
HOME >> 鉄道模型実験室 > 小型DCモータの調査 MercuryモータFA-130RA
鉄道模型実験室 No.273 小型DCモータの調査 MercuryモータFA-130RA
手持ちの小型DCモータについて、運転準備が整ったのでテスト測定を実施した。今回はMercury製のモータFA-130RAを測定しました。
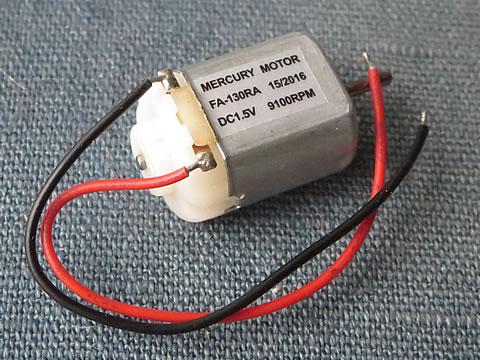
■ MercuryモータFA-130RA
今回は、Mercury 製のモータ FA-130RA-2270L を測定しました。昨年、2個入手したもので、秋月のホームページに仕様等が公開されています。その内容は、
| 定格電圧 | 無負荷 | 定格負荷 | 停止 | 形状 | |||||||
| 回転数 | 電流 | 回転集 | 電流 | 負荷トルク | 負荷出力 | トルク | 電流 | 軸径 | 長さ | 径 | |
| 1.5V | 9100 rpm | 0.20 A | 6550 rpm | 0.65 A | 8.0 gf-cm | 0.54 W | 28 gf-cm | 2.1 A | φ2.0 mm | 24.8 mm | φ20.1 mm |
です。このカタログデータをもとに特性を計算した結果を「カタログ値からDCモータの特性値を推定する」(2025/11/23)に報告しました。その値を再掲載します。
| 巻線抵抗 | 逆起電力定数 | トルク定数 | 軸摩擦 | 速度係数 |
| Ra | Ke | Kt | Rm | λm |
| 0.71 Ω | 0.000149 volt/rpm | 145.3gf-mm/A | 25.0 gf-mm | 0.000440 gf-mm/rpm |
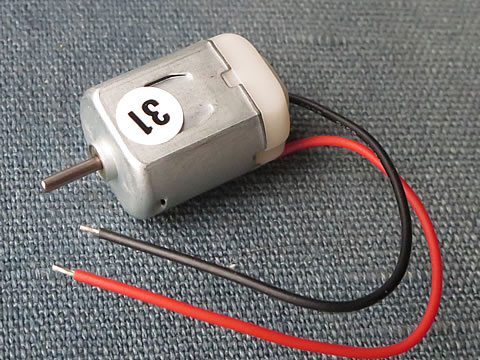
このモータは、自分の管理ナンバーとして、No.30 とNo.31 として識別しています。


■ モータの取付
このモータを測定装置のモータ取り付け台に固定します。取付方法は先回の RF146Wモータの場合と同じ金具を使用して固定しています。センサ類も同じです。
■ 測定結果
測定された結果を見ていきましょう。今回の測定は「DCモータのブレーキ特性 特性の解析 その1」(2025/12/3)で報告したように、逆起電力定数Ke を簡単に直接測定する方法も実施しました。
● ジョイント無しの無負荷運転
作動を確認して問題なければ、一度ジョイントを外してモータを無負荷で運転します。これは、モータの無負荷特性を測定するためと、トルク計のゼロ点チェックを実施するためです。
 |
 |
供給電圧が1.5voltの時: 回転数=8,063 rpm 電流= 180 mA |
 |
 |
供給電圧が1.5voltの時: 回転数=8,846 rpm 電流= 178 mA |
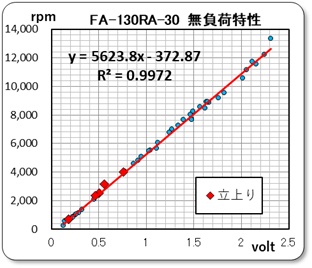
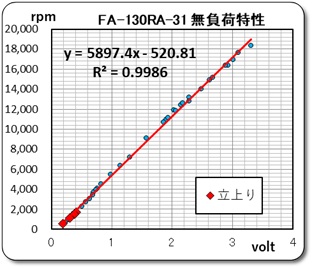
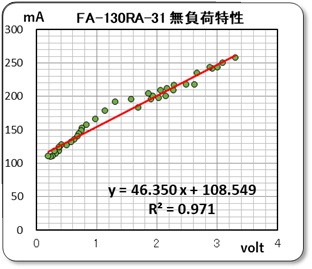
モータが回転を始める電圧は、正確には測定していませんでしたが、No.30 では平均して 0.44volt 、 No.31 では 0.33volt でした。意外とスムースな立上りです。No.30 では慎重を期して、2volt 程度までしが回転させません出来たが、No.31 では3voltまで上げてみました。
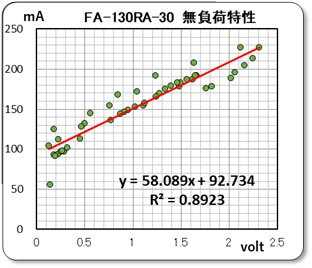
電流値の値は、Nゲージ鉄道模型用とは異なって、低電圧高電流仕様なので電流は大きめです。回転数と電流値はほぼカタログ値どうりと言えるでしょう。
● 電気回路をオープンにしての測定
次に、外したジョイントを元に戻し、今度は駆動側モータと負荷側モータの配線を取り換えます。即ち、測定対象のFA-130RAモータを負荷側モータにして、強制的に回転させます。この時の電気回路はオープン状態にしておきます。
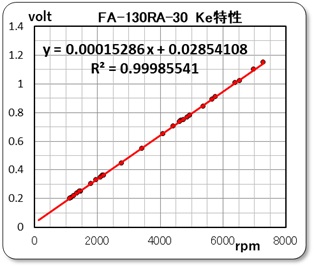
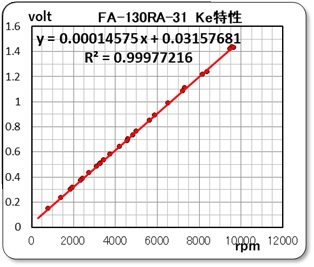
これは、電気回路がオープンですので電流は流れませんが、モータは強制的に回転させられるので逆起電力が発生するのです。この時の電圧を測定して、逆起電力定数Ke を簡単に測定する手法なのです。
 |
 |
|
|
|
電流がゼロの時、発生する電圧Eは、逆起電力定数をKe、ブラシ部電圧降下を Eb 、回転数をとすると、E = Ke・Nm + Eb となります。そこで、電圧 E と回転数 Nm の関係をグラフにして近似直線を求めます。すると、その式の勾配がKe となり、Y切片が電圧降下Eb を示すことになります。これによって求められたKe の値はカタログ値から求めた値とほぼピッタリです。また、 「カタログ値からDCモータの特性値を推定する」(2025/11/23)に示した単位の換算より Kt も計算できました。
● トルク特性の測定
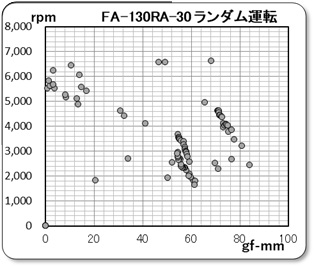
次に、トルク特性を求める測定を実施します。しかし、供給電圧をパラメータとした今までと同じ方法では、シャント抵抗による電圧降下の影響が大きくなるので、パラメータ設定を中止しました。でも供給電圧は固定している状態で、負荷条件を変化させながら回転数とトルク、および電流とトルクの関係をランダムに測定しました。
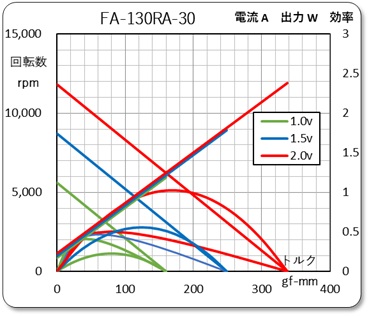
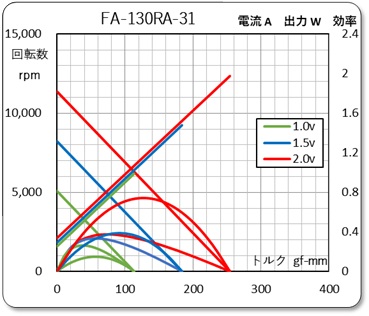
測定結果を下のグラフに示します。また、負荷回路をオープン状態とクローズド状態にしても、グラフに示すような範囲しか測定できませんでした。
 |
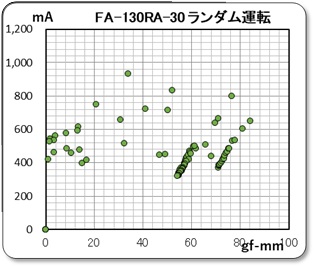 |
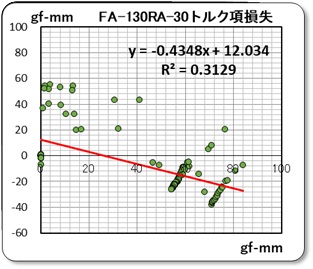
測定途中で違和感を感じながら実施ていていました。どうも様子が変でした。特に電流とトルクの関係を示すグラフが右上がりの直線に並ばないのです。 でもとりあえず測定を続行しました。 |
 |
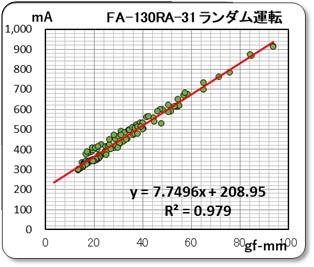 |
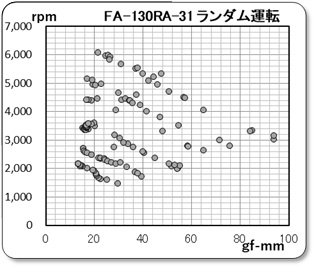
このNo.31のモータは、何時ものような傾向をしてしています。 供給電圧が一定の状態では、負荷によって右下がりの傾向しめしています。さらに電圧を変更すると平行移動板いるのが分かります。 また、負荷回路がオープンの時と、クローズの時の測定限界もシッカリと現れれています。
|
実はこの測定中にトルクの測定が変であることに気が付きました、データの飛びや異常値が発生していたのです。よくよく観察すると、回転速度が高いときに異常値が出ていることが分かりました。原因はモータから発生したノイズによって、ロードセルのデータを狂わせてたのでは無いかと考えています。
● モータ特性の解析
測定で得られたこれらのデータをもとにして、先回実施した手法にて特性値を求めるべき解析を実施しました。
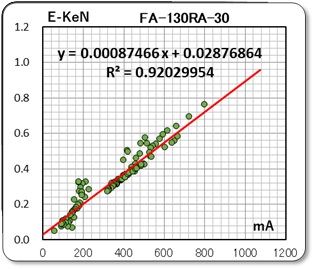
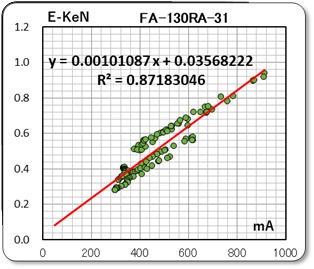
まず、 Ke の値がすでに求められていますので、
E - Ke・Nm = Ra・I + Eb
として上記のランダム測定したデータより左辺の値を計算してグラフ化しました。その勾配とY切片を読み取れば、巻線抵抗Raとブラシ部電圧降下Eb を、ダイレクトに読み取ることが出来るのです。なお、mA をA の単位に換算し直して抵抗値として求めています。
 |
 |
|
|
|
これらの値は、カタログから計算した値とか上記で求めた値とほぼ同じですね。
*******************************************************
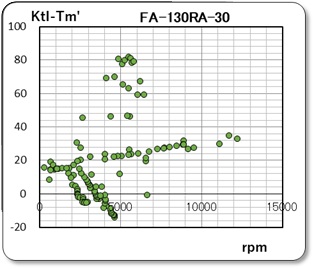
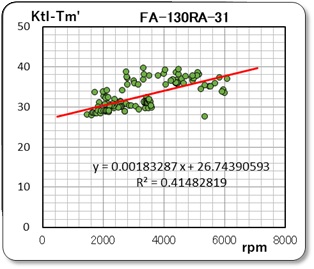
次にモータ軸の摩擦損失を推定しました。方法は前回と同じように、Kt・I - Tm' の値を計算して回転数を横軸にグラフ化しました。下の左端のグラフです。
 |
 |
 |
|
||
 |
 |
 |
|
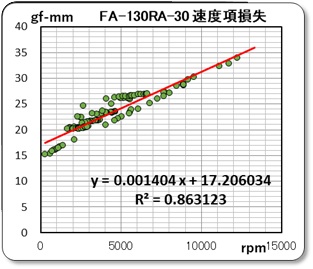
でも、No.30 のモータはやはり変なパターンとなっています。トルク損失は回転数と関係するとした考えでグラフ化したのですが、先回と同じようにその関係を見出せませんでした。そこで、速度項とトルク項に分解してグラフ化しました。 でもトルク項の損失は変なパターンです。 そこで、このモータに関してはトルク項を無視し、全てゼロとすることにしました.
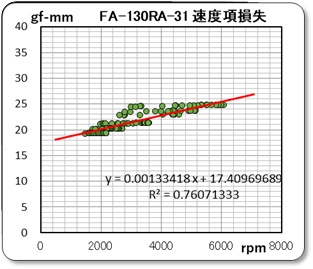
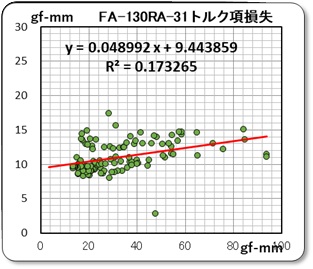
また、No.31 のモータは納得に行くデータとなっていますが、今までの解析式に適応させるため、速度項とトルク項に分解するのを止めて、左のグラフから求めてあ近似式を採用することにした。これは、トルク項がほぼ一定値であると見なしたからです。
カタログ値から計算した値とはかなりかけ離れてしまいました・・・・・・・・。
■ 推定特性値よりカタログに示された特性と比較する
このように推定してきた特性値は、カタログに示された値と合致するのか検証することにしました。
その方法は、「モータ特性のモデル化 改良版」(2016/10/25)の式を使用し、無負荷時の回転数と電流、およびストール時のトルクと電流を計算しました。
| 電圧 1.5V | 無負荷時 | ストール時 | |||
|---|---|---|---|---|---|
| 回転数 | 電流 | トルク | 電流 | ||
| カタログデータ | 9,100 rpm | 0.20 A | 28 gf-cm | 2.1 A | |
| 推定計算値 | No.30 | 8710 rpm | 0198 A | 24.9 gf-mm | 1.79 A |
| No.31 | 8,229 rpm | 0.294 A | 18.4 gf-mm | 1.48 A | |
カタログ値に対してNo.30 の個体は近い値を示していますが、No.31 の個体はかなりかけ離れています。測定誤差かもしれませんが、個体によってはバラツキが大きいようです。
************************************************
また、「モータ特性の測定とモデル化 データのまとめと比較」(2019/5/27)に示した方法にて、効率や出力なども計算してみました。その結果を下のグラフに示します。
このグラフを見ている時、カタログで言う定格とは、最大効率の状態を言っているものと推定しました。
■ まとめ
N増しとして実施した測定ですが、今回の測定ではカタログ値とかなり異なったり、個体差がかなりあることもわかりました。
しかし、測定結果にも自信がありません。それは、トルクデータの異常がかなりの頻度で発生していたからです。異常データは、供給電圧を大きくすると頻繁に発生しており、モータのビビりや測定レバー等のガタなどを疑って調べてみたのですが、改善しませんでした。ネットでもこの HX711 に関するトラブル事例を見たのですが、その対策の中にノイズ対策がありましたので、モータから発するノイズによってロードセルの歪計とその処理回路に影響したのではないかと考えています。
自分の出来る対策として銀紙を巻くなどの方法で検討してみることにします。
************************************************
次回は、続けて他のモータの測定を実施するつもりです。
2026/1/22