
HOME >> 鉄道模型自動運転システム > 新登山鉄道 運転システムの検討
新登山鉄道 運転システムの検討
新しく登山鉄道のレイアウトを作っている。 長年愛用してきた登山ユニットはループを巻いて山の上に登って行く構成なのですが、ループ部分が景色を遮らにように二つのアーチ橋を設けいます。 レイアウト製作を始めた頃はなんとかそれらしき形が出来れば良いとの思いで工作していましたので、建築工学的、いや一般常識で考えてもおかしな形でした。 と言うことで、解体に着手したのですが、この登山ユニットにはやはり愛着がありますので、アーチ橋の部分を作り直す事にしました。
そしてこの際、今まで実施してきた卓上レイアウトの延長として、この登山ユニットだけでも楽しめないかと欲を出し、今回の工作を始めました。 そして、基本となるレイアウトの地面作りの第一段階が完成しましたので、今度は、その運転システムを検討することにしました。
■ 運転システムの仕様を検討する
今までの運転システムをベースにして手を加えることにしました。 まず、
- 自動運転を実施させる。
- 勿論、手動操作も出来るように、その切替はスイッチ操作で実行可能とする。
- 最大で3編成の電車を自動運転させることが出来ること。
- 走らせる電車の種類によって個別に速度調整が可能であること。
- 今回は、登山路線だけとするも、将来追加予定の街中レイアウトを想定したシステムにしておくこと。
- 運転状態が分かる表示パネルを設けること。
- 駅の入口部分には場内信号と出発信号を設けて、赤と緑の2灯式信号を点灯させること。
- そして、同時にその様子を表示パネルにも表示させること。
- この信号機の表示は、ポイントと進行方向が選択されたら、自動的に判断して表示すること。 信号機の手動操作はしない。
- 手動操作は、ポイントの選択と進行方向の選択を実施する。 進行方向選択は中立状態を設けて停車指令とする。
- 手動操作の場合の速度調整は、一つの調整ダイヤルのみを有効とし、同時に1編成の電車しか走行出来ないこととする。
- 自動運転の場合、ワンユニットのシケンスが終了したら、自動/手動スイッチの設定に従って、自動運転の終了か継続かを判断させる。
この様な要求条件を付けて、システムを構築していくこととする。 勿論この条件は絶対的ではなく、変更可能である・・・・・・・・!
■ レイアウトに組込んだ制御機器
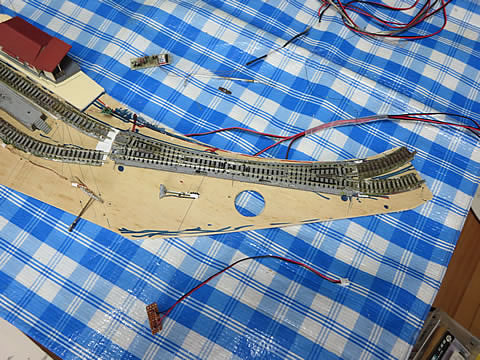
レイアウトの地面工作において、既に組込んでいるシステムを構成する制御要素機器類について説明しておこう。 まず、システムの中心部となる登山口駅周辺について述べよう。
この登山口駅プレートは、今までの機器類を再活用しているが、駅に入る部分のカーブを少し緩くするため、一部の線路を撤去している。 しかし他の部品はそのまま活用した。
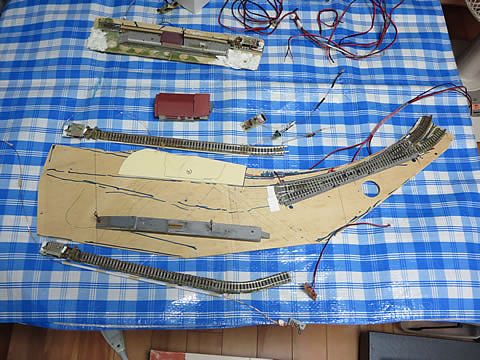
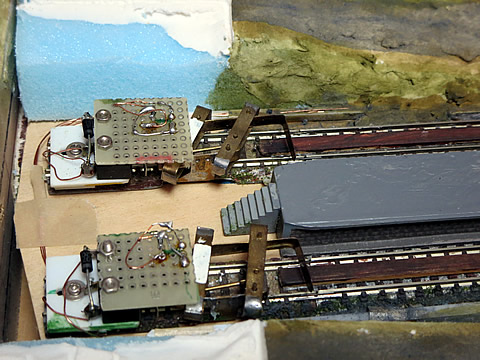
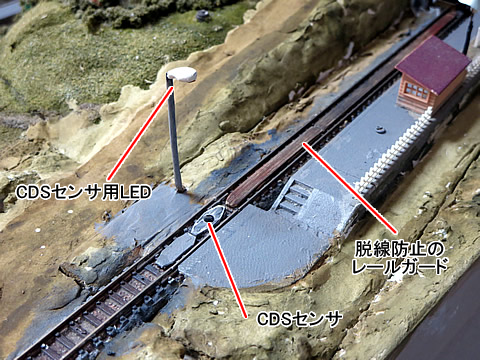
駅は行止まりとなっているのでレールエンドを設けている。 しかし、停止距離が短いので、市販のレールエンドでは電車が激突してしまい、多くは脱線転覆してしまう状態であった。 そこで、「車止め量産」(2017/7/14)にて工作した特製の装置を今回も活用している。 レールへの給電はマイクロスイッチを作動させて電源を遮断し、到着信号は平行リンクのアームを使ってフォトリフレクタを作動させる構成である。 この装置は、重量の軽いBトレ電車でも充分に機能する自信作なのだ。 それでも脱線する車両があるので、木製のレールガードを追加しています。

線路の分岐点となる部分には、KATO製の4番ポイントを使用して構成している。 そのいきさつは「登山鉄道のポイントを交換する」(2018/2/2)にて説明しているので参照下さい。 そして、システムへの給電部と通過センサとしてのCDSセンサも組込んでいるが、これも今までのものをそのまま再活用している。
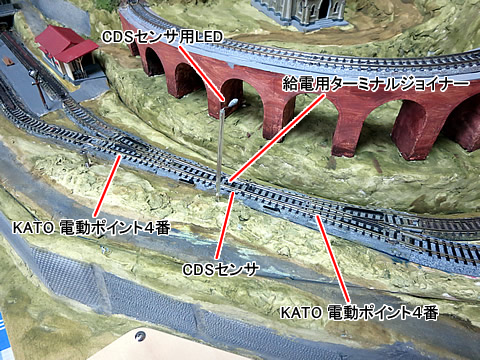
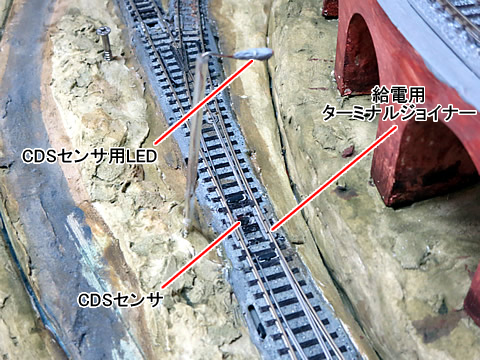
ここでの通過センサは、駅への入線時に減速させて走行させるためのセンサで、自動運転の場合のレールエンドでの激突防止の一環である。
*************************************************************
頂上駅プレートについても同様の装置を組込んでいる。 ホームは一面一線なので車止めは1ヶだけです。 通過センサも同様に設置しています。

 .
.
■ 制御要素の設定
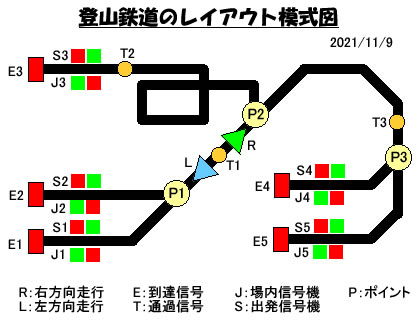
各機器の配置に合わせて、その場所と名称を決めておきます。 今回のレイアウトの路線配置を模式的に表し、それに合わせた各機器の配置状態を右のイラストに示します。 このイラストはそのまま、表示パネルにも採用するイラストです。
今回の線路配置は、今まで路線と基本構成は同じですが、スイッチバック部分は廃止しています。 また、街中駅は、「新登山鉄道 レイアウト台を作る」(2021/10/24)で説明したように、将来拡張予定の状態を先取りして設定しておくことにしました。 まだ工作していません。
この様な線路配置なので、給電ポイントは二つのポイントの中間部分に設定して置く必要があります。 このため、上記に示すように、ここにターミナルジョイナーを使って給電するようにしています。 そして、表示パネルでは、ここに車両の進行方向を緑と青のLEDで表示させることにします。 RとBと表示した部分です。 手動運転の場合は、この給電制御をスイッチによって制御出来るようにします。
そして、その間に登山口駅に入線する車両を検知するための通過センサ T1 を設置しています。 1番ホームと2番ホームのレールエンドに設けた到着信号 E1 と E2 によって車両が到着したことを感知して、次のシーケンス移るように自動運転を設定することができます。 従って到着信号は大切なセンサーなのです。
頂上駅には E3、街中駅には E4 と E5 を設置します。 通過センサは各駅の入口に T1 T2 T3 と設けています。 これによって減速走行をさせます。 また、3ヶ所に設けているポイント P1 P2 P3 によって走行パターンを制御しますが、手動運転の場合は、制御盤のスイッチでも直接制御出来るようにします。
各ホームには、場内信号機と出発信号を設ける予定なので、その表示方法もイラストの様に表示する予定です。
 .
.
■ 制御盤の検討
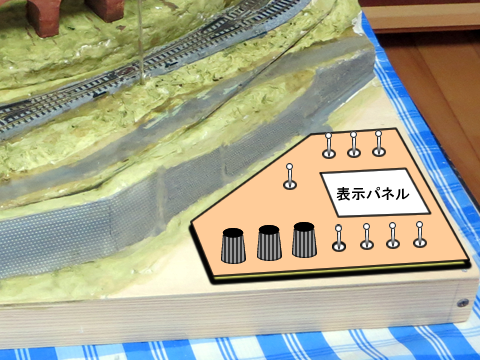
次に、制御盤の配置を検討しました。 当初から予定していた位置に、右のイラストのような制御盤を設置することにします。
電源スイッチや手動操作用のスイッチ、車両の速度調整用の可変抵抗ダイヤルなどがひつようです。
一番悩んだのは表示パネルです。 運転状態が分かるようにするためには、どの様な表示パネルにするか、また、それが工作可能かなども検討ました。 参考にしたのは、「ヤード操作盤の工作 その1」(2020/5/22 )ですが、今回は自動運転状態の場合でも表示出来るようにするために工夫が必要です。
そこで、制御用のマイコンとして Arduino を考えていますので、表示パネルのLED 制御も、このArduino を通して表示させるようにします。 こうすると、自動でも手動でも同じように表示できると考えたからです。 すると、パネル上にはLED を配置するだけなので、チップLED を使ってコンパクトにまとめることにしました。 ただ、Arduino のI/O ポートが増えてしまうので、Arduino MEGA が必要となりますね。
到着信号と通過信号、および進行方向のスイッチ操作情報は、Arduino への入力情報として必要ですが、表示のための信号処理は必要ありませんので、同時にダイレクトにLEDを点灯させるよう、回路を工夫することにします。
このほかに、ポイントのスイッチ操作情報を表示しようと考えましたが、場内信号と出発信号を見ておけば、ポイントがどちらに設定されたのか判断出来ますので、表示しない事にしました。
*****************************************************************************
その他の機器類として、制御用マイコンの Arduino MEGA 、給電制御とポイント駆動用のパワーユニット、センサ入力を処理するメインボード等が必要となりますが、これらは、レイアウトベース台の裏側に設置する予定です。
次回は、これらの電気回路を検討しましょう。
2021/11/10 作成