
HOME >> 鉄道模型実験室 > 車体の慣性による惰行走行
鉄道模型実験室 車体の慣性による惰行走行
■ はじめに
先回、超音波距離センサーを使って発進停止特性の測定について、特に停止時の特性に注目した報告した。 動力車が停止する時には、モータと直結しているフライホールの慣性によって惰行走行するが、この車両にもしモータが無かったら、車体の重さと車輪の抵抗によって、どこまで転がるのだろうかと思った。 車体の慣性による惰行走行と、モータの慣性による惰行走行の程度の差が判るような気がしたので、車体の慣性による惰行走行を測定してみた。
 .
.
■ 惰行走行の実験方法
実際の鉄道車両では、その重い重量と小さな走行抵抗により、かなりの惰行運転が見られる。 しかしNゲージでは、モータと動輪の間の駆動装置にウォームギヤを常時噛み合わせているため、モータが回れば走り、モータの回転が止まると車両はピタリと停止してしまうのである。 いわゆる惰行運転が出来ないのである。
そこで、車体の慣性による惰行走行を測定するため、このブレーキとなっているウォームギヤを取り外し、車両の停止特性を測定した。
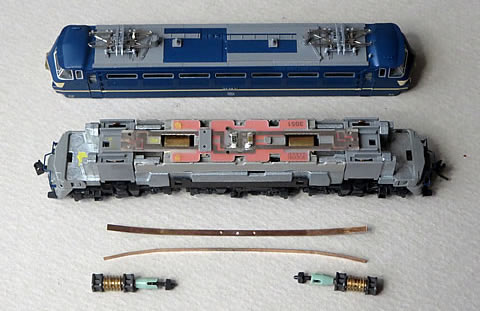
車両はKATO のEF66 後期形(品番:3047)を使用した。 右の写真。 モータの回転やライトの点灯も中止させるため、集電板も取り外した。 モータは重量があるので、その重さも慣性として生かすため、そのまま取り付けている。
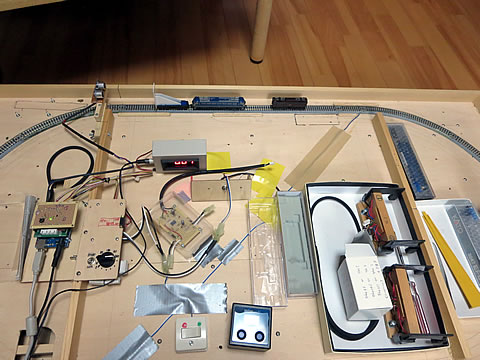
実験装置は下の写真のように、先回と同じものを使用している。 この試験車両は、モータの駆動系統を切断しているため自立走行ができないので、代わりの動力車で走らせている。 使用した車両は、フライホイールが搭載されていないマイクロのED17-2号機(品番:A2902)を使用する。 そして、カプラー部分にはセロテープを貼り付け、連結出来ないようにしている。 ただ、単に後ろから押すことができる状態にしている。
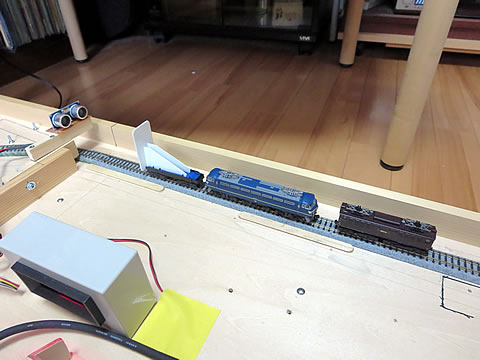
車両は、センサーに近い方から、反射板車両、試験車両(EF66)、駆動車両(ED17)を並べ、センサーに向かって走行させる。 即ち通常とは逆に逆走させるのである。 最初に定常走行時の速度を設定し、反射板車両を連結して周回路を走行させる。 最後のコーナーに入る前にセンサー部を下ろし、測定を開始する。 そして、直線区間に入ると少し一定速度で走らせた後に、供給電源を切る。 するとフライホイールの無い駆動車両は急停止するが、カプラーは連結されていないので、試験車両は押し出され、そのまま惰行走行に入り、やがて停車する。 このときの距離を測定していく。
今回は、動力特性を見ていないので、電圧電流は、慣性走行開始のタイミングを見るだけである。
■ 実験結果
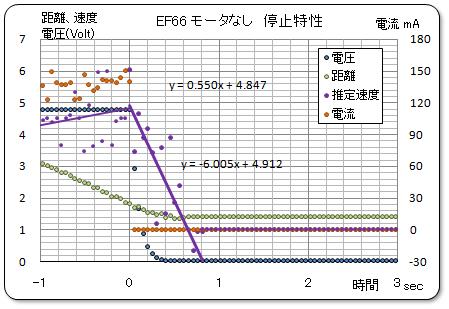
まず、反射板車両を連結しない状態で定常走行時の速度を100Km/h に設定し、実験を開始する。 その実験結果を下のグラフに示す。
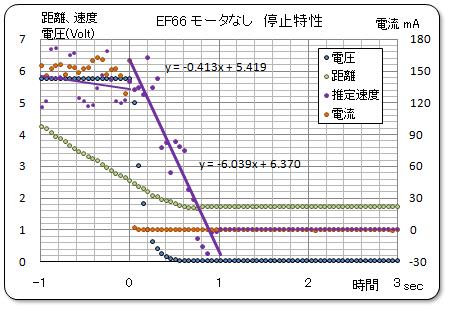
グラフの表示方法はこれまでと同じであるが、速度表示は逆走しているのでプラスマイナスを逆にしている。 惰行走行開始時点は、電流が変化し始めた一つ前のタイミングをゼロ時刻としている。
惰行走行開始時前の速度は、5.5〜6.0のあたりである。 スケール速度に換算すると、90〜100Km/h である。 そして、一定の値で減速し、0.9秒後には停止している。 このときの減速勾配は、-6.0目盛/sec と読み取れる。 さらに、距離データより停止距離を計算すると、83mm であった。
先回実験した停止距離と比較すると、ほとんど同じ結果となった。
これは偶然と思われるが、
車体の慣性による惰行走行と、
モータの慣性による惰行走行の程度の差は無いと言えるのである。
ウォームギヤによって、車輪からの力はモータに伝達できないのに、同程度の停止距離ということは、ウォームギヤがブレーキになったり、加速装置になっていない、すなわち空回りの状態であることを示しているのである。
もう少し勘ぐってみると、このようになるようにフライホイールの慣性モーメントを設計しているのではないかと想定するが、考え過ぎだろうか。 フライホイールの慣性モーメントが小さすぎるとウォームギヤがブレーキになり、大き過ぎると駆動力になるがその効果はあまり期待できないのではないだろうか。 大きなフライホイールを押し込んでもその効果が出ないので、せめてブレーキ効果だけは避けるようにと、KATOの技術陣は考えたのではないだろうか・・・・・! もし本当ならすごいぞ!
◆ 直線近似させた理由
今回の実験では、減速走行時の速度を直線近似させている。 先回の「ブレーキ回路での抵抗値による違い」では6次の多項式で近似して、その曲線を表示して速度特性としているが、これにははっきりとした理由がある。 モータの発電によるブレーキ作用では、ブレーキ力が一定ではなく、速度などに関係して変化しているからである。 しかし、今回の慣性走行では、ブレーキ力としては車輪やギヤなどの走行抵抗であるので、その値は、ほぼ一定で作用していると想定している。
ブレーキ力が一定であれば、ニュートンの運動方程式 F = mα のF が一定なので、αも一定となる。 この減速度が一定であることは、速度は一定の割合で減速していくので、その変化は直線的になる。 すなわちこの場合の速度は直線近似させるので正しいのである。
しからば、この減速勾配である-6.0目盛/sec のデータから、何が読み取れるのであろうか?
まず、速度表示は、グラフ表示上の細工で、1目盛りがスケール速度 20Km/h になることを先回説明した。 これは、実際の模型の速度に換算すると、
1目盛り=スケール速度 20Km/h =20× 100/54 mm/sec = 37.04 mm/sec
となる。 ここで、模型の縮尺は 1/150 として計算している。 この値に減速勾配を掛けて減速度αとすると、ブレーキ力F、すなわち走行抵抗を計算できる。
古い人間なので重量系単位で考えると、ブレーキ力 F (グラム)は、車両重量 W が 90.5 グラムであったので
F= 90.5/9800×6.0×37.0= 2.05 グラム
と計算される。 ムム・・・・・・・・・・・・・・・・・!
動力特性の測定値とピッタリではないか!
このEF66-51号機は、最近の測定方法で測定していないが、走行抵抗が2グラムということは間違い無いと言える。
EF66-51号機の測定データ: マイコレクション/EF66 51後期形 および 動力車の調査/KATO EF66-51
これらに記載しているグラフより、ウォームギヤに掛る力の形態が変化する点、すなわち遷移点と呼んでいるポイントを読み取り、そのときの駆動力がこの走行抵抗を示しているのである。
◆ 条件を変えてみる
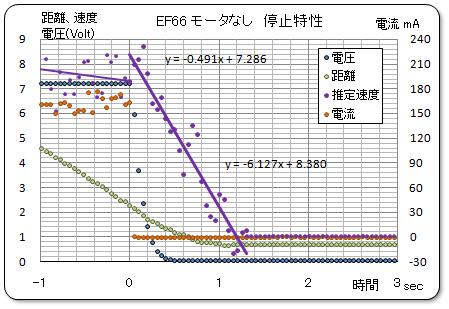
次に、定常走行の速度を変えて測定してみた。 簡易速度計にて速度を測定せずに実験を始めたが、下の左側のグラフが 70Km/h、右のグラフは 130Km/h のスケール速度と読み取れる。 そして、その減速度は、-6.0 目盛/sec と -6.1 目盛/sec を示している。
 .
.
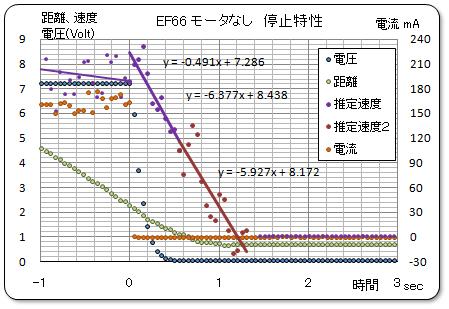
ここで、右のグラフのデータにおいて、減速領域を二つに分けて、それぞれ直線近似させてみた。 これは、速度の大小によって減速度が変わるのかを見るためである。 その結果を右のグラフに示す。
その結果、高速領域の減速度は、-6.4 目盛/sec 、 低速領域の減速度は、-5.9 目盛/sec となり、速度によって多少変化することが分かる。 上のグラフと合わせて考えると摩擦による走行抵抗は、速度が速いほどやや大きくなるようであるが、誤差を考慮するとその範疇に含まれてしまうかも知れない。
◆ 傾斜方式による走行抵抗の測定
以前から実施しているトレラー車の走行抵抗測定法である傾斜方式によって測定してみた。 参考: トレーラ車の特性を測定する
その結果、6mm の段差では、少しは動くものの継続しないが、7mm の段差では下まで転がっていく。 これより、走り出し時の走行抵抗は、2.1グラムと計算される。
■ まとめ
動力車をトレーラ車状態にして、慣性走行による減速具合を測定すると、その動力系の走行抵抗がきれいに測定できることが判明した。 さらに、動力特性から推定していた値とも一致し、傾斜方式によって測定された値とも合致することが判り、我がホビー実験室としては充分に満足のいく結果を得ることができた。 また、模型車両の走行抵抗が、速度によってはほとんど変化しないということも明確になったと考えている。
また、モータに適切なフライホイールを装着したことにより、慣性走行時におけるウォームギヤによるブレーキ作用を抹消させ、あたかも車両自身の慣性によって走行しているかのような効果を得ることができている事も分かった。