
HOME >> 動力車の調査 > KATO EF81-119 その1 その2
動力車の調査 KATO EF81-119 その1
動力車調査の第5弾として、KATOのEF81-119を選び分解調査することにした。 このモデルはKATO製電気機関車の新シリーズの第一弾となったモデルで、フライホイール付き動力やボディマウントスカートを始めて採用するなどの特徴を有する。 このEF81型から始まったフライホイール搭載動力ユニットの最初のタイプとして、中古品ではあるが、その動力特性を調査することにした。
■01 車両の概要
性能測定の前に、このモデルの概要と分解調査の結果を報告する。
 .
.
このモデルの詳細は、マイコレクションの EF81 119 を参照して下さい。 重複記載あり。 模型車両の特徴: フフライホイール付き動力やボディマウントスカートを始めて採用するなどの特徴を有する。 ヘッドライト点灯 。
| メーカー | KATO | 商品名 | EF81 一般色 |
| 品番 | 3010-1 | 車両番号 | EF81 119 |
| 発売日 | 1989年発売 | 入手日 | 2011年9月 中古ジャンク品入手 |
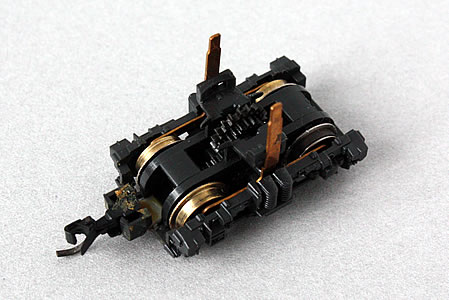
◆ 構造を理解するために、車体を少しずつ分解していきましょう。

 .
.
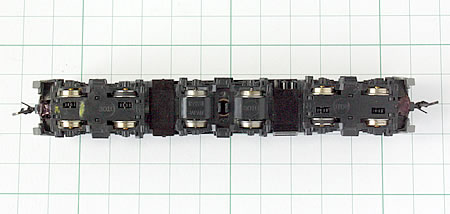
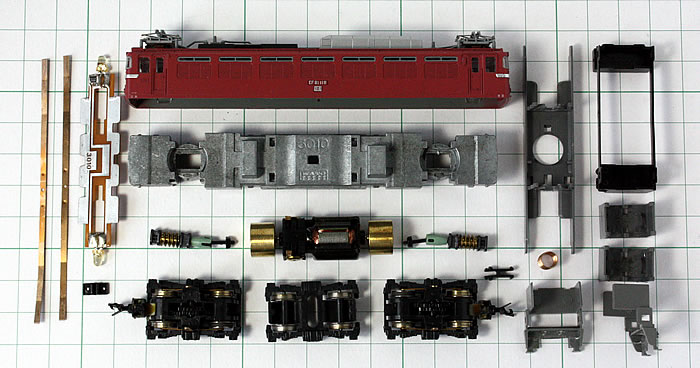
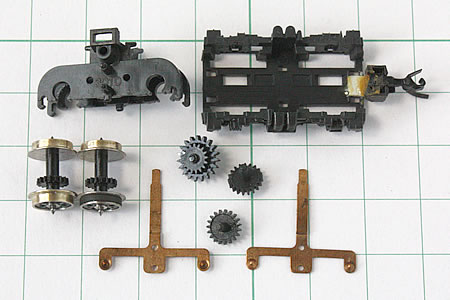
主な部品の分解状態を上の写真に示します。
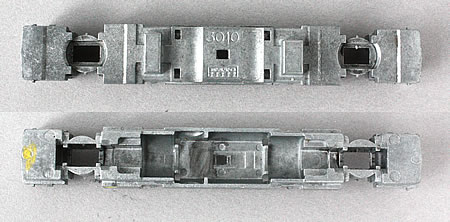
左に示す亜鉛ダイキャスト製のフレームは、一体的に作られているタイプであり 、型番の刻印は3010 である。 今までのダイカスト製フレームは、上下あるいは左右に分割されている構造であったが、今回初めて一体的な構造を採用している。 詳しくは、KATOの動力機構の変遷 電気機関車編を参照下さい。
またこのモデルにて初めてナックルカプラーをオプションで装着可能にしたモデルであったが、前の所有者によって、KDカプラーを台車に接着する加工を実施している。 そして、スカートのカプラー取り付け部が削除されていたため、本来のナックルカプラー&ボディマウント方式に戻せなかった。 残念!
また、フライホイール搭載の第1弾モデルで、モータ、フライホイール、ジョイント、ウォーム軸が一直線に配置されている。 さらに、動力台車の構造変更や、車輪からモータまでの、給電のための電気的回路構成も大きく変更されている。
この構造と部品は、その後の電気機関車の動力ユニットの標準となった。 そして、品番 3010 を刻印された構成部品は、多くのモデルに水平展開されて、LEDライトユニットや、緑色のジョイント・カプラーなどは、他の機種でも多く目にする事が出来る。
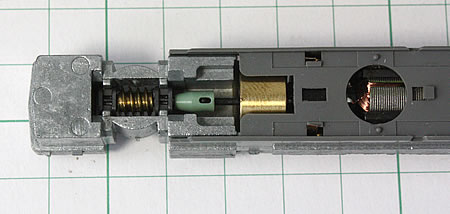
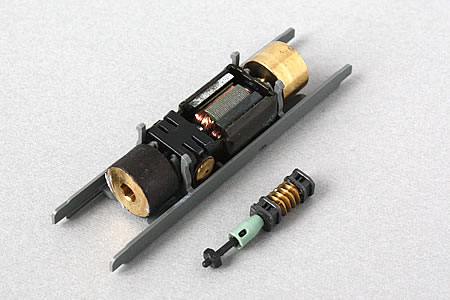
まず、モータなついて見て行こう。 モータとジョイント、およびウォームを右上の写真に示す。 緑色のカップリングやモータ支持部材などが特徴的である。
 .
.
 .
.
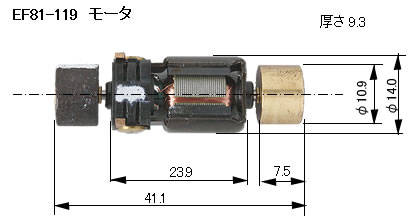
このモータは、フライホイール付きで、2ポール5スロットのスキュー無しマグネットモータである。 マグネット端部は白色の色付けがあり、何かのマーキングを思われる。 外観寸法を左に示す。
なお、測定の準備中にデータに疑問(電流値が大きい)が有ったのでモータの一部を分解した。 すると片方のブラシが右の写真の様に折損していた。 破断面はかなり擦れた跡があったので、以前から折損していたものと思われる。 ジャンク品モータのブラシと交換する。 ジャンク品は廃却せずに取っておくものだね。
 .
.
次に動力台車の全体を左の写真に示す。 歯車ケースの品番は 3010 で、台車の下のカバーの刻印も 3010 である。 この3010品番からも、これらは新規設計品であることが分かる。 この動力台車に接着されたKDカプラーが痛々しいね。 車輪もかなり酸化していたので、#1000 番のペーパーで磨いた。
歯車の構成は、ウォームは m = 0.4 の1条ネジで、ウォームと噛合うホイールは Z = 19 である。 このホイールは2段歯車となっており、アイドラギヤを介して動輪につながる歯は Z = 17 であるが m = 0.3 で作られているので外形はかなり小さくなっている。 そして、動輪の歯車は Z = 17 であるので、動輪とホイールの回転は同じとなり、動輪を1回転させるためにはウォームを19回回転させる必要があるので、減速ギヤ比は i = 19 のギヤ列を構成していることになる。
動輪軸を支える集電子のピポット部も、黒く汚れていたので掃除したが、酸化によって黒ずんでいた。 そこで、ハンダ付けに用いる金属用フラックスを少し垂らし、その後に水洗いしながらブラシで良く洗っておきます。 ほっておくと元のもくあみになってしまい、逆にひどくなってしまいます。
動輪径は、φ7.4mm で、内側の片方の動輪にトラクション・ゴムを履いている。 その他の諸元として、車体重量は 117.1 グラム、前後の台車の動輪に掛る荷重はそれぞれ 51.6 グラムと 55.6 グラムであった。
■02 ライト基板の特性調査
まず、電気回路上、モータと並列に挿入されているライト基板の特性を調査しておこう。
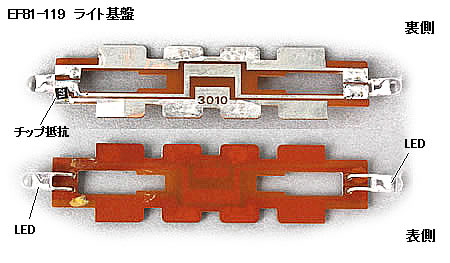
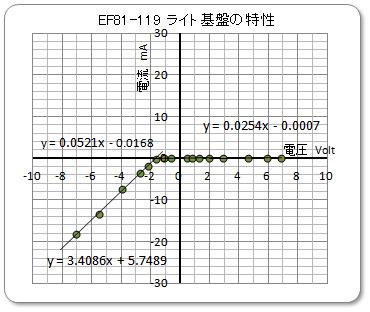
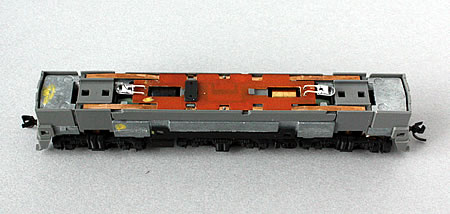
この基板は、新規に開発されてもので、3010 の刻印が施されている。 裏側にライトのための回路と、モータの端子への回路がプリントされている。 チップ抵抗は 271 で270Ωの抵抗である。 φ3mm の砲弾型LED は古くなっており、電流特性を測定しても上のグラフのように前進側は点灯せず、電流も殆んどゼロの状態であった。 また、後退側は電流は流れているが、わずかに光っているだけであった。 このため、測定終了後に、手持ちのLEDに両方とも交換している。 写真は交換後の状態である。
■03 モータ単品の速度特性とトルク特性の調査
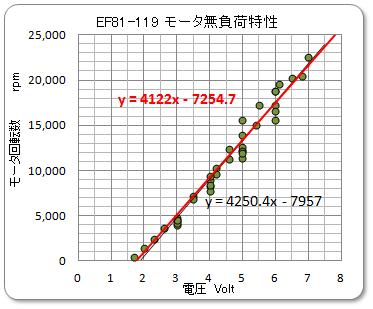
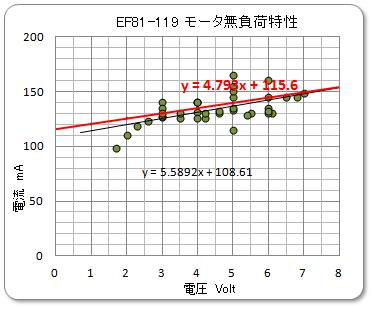
単品状態でのモータを測定する。 測定方法は、測定台へのモータの取り付け方法を改善した「EF66-51 その3」にて報告した方法で実施した。 最初に、速度特性として、モータに負荷を掛けないフリーの状態で、電圧と電流、および回転数を測定した。 なお、測定はブラシ交換を実施後に行ったものである。
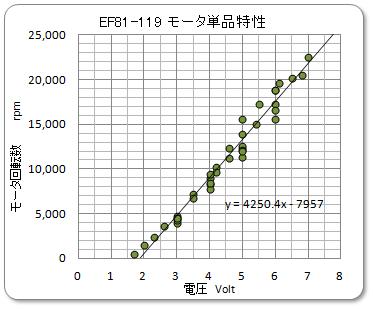
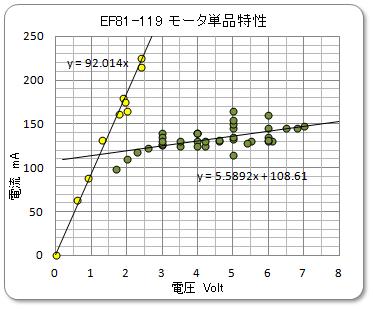
モータに負荷を掛けないフリーの状態での測定であるので、モータ出力トルクはゼロである。 この時、多くのモータと同様に、電圧を上げると(回転数の上昇に従って)電流値も増加している。 これは、回転数が変化すると、モータ内部の回転抵抗も変化する事を示しているのではないかと視察する。 ただ、無負荷状態で回転しているのに回転がふらつき、それに従って電流値も上がったり下がったりと不安定であった。 この状態を出来るだけプロットしたため、データがバラツイテいるが、これはモータ自身の回転むらである。 原因はよく解らないが、耳で聞いていても判別出来る状態である。
モータ軸を触って回転を止めた状態より、抵抗値 = 1000/92.014 = 11Ω程度の巻き線抵抗と推察する。
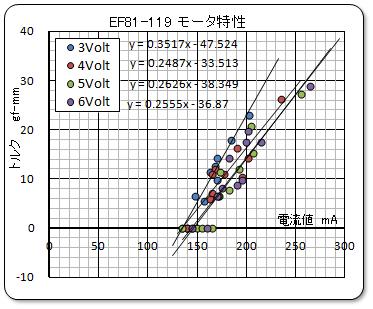
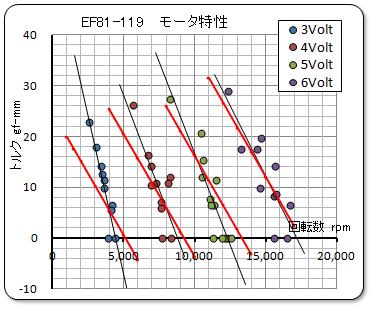
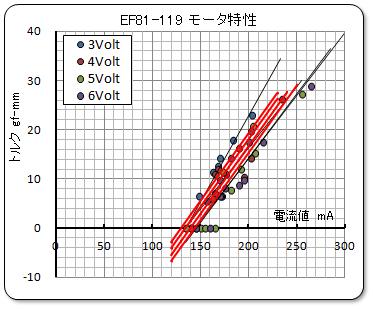
次に、負荷を掛けた状態で、トルク特性を測定した。 モータの端子電圧をパラメータにし、かつ、電圧一定の条件を保持するようにして測定した。 とは言っても厳密には行かないので、±0.1volt 以内に収まるようにしている。 データ群としては、3、4、5、6 Volt の4種類の状態を測定した。 測定データを下に示す。
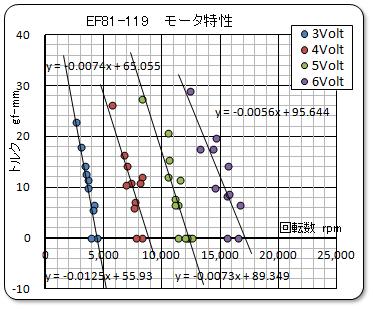
モータは不安定であったが、なんとかデータを取得することが出来た。
■04 モータ特性のモデル化
モータ特性の計算モデルは、モータの端子電圧と電流値から、その時のモータの回転数と出力として発揮しているトルクを計算で推定しようとするものである。 その解析方法は、「モータ特性のモデル化」にて報告した方法による。
1) 電圧系定数の推定
.
まず、外部電圧、電流、回転数のデータより、Ke 、Ra 、Eb の定数を推定する。 その結果、
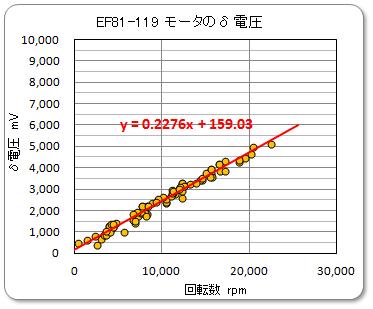
となり、定数の推定値は、 Ra = 12.9、Ke = 0.0002276、Eb = 0.16 となった。
2)トルク系定数の推定
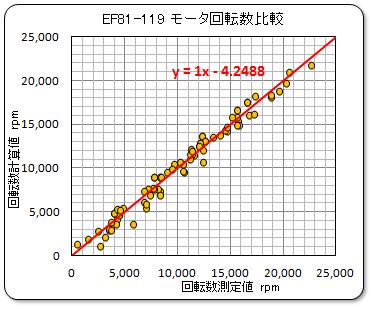
同様に、回転数 Nm 、電流 I 、出力トルクTm’のデータより、Kt 、Rm 、λm の定数を推定する。
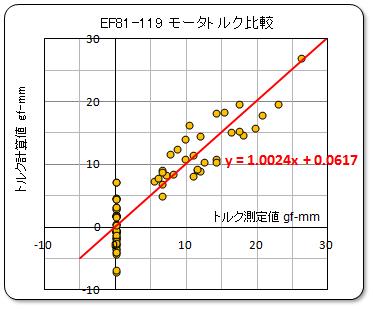
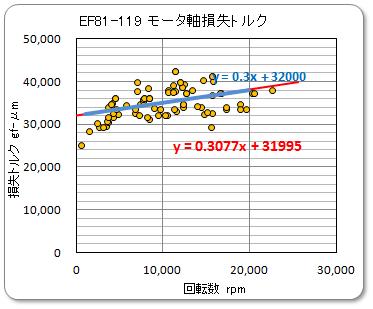
となり、定数の推定値は、 Kt = 258、Rm = 32、λm = 0.0003 となった。 トルクの計算値はバラツキが大きく、モデル化の精度は怪しいかな?
さらに、他の特性値でも測定値と計算値がマッチング状態を見ておく必要があろう。
3) 無負荷特性とモータ特性のマッチング具合
実測データのグラフの上に、推定した定数を用いて計算したデータを赤線で示す。 モータの無負荷状態での特性では、良しとする。
負荷を掛けた状態のモータ特性では、少し外れている様である。
いろいろな定数を少しずつ修正してみたが、もともとの測定データの精度もあるし、モータも不安定なので、ほどほどのマッチング具合で良しとすべきであろう。