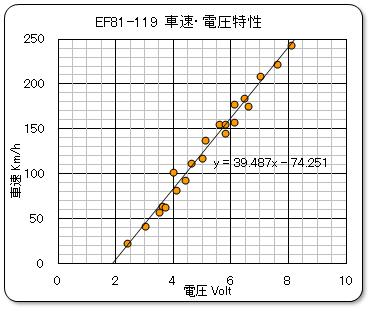
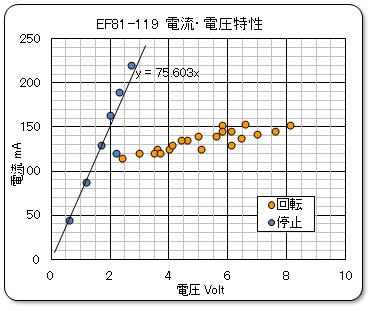
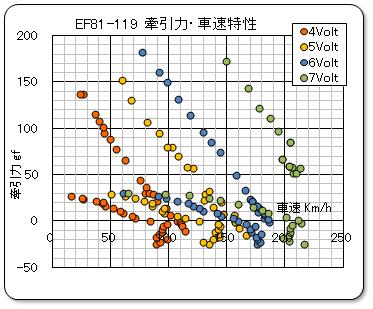
車両状態での速度特性と牽引力特性を測定する。 まず、車両単機での平坦路走行特性を下のグラフに示す。
 .
.
ここで、左のグラフに示すように、電流値がモータ単品状態での電流値と殆んど同じレベルなのが、気になる点である。 減速機構の摩擦抵抗が殆んどゼロであるということなのだろうか。
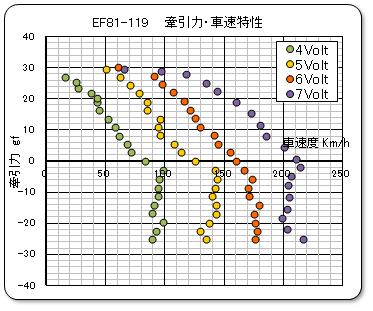
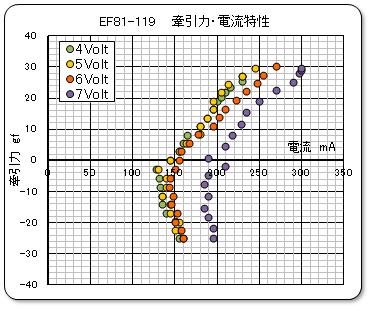
次に、負荷状態での動力特性を下に示す。 3 Volt では、走行が不安定であったので、4 Volt から始めている。
.
パラメータとしての電圧は、厳密には表示通りではないので、今後の測定では面倒でも改良した方がよさそうである。 また、7Voltでの電流が外れているののも気になる点である。 そして、このグラフより、粘着限界での牽引力は、およそ30グラムであることも読み取れる。
■07 車両特性計算への挑戦
モータのモデル化には目途が付きつつので、今度も車両特性を考えて見ることにした。 計算式は、モータの端子電圧とモータに流れる電流値より、モータの回転数と出力トルクを求め、ギヤ比と動輪径より、車速と牽引力を求めるものである。
モータに流れる電流は、供給された電流からライト基板に流れる電流を差引いて推定するのであるが、この車両ではLED が故障していたので、ライト基板を流れる電流はゼロとして計算している。 なお、測定終了後に、手持ちのLEDに両方とも交換している。 また、電圧降下量は計算途中で検証しながら仮定値を入れている。
上記の測定データを整理し、今まで求めてきた計算式をもとにしてEXCEL 上で車速と牽引力を計算するシートを作成し、計算結果をグラフの一覧表にして、測定値と計算値の合致具合を見て行くことにした。 モータの変数は、前の章で求めた定数を使用し、同じ式を使用して計算している。
1) 単機走行時の特性
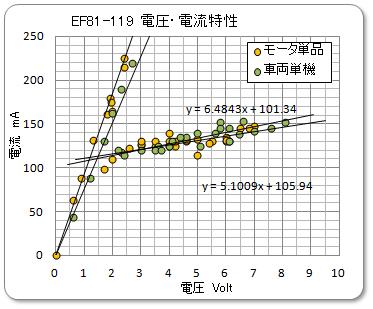
伝達効率が100%と仮定した場合に車速を実測値と比較したものが、下の左のグラフである。 モータの回転と車速の関係は、伝達効率に関係なく厳密に1:1であるはずである。 この違いは、車輪のスリップとも考えれれるが無負荷走行の場合では考え難い。 その原因として、駆動系の摩擦抵抗と電気系の電圧降下が考えられる。 そこでまず、駆動系の摩擦抵抗については、実測された電流値からモータモデルによりモータの出力トルクを計算し、その値を伝達系の損失トルクと考えてグラフ化したので下の右のグラフである。
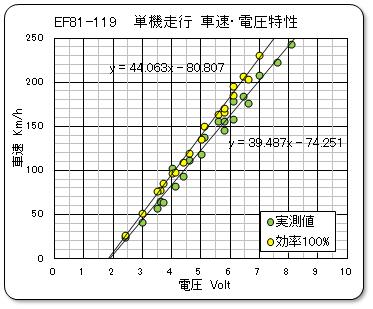
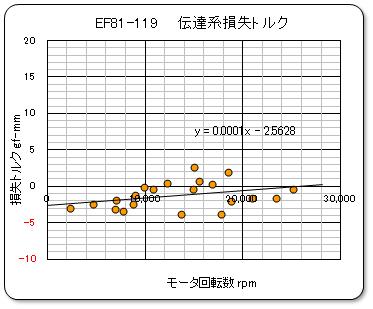
この損失トルクのグラフを見ていると、データのバラツキは大きいが、エイヤーとみれば回転に応じて比例的に増加している部分もあるが、ほぼ一定と見る事も出来るし、さらにマイナス側であることは意外である。 マイナスの損失はあり得ないので、損失トルクはゼロであるとしか言いようがないのである。
しかし、モータ単品での摩擦トルクが30〜40 gf-mm もあるのに、減速機構の摩擦トルクが殆んどゼロと言うことなのだろうか。 モータの場合はマグネットによる磁力によって抵抗 (コギングトルク) があるとの事であるが、これほどまでに差があるのだろうか、疑問を持ったままである。 しかし、この損失トルクがゼロであることを使って車速と電流値を計算ししたものが下のグラフである。
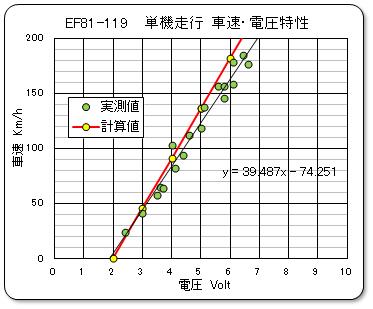

このグラフの計算の時には電圧降下量も見込んで計算している。 今までの例を参考にしていろいろ数値を入れて見ながら、上のグラフの計算値と実測値がマッチングするように探っていった。 さらに、下に示す「モータと車体の速度差」も見ながら、理屈的にかけ離れた数値にならないように制約も付けて行った。 この結果、電圧降下量を計算する式の係数としては、下の値がよりマッチングする数値と判断したので、この値を使って計算することにした。
電圧降下量(Volt) = 0.001×電流(mA) + 0.1
100mA 〜 150mA の間では、0.2 〜 0.25volt の電圧降下量となるが、やや少ない様な気がする。
前に、単機走行時の電流値がモータ単品状態での電流値と殆んど同じレベルなのが、気になる点であると述べたが、減速機構の摩擦トルクが本当に小さいのか、電圧降下量の不安定性なのか、あるいは不安定なモータによる測定データの変動なのか、判断が付かない状態である。 でも、データ解析を続行することにする。
2) 牽引力特性
次に、牽引力特性についても、効率100%の計算結果をグラフ化した。 下に示すが、その実測値からかけ離れていることに注目しておこう。

この効率100%計算結果を元に、伝達系の効率と速度差を下のグラフに示す。
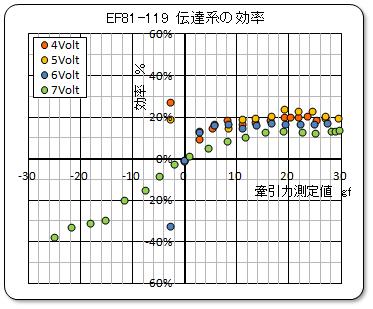
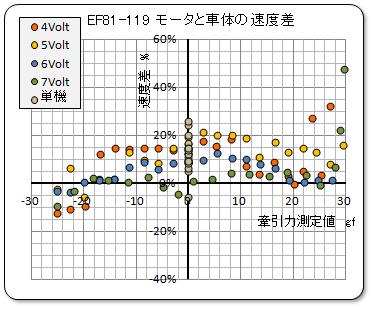
伝達効率は、主に電流値からトルク関係を計算しているので、やや信用しても良いだろう。 しかし、車速などの速度系は、主に電圧関係から計算しているので、あやしいデータとなっている。 駆動力の小さい領域で、動輪が10%前後も滑っているとは思えないからである。 モータモデルの不備もあるが、一番の問題は正確なモータ端子電圧が把握できていない事ではないかと判断している。 牽引力を測定中に、モータあるいは動輪の回転数でも正確に測れれば良いのであるが・・・・・・・。
.
3)駆動系の損失とは
伝達系の効率が低いのは何故なのか、さらに突っ込んで解析することにした。
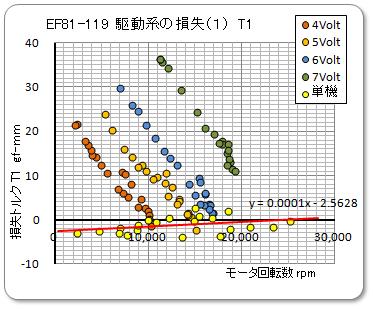
まず、動輪に掛る実際の駆動力をギヤ比で割ってウォーム軸上の換算トルクとすると、このトルクは、有効に動輪まで伝達作用された有効トルクと見る事が出来る。 そこで、電流値から計算されたモータの出力トルクを駆動機構の入力トルクと考え、換算した有効トルクの差は、駆動機構で失われた 「駆動系の損失」 と見る事が出来る。 そこでこの値をT1として計算し、モータ回転数を横軸にグラフ化したものが、下の左のグラフである。
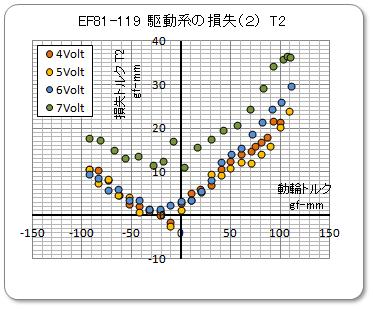
ここで、単機走行時は車両の負荷が無いため( 駆動力や制動力はゼロである )、その損失トルクは駆動力や制動力に関係しない、ただ単に速度のみに影響する損失項と考え、速度項(または回転数項)として差し引いて計算されたトルクをT2として、グラフ化したのが下の右のグラフである。 とは言っても、単機走行時の損失トルクはゼロと判断している( 損失トルクのマイナスはあり得ない )ので、速度項はゼロとして計算している。 この時の横軸は動輪の駆動トルク( および制動トルク )に取っているので、駆動状態と制動状態が横軸の上で、右と左に分かれる事になり、その状態での違いが判明出来る。 そしてこのグラフより、損失トルクがこの動輪トルクに比例している事が明確になってくる。
そこで、その比例定数を求めるため、グラフのプロット点を直線近似させたのが、下の左のグラフである。 7voltは少し変だので除いてある。 右上がりの勾配が駆動時の係数で、左上がりの勾配が制動時の係数ということである。 電圧によって少し変化するが、それぞれの勾配を平均することにした。
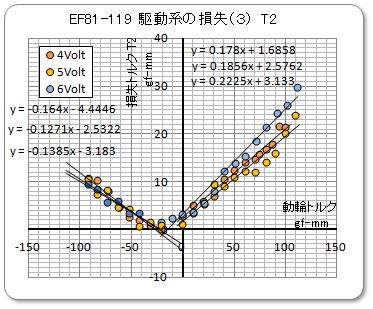
この係数の平均値は、
駆動側で、 0.1954 制動側で、 - 0.143
と計算された。 この係数は、力に比例する摩擦力と同じ考えとなり、摩擦係数μに相当する係数でもある。 その値としても納得出来る値である。 そこで、この項を抗力項と呼ぶ事にする。
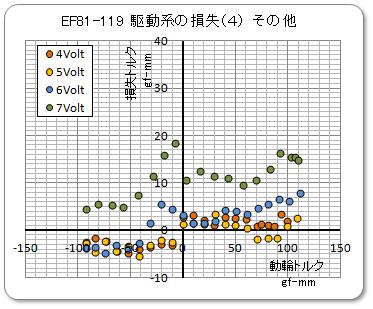
さらに、T2のトルクから、この抗力項をさし引いた残りの損失を、上の右のグラフに示す。 動輪トルクのプラス側、即ち駆動側ではプラスのいくらかの一定のトルク、制動側ではマイナスの一定のトルクが残ったことになる。
***********************************
これらの解析結果について、グラフからではいまいちピンと来ないので、グラフの表示方法を工夫してみた。 モータから作用したトルクが有効に動輪まで達した有効トルクと、それに抗力項をプラスしたもの、および、モータトルクを重ねてグラフ化したものを、電圧パラメータ毎に作成した。 各線図に囲まれた部分が、有効トルク分、抗力項、残り分を示すことになる。
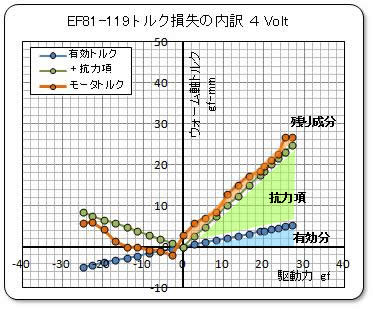


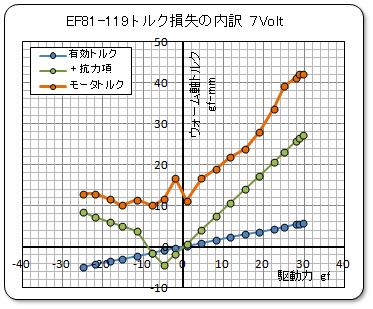
こうして見ると、モータの出力トルクの多くは、抗力項に消えていることが分かる。 この原因はウォームギヤに有ることは明らかであろう。 普通の平歯車はコロガリ接触で力を伝達しているが、ウォームギヤは直交に交わる運動方向での滑り接触によって力を伝達している。 このため歯面の抗力による摩擦抵抗によって、その損失量が大きいのである。 そしてウォームギヤの伝達効率が20%程度であることも理解出来る。
制動側での線図の動きも面白そうである。 「制動領域での動力特性」での考察と比較しながら検討するのも今後の課題としよう。 そして、6volt から 7volt にかけてのモータトルクの動きも注目して行きたい。 まずは、N増しして、このモデル特有の現象(測定不良も含めて)なのか、或る原因によるのかも課題となろう。
4)牽引力特性の計算結果
伝達系の損失量が計算出来ることが分かったので、モータのモデルと合わせて、車両の動力特性が計算出来るはずである。 そこで今までの各種定数や損失データをもとに、牽引力特性を計算してみた。 その計算方法は、多少の疑似逐次近似法などの手法を必要とするが、EXCELレベルで計算できるものである。 後日報告しよう。 ここでは、その計算結果を紹介する。 電圧をパラメータにし、牽引力を設定して車速と電流値を計算し、測定データのグラフの上に重ねて表示したものを下に示す。


今回の計算では、ライト基板への電流バイパスも計算に含めている。 実測データと計算値とが概ね合致しているが、まだまだと判断する。 今後の改良は必要である。
■08 まとめ
この車両の動力特性に関する諸元をまとめて一覧表に表示する。
| EF81形 交流直流電気機関車 | メーカー/品番 | KATO/3010-1 | 車両番号 | EF81-119 | 製造年(再生産) | 1989年 | ||
| 車体諸元 | 車両重量 | 117.1 | 前台車荷重 | 51.6 | 後台車荷重 | 55.6 |  |
|
| 台車中心間距離 | 78 | 台車軸距離 | 17.5 | |||||
| モータ諸元 定数 | モータ構造 | 2P5S、θ=0 | フライホイール諸元 | φ10.9*7.5-2 | マーキング | 白 | ||
| 逆起電力定数 Ke | 0.0002276 | 巻線抵抗 Ra | 12.9 | ブラシ部電圧降下 Eb | 0.16 | |||
| トルク定数 Kt | 258 | 摩擦トルク Rm | 32.0 | 摩擦損失速度係数 λm | 0.0003 | |||
| 伝達機構 | ウォームモジュール m | 0.4 | ホイール歯数 Z | 19 | 動輪軸歯数 Z | 17 | ||
| ギヤ比 i | 19.0 | 動輪直径 D | φ7.4 | 車輪形状 | 通常形状 | |||
| 各種定数 | 電圧降下係数 R5 | 0 | 電圧降下係数 R6 | 0.4 | ライト基盤係数 R3 | 故障 | ライト基盤係数 R4 | 故障 |
| 速度係数λd | 0 | 抗力係数駆動 R7 | 0.1954 | 抗力係数制動 R7 | -0.146 | 固定項係数 R8 | 0 | |
| 基本単位 | 長さ mm、 重さ gf(グラム )、 回転数 rpm、 電圧 volt、 電流 A、 抵抗 Ω、 スケール速度 Km/h、 ただしグラフの電流値は mA で表示。 | |||||||
(注記) これらのデータは、ホビーとして個人が手持ちの車両を測定したものであり、その信頼性は保証いたしません。
動力車の調査も第5報となると、その解析手法も整理出来つつある。 今回は、駆動系の損失内容を整理する事が出来た。 しかし、今回はモータの作動が不安定であることに手こずってしまった。 中古品のせいなのか、あるいは古い設計の製品のためなのかは分からないが、不安定なモータ特性をもとに車両特性を計算しているので、計算結果の信憑性には、自信が無い。
でも、KATOの新世代を築いた新しい動力機構の解析には、それらしいデータを残せたと思う。