
HOME >> 動力車の調査 > KATO EF66-51 その1 その2 その3
動力車の調査 KATO EF66-51 その1
動力車調査の第3弾として、KATOのEF66-51を選び分解調査することにした。 このモデルはEF81型から始まったフライホイール搭載動力ユニットの最終段階に発売されており、このタイプの動力ユニットの完成型として、その動力特性を調査することにした。
■01 車両の概要
性能測定の前に、このモデルの概要と分解調査の結果を報告する。
 .
.
このモデルの詳細は、マイコレクションの EF66-51 を参照して下さい。 重複記載あり。
模型車両の特徴: ・ヘッドライト点灯 ・フライホイール搭載動力ユニット など。
| メーカー | KATO | 商品名 | EF66 後期形 |
| 品番 | 3047 | 車両番号 | EF66-51 |
| 発売日 | 2004年10月発売
2011年 9月 16日 (再生産) |
入手日 | 2011年 9月 18 日 再生産品の新品購入 |
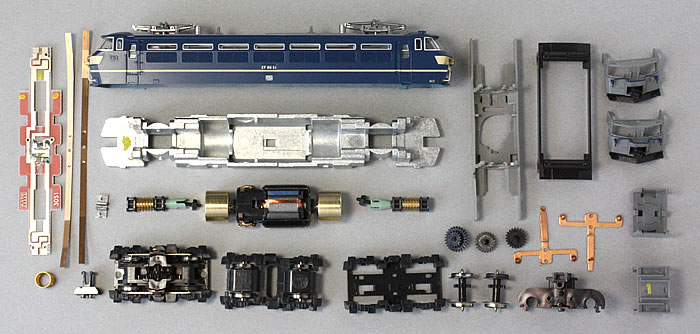
◆ 構造を理解するために、車体を少しずつ分解していきましょう。 部品に付けられた黄色のマークは、再組付けの時に参考とする1エンド側を示すマークです。


 .
.
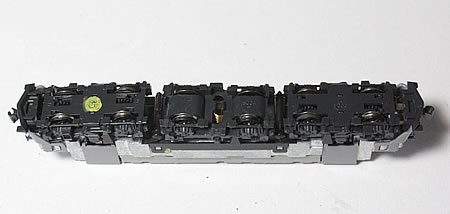
主な部品の分解状態を上の写真に示します。 ダイカスト製のフレームは一体的に作られているタイプであり (左右あるいは上下に分割されていない)、型番の刻印は 3034 であった。 この番号は品番 3034 を意味していると推定すると、その車種はEF210 を意味することになり、 この車種と同一のフレームを使用しているものと考えられる。
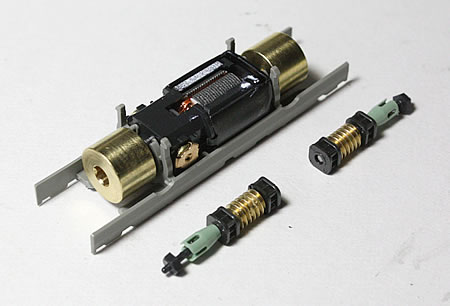
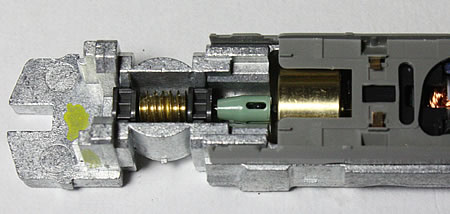
次に、モータとジョイント、およびウォームを右の写真に示す。 緑色のカップリングやモータ支持部材などは、初期のフライホイールモデルと同じ形状と思われるが、モータ端子はやや短くなり、ライト基板との接触方法も変更されている。
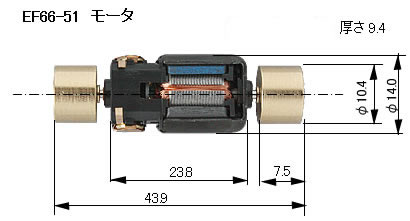
このモータは、フライホイール付きで、2ポール5スロットのスキュー無しマグネットモータであるが、形状的には端子部が短くなったこと以外は昔のままである。 しかし、巻き線の仕様等は変更されている可能性があり、マグネット端部は青色と白色の色付けがあり、設計変更を示すマーキングを思われる。 外観寸法を下に示すが、 EF510-1 等と形状的には同じである。
 .
.
また、 ウォームの軸受けは当初のモデルと同じダイカスト製のフレームに直接はめ込む方式である。
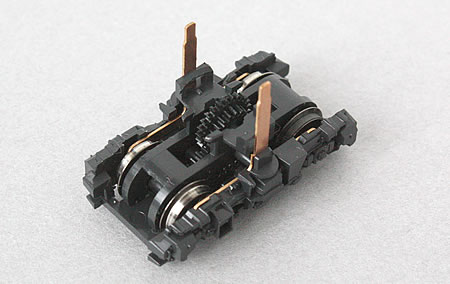
動力台車の全体を右の写真に示す。 歯車ケースの品番は 3004-1 で、下のカバーも同じの刻印であった。 この品番を使用している車種は、1978年発売の初代 EF66 の「3004」のみで、「-1」付きの品番の車種は見当たら無い。 当初はEF66 の改造モデルとして、「3004-1」 の品番で開発を進めていたが、 途中から方針変更されて、新品番「3046」あるいは「3047」が付与されたものと推定する。
ちなみに同時期に開発されていた EH10 「3005」 の改良モデルは、 2004年に「3005-1」の品番で発売されている。 新しい構造に変更されているので、自動車業界ではフルモデルチェンジと言われ、新しい品番が付与されるのが普通であるが、マイナーチェンジ対応のハイホン付きの “設計変更処理” として対応している。 そして、この 3004-1 もその名残ではないかと思うだが・・・・・・・真相は如何に。
歯車の構成は、第1弾で説明したEF510-1と同じ構成で、ウォームは m = 0.3 の1条ネジで、ウォームと噛合うホイールは Z = 26 である。 このホイールは2段歯車となっており、アイドラギヤを介して動輪につながる歯は Z = 17 で モジュールは同じm = 0.3 で作られている。 そして、動輪の歯車は Z = 17 であるので、動輪とホイールの回転は途中でアイドラギヤを介しても、同じ回転数となる。 そして、動輪を1回転させるためにはホイールも丁度1回転させる必要があり、このことは動輪を1回転させるためには、ウォームを 26 回転させる必要があることを示している。 即ち、減速ギヤ比は i = 26 のギヤ列を構成していることになる。
動輪径は、φ7.4mm で、内側の片方の動輪にトラクション・ゴムを履いている。 その他の諸元として、車体重量は 90.4 グラム、前後の台車の動輪に掛る荷重はそれぞれ 37.0 グラムであった。
■02 ライト基板の特性調査
まず、電気回路上、モータと並列に挿入されているライト基板の特性を調査しておこう。
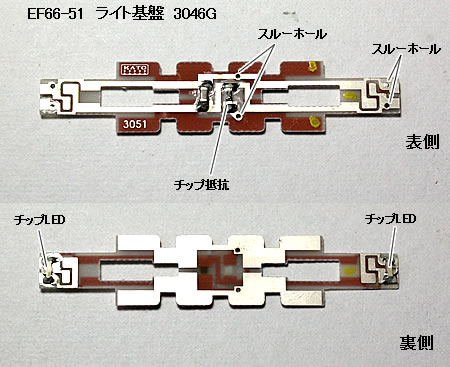
この基板は、EF510-1 と殆んど同じ形状をしており、表側と裏側に回路が形成され、スルーホールを通して導通されている。 両端には前後のライト用のLED が半田付けされており、 このLED と直列に記号が 561 のチップ抵抗も半田付けされている。 テスターで測定すると、559Ωであり記号通りの抵抗値であった。 ライト基板の品番は、3046Gであるが、基板に印刷されている 品番は3051 で、EF510-1と同じである。 形状的には、チップLED 部分の回路が複雑になっており、その形状は、一種のコンデンサを形成しているのではないかと思われる。
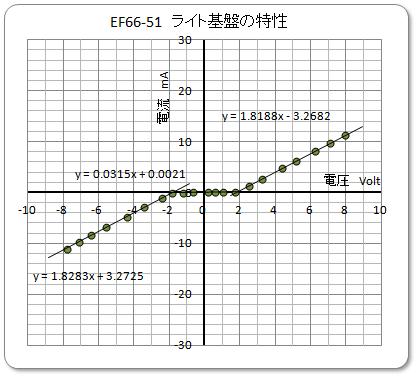
この中央付近の導線部をクリップで挟み、電圧を掛けながら電流を測定したのが右のグラフである。 2 Volt 近くになるとLED が光り出すと共に、電流は一直線状に上昇する。 極性を反転しても同様な傾向を示し、対称な特性であることが判る。 電流の上昇勾配は 1.82 mA/Volt である事から、約 550 Ωとなり、チップ抵抗の実測値と合致する。 電流の立ち上がりはおよそ 1.8Volt で、それまではわずかに電流が上昇しているが無視出来るであろう。 この特性はEF510-1と比較して同じであるが、電流の立ち上がりが、2.8Volt から 1.8Volt に小さくなっており、 チップLEDが変更されている(改良されている?)ようである。
■03 モータ単品の速度特性とトルク特性の調査
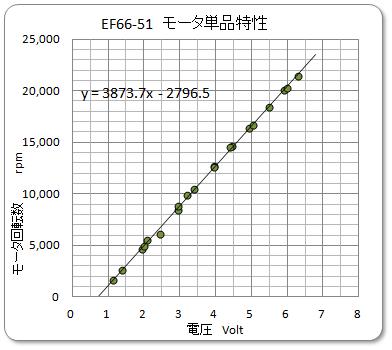
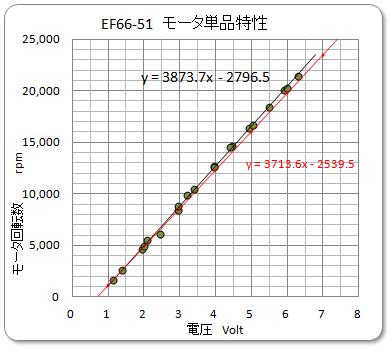
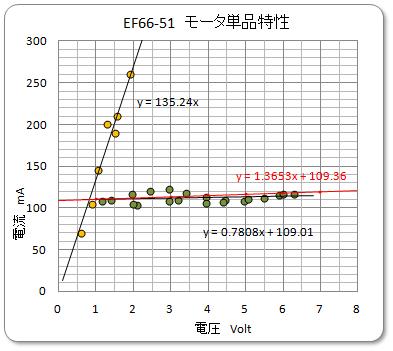
単品状態でのモータを測定する。 測定方法は、「モータのトルク特性を測定 その2」にて報告した方法で実施した。 最初に、速度特性として、モータに負荷を掛けないフリーの状態で、電圧と電流、および回転数を測定した。
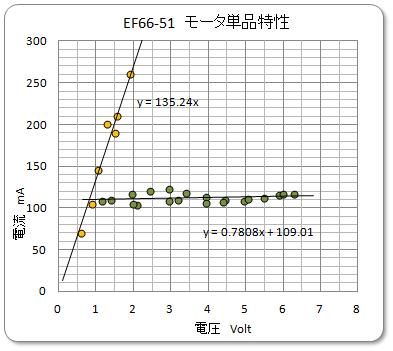
モータに負荷を掛けないフリーの状態での測定であるので、モータ出力トルクはゼロである。 この時、多くのモータでは、電圧を上げると(回転数の上昇に従って)電流値も増加しているが、このモータでは電流が殆んど変化していない。 これは、回転数が変化してもモータ内部の回転抵抗が変化しない事を示しているのではないかと視察する。
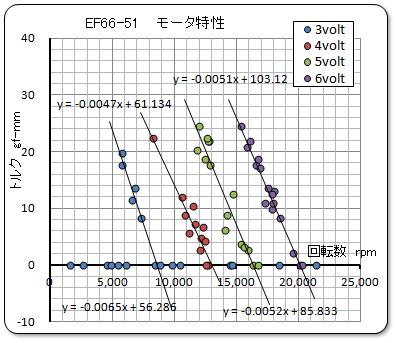
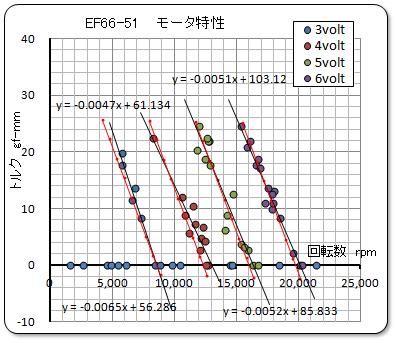
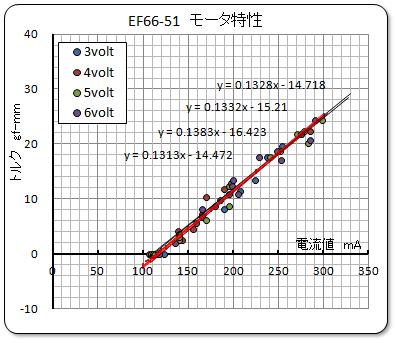
次に、負荷を掛けた状態で、トルク特性を測定した。 モータの端子電圧をパラメータにして測定するのだが、先回の例(EF65-51)では、パワーユニットのダイヤルをある程度合わせたら、そのままの状態でモータの負荷を変化させて測定を実施した。 しかし、モデル化のための定数推定作業に於いて、この特性へのマッチング状態を判断するには、さすがに不都合なので、以前のように、電圧一定の条件を保持するようにした。 とは言っても厳密には行かないので、±0.1volt 以内に収まるようにしている。 データ群としては、 3、4、5、6Volt の4種類の状態を測定した。 測定データを下に示す。
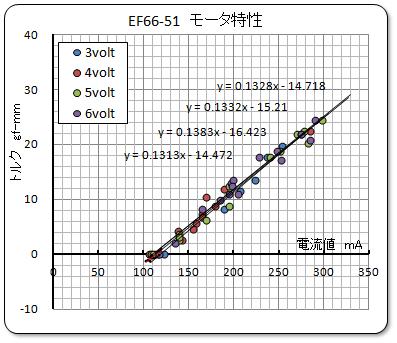
■04 モータ特性のモデル化
モータ特性の計算モデルは、モータの端子電圧と電流値から、その時のモータの回転数と出力として発揮しているトルクを計算で推定しようとするものである。 このための式は、第1弾でも説明したものと同じ式を使用する。
その方法は、定数をある程度推測しておき( 例えばEF510-1のデータなど )、その値を使って、測定データをまとめた Excel の表ソフトで計算する。 実測値の電圧と電流をもとに、モータトルクと回転数を計算し、実測値と計算値を比較しながら、定数を修正していくものである。 まさに手作業の逐次計算法そのものである。 評価項目は、実測値と計算値の合致具合で、下記のようにグラフを描きながら、1:1になる様に推定していくのである。 そして、モータ単品特性の、回転数-電圧、電流-電圧、トルク-回転数、トルク-電流などの特性グラムも見ながら、 傾き、位置、と共に、バラツキや直線性を見て行く。
実際の作業は、定数が多いので、まず回転数を見ながら Eb 、Ra 、Ke 、を決める。 そして、トルクを見ながら Kt 、λm 、Rm を決めて行く。 作業は意外と簡単である。 測定値自身の信頼性もあるので、バラツキ程度などはある程度の妥協が必要である。
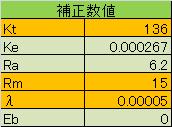
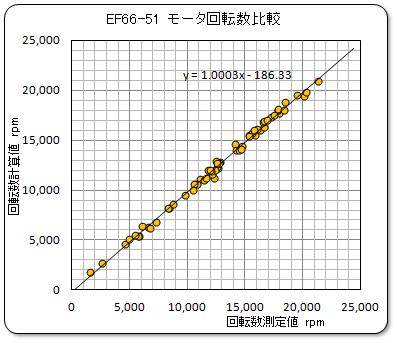
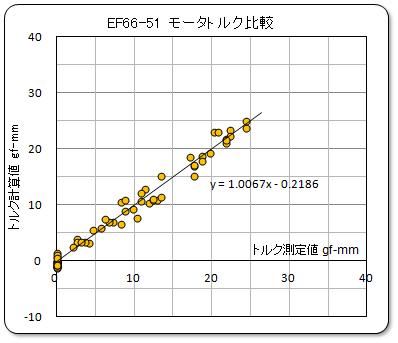
そして、定数としてもっともらしい値に落ち着いたのは、Kt = 136、 Ke = 0.000268、 Ra = 6.2、 Rm = 15、 λm = 0.00005、 Eb = 0.0 となり、その時の測定値と計算値の関係は下のグラフの通りである。
また、モータの無負荷状態での特性についても、実測値と計算値を比較することによって、定数の確からしさを判断することを追加した。
この6枚のグラフを見ると、探り当てた定数の値は、ピッタリとは言えないものの、それらしき近い値であると言えるであろう。
これらの定数は、計算値と実測値が良く合致すると言うだけで、本来の物理的値とかけ離れているのではないかと言う心配はある。 しかし、物理的数値を追求するのが目的ではないので、これで良しとしている。 また、他の車両のモータと比較して、モータ仕様が異なるのかどうか、あるいはバラツキの範囲内なのかは、まだデータ不足なので判断が付かない。
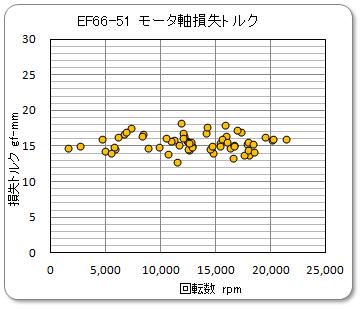
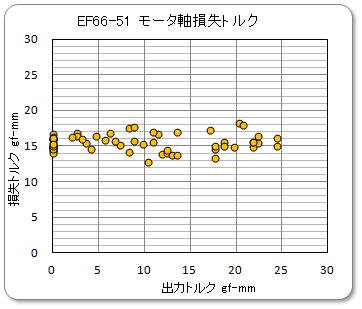
ここで、モータの回転子が電気的に発生しているトルクと、モータの出力トルクの差を、モータ内部の損失、即ちモータ軸の損失トルクと考えて、 計算してみることにした。 まず、モータの回転子が電気的に発生しているトルクとは、鉄道模型工学概論で述べた式(11)、即ち、
Tm = Kt・I
であるので、モデル化で計算している Kt の値を使用し、出力トルク Tm' と電流値 I からモータ軸損失トルクを計算してみた。
モータ軸損失トルク = Tm - Tm' = Kt ・I - Tm'
この結果を下のグラフに示す。 このグラフより、このモータの軸損失トルクは、およそ15グラム・mm で、回転数や出力トルクによって変化していない事が判る。
この結果について、モータについては詳しくないので、ただ単に “ へーーー・・・・!” と思いながら、ただ見ているしかないのであるが・・・・・・・・。 もっとデータを集めなくては何にも言えないのである。