
HOME >> 鉄道模型実験室 > 小型DCモータの調査 タミヤのモータ 130
鉄道模型実験室 No.273 小型DCモータの調査 タミヤのモータ 130
手持ちの小型DCモータについて、運転準備が整ったのでテスト測定を実施した。今回はタミヤのモータ 130 を測定しました。
■ タミヤのモータ 130
今回は、タミヤのテクニクラフシリーズに使用されているモータを測定した。このモータは、タミヤ製テクニクラフシリーズのNo.97 ツインモータギヤボックスに使用されているモータである。説明書等を見ても、モータの形式は 130 としか記入されておらず、勿論メーカー名等は全然不明である。ただし、同じシリーズ No.167 シングルボックス(4速タイプ)では、同じ形状で同じ大きさのモータにはFA-130 と記されていました。そこで外形など全く同じなので、FA-130 形式と解釈した。
このシリーズは乾電池を1個または2個使用すことを前提にしていることの他は、何も説明が無いので、事前の仕様は不明である。 このモータは、自分の管理ナンバーとして、No.97に使用されていたモータをNo.32 とNo.33 と、No.167に使用されていたものをNo.34とした。


■ モータの取付
このモータを測定装置のモータ取り付け台に固定します。取付方法は先回の RF146Wモータの場合と同じ金具を使用して固定しています。ただし、最初に測定したNo.34 モータでは異音がしていたので、固定方法を少し変更しました。

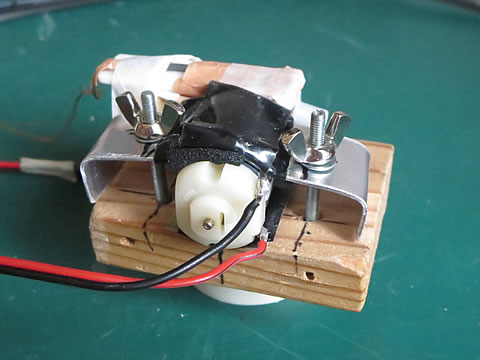
まず、上左の写真に示すように、金具部分にビニールテープを巻き付けて緩衝材としましたが、クッション性が不足していたので、ICチップの保護材と使用されていたスポンジを追加しました。モータの取付状態を右に示します。ネジを強く締め付けなくてもモータをシッカリと固定出来ました。
でも、モータの異音は無くならず、モータ不良としてNo.34 モータの測定を中止しました。
■ 測定結果
測定された結果を見ていきましょう。今回の測定は「DCモータのブレーキ特性 特性の解析 その1」(2025/12/3)で報告したように、逆起電力定数Ke を直接測定する方法を基本データとして測定を実施しました。
● ジョイント無しの無負荷運転
作動を確認して問題なければ、一度ジョイントを外してモータを無負荷で運転します。これは、モータの無負荷特性を測定するためと、トルク計のゼロ点チェックを実施するためです。
 |
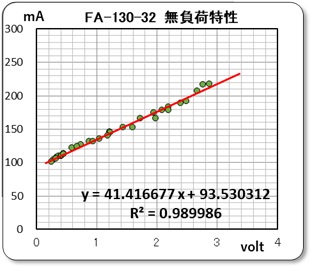 |
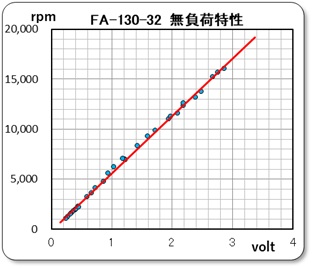
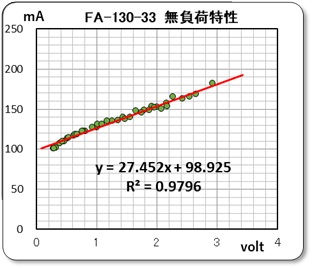
グラフからの読み 供給電圧が1.5voltの時: 回転数 = 8,463 rpm 電流値 = 156 mA |
 |
 |
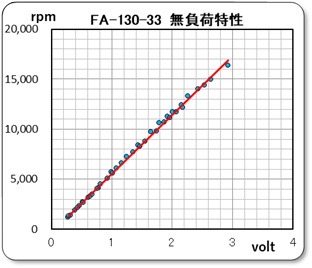
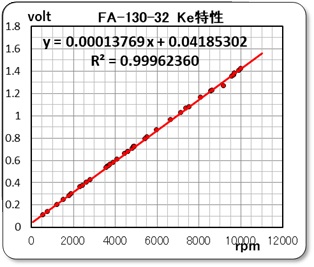
グラフからの読み 供給電圧が1.5voltの時: 回転数 = 8,508 rpm 電流値 = 140 mA |
モータが回転を始める電圧は測定していません。でも意外とスムースな立上りです。電流値の値は、Nゲージ鉄道模型用とは異なって、低電圧高電流仕様なので電流は大きめです。
● 電気回路をオープンにしての測定
次に、外したジョイントを元に戻し、今度は駆動側モータと負荷側モータの配線を取り換えます。即ち、測定対象のFA-130 モータを負荷側モータにして、強制的に回転させます。この時の電気回路はオープン状態にしておきます。
これは、電気回路がオープンですので電流は流れませんが、モータは強制的に回転させられるので逆起電力が発生するのです。この時の電圧を測定して、逆起電力定数Ke を測定する手法なのです。
 |
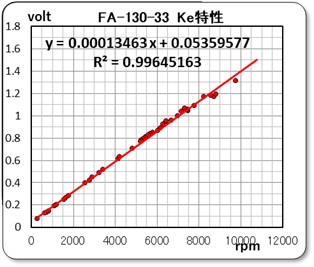 |
二つのモータの特性は揃っていますね。 |
|
|
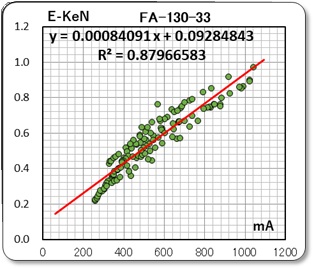
電流がゼロの時、発生する電圧Eは、逆起電力定数をKe、ブラシ部電圧降下を Eb 、回転数をNm とすると、E = Ke・Nm + Eb となります。そこで、電圧 E と回転数 Nm の関係をグラフにして近似直線を求めます。すると、その式の勾配がKe となり、Y切片が電圧降下Eb を示すことになります。
と今まで考えてきたのですが、電流は流れてないのに電圧降下が発生するとは矛盾していますね。そこで、グラフの近似曲線設定時に、ゼロ点を通るように指定すると低回転領域の直線近似はズレていくので、ゼロ点指定は止めにしました。
また、 「カタログ値からDCモータの特性値を推定する」(2025/11/23)に示した単位の換算より Kt も計算できました。
● トルク特性の測定
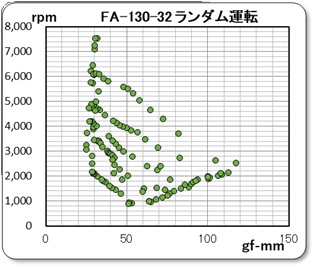
次に、トルク特性を求める測定を実施します。しかし、供給電圧をパラメータとした今までと同じ方法では、シャント抵抗による電圧降下の影響が大きくなるので、パラメータ設定を中止しました。そこで、ランダム状態で測定する方針でしたが、データの傾向が分かるのがよさそうと考えて、供給電圧は固定している状態で、負荷条件を変化させながら測定する方法と、負荷回路をオープンとクローズ状態にして電源電圧を変化させる方法を併用して実施しました。
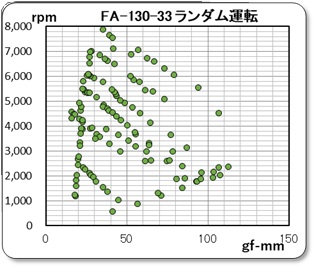
このやり方の利点は、測定な可能な領域をほぼカバーできると考えたからです。下の左側のグラフを見ると、右下がりのデータ列が電圧固定の場合では、その両側のデータ列が負荷回路固定の場合です。「DCモータのブレーキ特性 特性の解析 その2」(2025/12/5)にて報告した制御できる範囲と対応している様子が分かります。
測定結果を下のグラフに示します。
 |
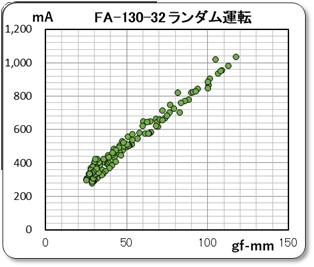 |
測定可能な範囲をほぼカバーしています。 |
 |
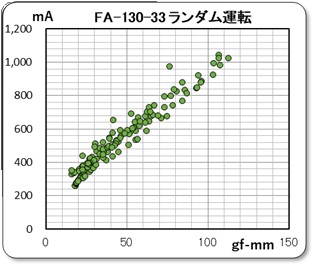 |
測定可能な範囲をほぼカバーしています。
|
今回の測定のまえに、簡単なノイズ対策を実施しています。ロードセル処理ユニットを含めて配線部全域にに銀紙を巻き付けています。その効果は現れており、データの飛びなども殆ど無くなりました。
また、最後に測定したNo.32 モータの場合に気が付いたのですが、測定後半になって、データのバラツキが少なくなっている事に気が付きました。モータが暖かくなってきたのかな?・・・・・・・・・。そうだ暖機運転のことをすっかり忘れていたのです。そこで、No.32 のモータの前半データを削除して表示しています。次からは、暖機運転を実施することにします。
なお、使用している安定化電源の容量は、電流が最大で1.0A しか流せないので、最大電流の測定限界となっています。乾電池等を使用すればそれ以上は可能ですが、面倒なので実施していません。
● モータ特性の解析
測定で得られたこれらのデータをもとにして、先回実施した手法にて特性値を求めるべき解析を実施しました。
まず、 Ke の値がすでに求められていますので、
E - Ke・Nm = Ra・I + Eb
として上記のランダム測定したデータをもとに、左辺の値を計算してグラフ化しました。その勾配とY切片を読み取れば、巻線抵抗Raとブラシ部電圧降下Eb を、ダイレクトに読み取ることが出来るのです。なお、mA をA の単位に換算し直して抵抗値として求めています。
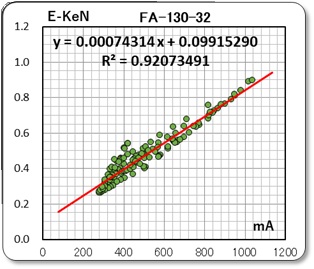 |
 |
二つのモータの特性も揃っていますね。 |
|
|
*******************************************************
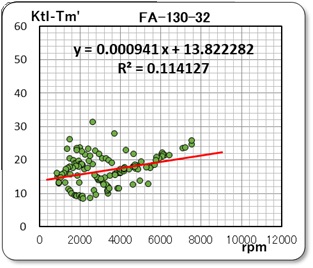
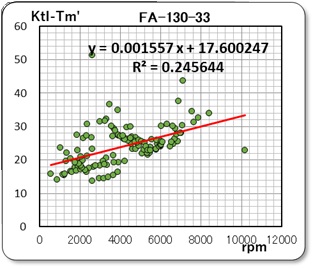
次にモータ軸の摩擦損失を推定しました。方法は前回と同じように、Kt・I - Tm' の値を計算して回転数を横軸にグラフ化しました。下の左端のグラフです。
 |
 |
 |
|
||
 |
 |
 |
|
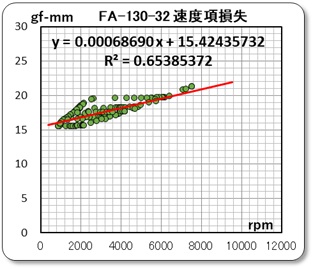
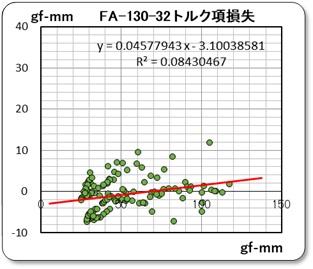
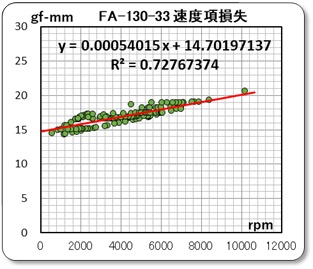
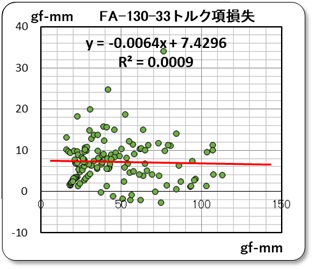
今回も、モータ軸の損失は回転数と関係するとした考えでグラフ化したのですが、先回よりは関係を見出せそうに思えました。試しに、速度項とトルク項に分解してグラフ化しました。速度項は綺麗なグラフになりましたが、トルク項の損失はバラツキの大きいパターンです。 そこで、このモータに関しては最初のグラフから速度の関数として摩擦損失に関する特性式を強引に求めました。
■ 推定特性値よりカタログに示された特性と比較する
このように推定してきた特性値を推定計算式にて計算しました。その方法は、「モータ特性のモデル化 改良版」(2016/10/25)の式を使用し、無負荷時の回転数と電流、およびストール時のトルクと電流を計算しました。
| 電圧 1.5V | 無負荷時 | ストール時 | 無負荷時のデータについて: グラフから読み取った値と、推定した値とでは、電流値はほぼ合っているが回転数はやや離れています。 |
|||
|---|---|---|---|---|---|---|
| 回転数 | 電流 | トルク | 電流 | |||
| No.32 | グラフ読み取り | 8,463 rpm | 0.156 A | *** | *** | |
| 推定計算値 | 9,269 rpm | 0.168 A | 239 gf-mm | 1.89 A | ||
| No.33 | グラフ読み取り | 8,508 rpm | 0140 A | *** | *** | |
| 推定計算値 | 8,949 rpm | 0.240 A | 201 gf-mm | 1.67 A | ||
************************************************
また、「モータ特性の測定とモデル化 データのまとめと比較」(2019/5/27)に示した方法にて、効率や出力なども計算してみました。その結果を下のグラフに示します。
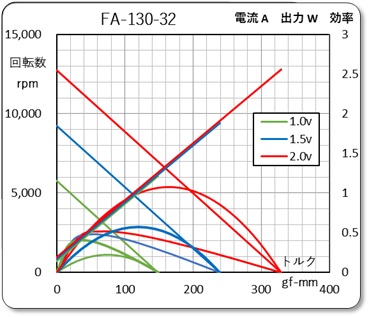
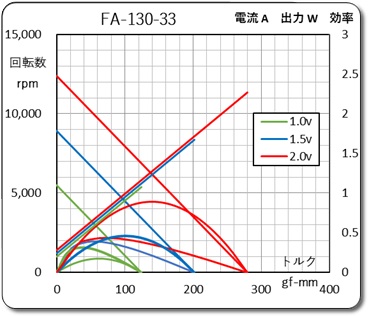
このグラフを見ていると、最大効率の状態を把握することができます。
■ まとめ
N増しとして実施した測定ですが、今回も同じタイプのモータを2個測定しました。今回の個体には大きな差はありませんでした。 HX711 に関するノイズ対策を簡単に実施したが、効果があったようでしたので継続して実施してみます。
************************************************
次回は、続けて他のモータの測定を実施するつもりです。
2026/1/25